







| 字母缩写 | 英文全称 | 中文含义 |
| R | Radar | 毫米波雷达(短/中/长距) |
| V | Vision | 摄像头(前/环/周/后视) |
| L | Lidar | 激光雷达 |
| U | Ultrasonic | 超声波雷达 |
1. 超声波雷达(USS, Ultrasonic Sensor System)


超声波雷达通过发射超声波并接收反射回波,利用时间差计算距离。常见的超声波雷达分为UPA和APA,前者主要安装在前后保险杠,用于倒车辅助;后者安装在车身侧面,用于自动泊车。超声波雷达的优点在于结构简单,价格低廉;缺点在于探测距离较短,且易受周围环境干扰,造成误报。
| 超声波雷达类型 | 水平探测角 | 测量距离 | 用途 | 主要厂商 |
| UPA Ultrasonic Parking Assistant 超声波驻车辅助 | 120° | 15-250 cm | 探测前后障碍物 | 奥迪威 博世 法雷奥 |
| APA Automatic Parking Assistant 自动泊车辅助 | 80° | 30-500 cm | 探测侧方停车空间 |
AK2 与AK1超声波雷达相比,最大的区别在于可编码性,通过信号调整提高产品抗干扰能力。AK1 在工作时,为避免同频干扰,同侧保险杠的所有探头轮次发波,所以系统刷新周期较长。而 AK2 通过一些特殊的编码方式可实现多个传感器同时收发,有些还支持同时发送不同的超声信号,从而大大缩短系统刷新周期。

2. 毫米波雷达(Millimeter-wave Radar)


毫米波雷达利用毫米波段电磁波(频率范围为30GHz到300GHz,波长为1毫米到10毫米)进行探测和测量。它可主动发射电磁波,穿透烟尘,几乎不受光线和天气影响,帮助车辆实时感知周围物体并提供较为准确的距离和速度信息。按照频段划分,主要分为24GHz和77GHz毫米波雷达,目前77GHz逐渐成为主流;按照测量距离分,主要分为LRR(Long Range Radar), MRR(Middle Range Radar)和SRR(Short Range Radar)。
| 毫米波雷达类型 | FOV | 测量距离 | 用途 | 主要厂商 |
| LRR | ±15° | 200 m左右 | ACC/AEB | 大陆 博世 华为 |
| MRR | ±45° | 100 m左右 | ACC/AEB | |
| SRR | ±80° | 60 m以内 | BSD/ALC/RCTB |
3. 前视摄像头(Camera)

前视摄像头通常采用200M~800M像素摄像头,并通过先进的图像识别技术,实现对车辆、行人、骑行者、车道线、红绿灯以及限速牌等周围环境的检测。根据摄像头数量的不同,主要分为单目、双目和三目摄像头。前视摄像头的主要优点为能对目标类型、红绿灯、车道线等进行准确识别,且成本较低;主要缺点为受天气、光照等影响大,且对距离、速度等识别精确度不及毫米波雷达。
| 前视摄像头 | 水平探测角 | 测量距离 | 用途 | 主要厂商 |
| 单目/双目/三目 | 100°左右 | 200 m | 识别车辆、行人、骑行者、车道线、红绿灯及限速牌 | 特斯拉 博世 Mobileye 地平线 |

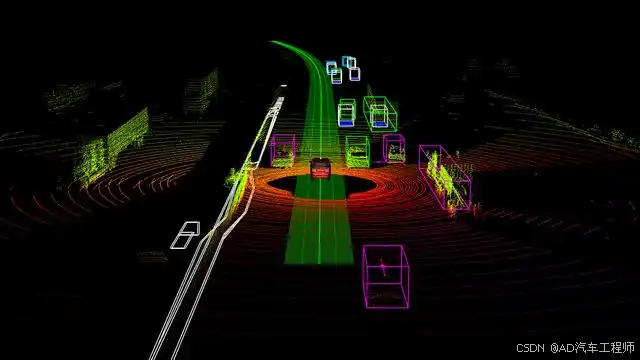
4. 激光雷达(Lidar)


激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达系统。激光雷达的优点在于高精度和高分辨率、具有三维成像能力以及受光照影响小;主要缺点在于价格高昂、数据处理复杂以及功耗较大。根据扫描方式不同,激光雷达分为:机械式、半固态式和全固态式。
| 激光雷达种类 | 水平探测角 | 测量距离 | 用途 | 主要厂商 |
| 机械式 | 360° | 300 m | 检测车辆周围的车辆、行人、骑行者等 | Velodyne 禾赛科技 速腾聚创 大疆 |
| 半固态 (转镜式、棱镜式、MEMS) | 120° | 200 m | ||
| 固态 | 120° | 150 m |
5. 环视摄像头


环视摄像头通过多个超广角鱼眼摄像头采集图像,并通过图像处理技术将这些图像拼接成一个360度的全景图像,从而实现对周围环境的全面监控。
| 环视摄像头 | 水平探测角 | 测量距离 | 用途 | 主要厂商 |
| / | 180° | 10 m左右 | 对车辆周围的环境、车位进行检测 | 同致电子 德赛西威 法雷奥 欧菲光 |



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









