






目录
1.1贝尔曼期望方程(Bellman Expectation Equation)
1.2贝尔曼最优方程(Bellman Optimality Equation)
在强化学习中,"DP"是"Dynamic Programming"(动态规划)的缩写。
Dynamic Programming(动态规划)是一种用于解决具有重叠子问题性质和最优子结构的问题的算法技术。动态规划之所以称为“动态”,是因为它通过逐步构建子问题的解来求解整个问题。
在强化学习中,DP被用于解决最优控制问题,特别是在有限马尔可夫决策过程(Finite Markov Decision Process,简称MDP)中。
动态规划算法通过在MDP中的状态空间上进行迭代,计算每个状态的最优值函数(Value Function)或最优策略(Policy)。
1贝尔曼期望
贝尔曼方程是强化学习中一个重要的方程,它描述了值函数在马尔可夫决策过程(MDP)中的递归关系。贝尔曼方程用于求解最优值函数,从而找到最优策略。
在强化学习中,MDP由四元组 (S, A, P, R, γ) 组成:
- S 是状态空间,表示所有可能的状态。
- A 是动作空间,表示所有可能的动作。
- P 是状态转移概率函数,表示在状态 s 下采取动作 a 后转移到下一个状态 s' 的概率,即 P(s'|s, a)。
- R 是奖励函数,表示在状态 s 下采取动作 a 后获得的即时奖励,即 R(s, a)。
- γ 是折扣因子,用于权衡当前和未来奖励的重要性(0 <= γ < 1)。
1.1贝尔曼期望方程(Bellman Expectation Equation)
描述了值函数 V(s) 之间的递归关系。对于任意状态 s,它的值函数 V(s) 定义为从该状态出发采取最优策略后可以获得的期望累积奖励。该方程如下:
V(s) = E[ R(s, a) + γ * V(s') ],对所有可能的动作 a 和下一个状态 s' 求期望。
表示一个状态的值函数等于该状态下采取所有可能动作后得到的即时奖励和下一状态值函数的折现奖励之和的期望。
1.2贝尔曼最优方程(Bellman Optimality Equation)
程描述了最优值函数 V*(s) 之间的递归关系,从状态 s 出发采取最优策略后可以获得的期望累积奖励。该方程如下:
V*(s) = max [ R(s, a) + γ * V*(s') ],对所有可能的动作 a 和下一个状态 s' 求最大值。
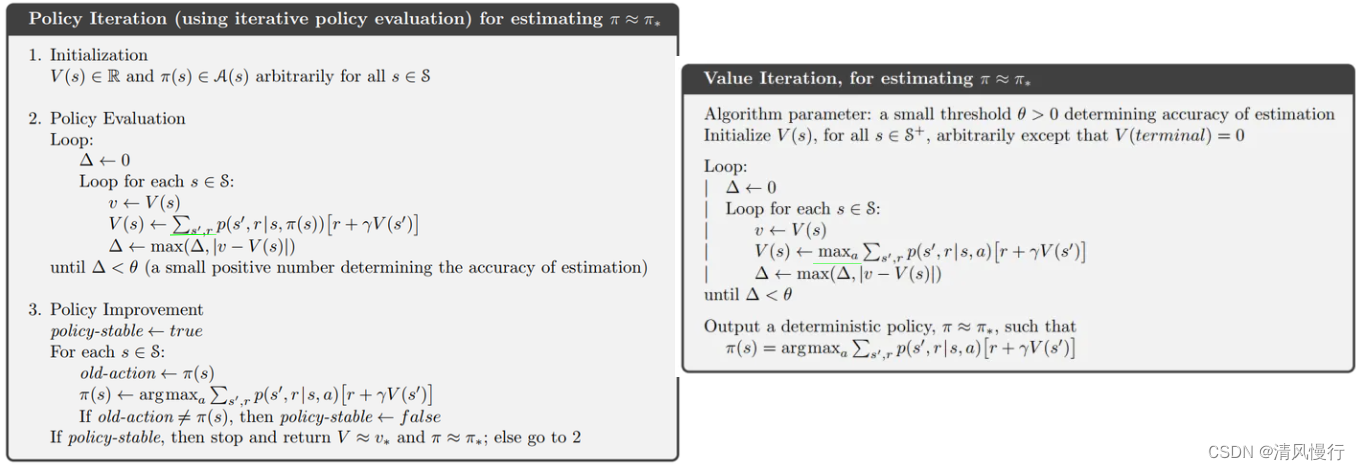
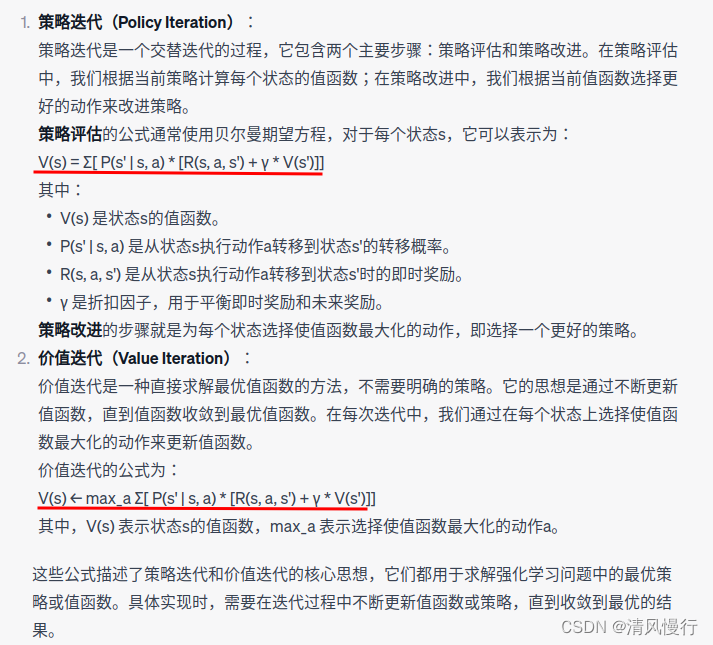
2.值迭代(Value Iteration)
通过迭代更新值函数来找到最优策略;用于寻找最优值函数(Value Function)和最优策略(Policy),从而找到在给定MDP中智能体可以采取的最优行动。
在值迭代中,智能体试图估计在每个状态下采取各种行动的长期累积奖励。值函数表示从某个状态开始,其后续决策中可以获得的预期累积奖励V(s)。
2.1过程
-
初始化:为MDP中的每个状态s,将值函数V(s)初始化为任意值,可以是零或者随机值。
-
迭代更新:重复以下步骤,直到值函数收敛(不再发生显著变化)为止:
-
a. 对于MDP中的每个状态s,计算V(s)的新值,即公式更新:
V(s) ← max [ R(s, a) + γ * Σ P(s' | s, a) * V(s') ]
a表示可能的行动,
R(s, a)是从状态s采取行动a的即时奖励,
P(s' | s, a)是从状态s采取行动a后转移到状态s'的概率,
γ是折扣因子(0 ≤ γ ≤ 1),用于平衡即时奖励和未来奖励的重要性。
-
b. 对于所有状态s,重复步骤a,直到值函数V(s)不再显著变化。
-
提取最优策略:在值函数收敛后,可以通过以下方法找到最优策略: 对于每个状态s,在所有可能的行动a中选择最大化更新后的值函数的行动,即: π*(s) = argmax [ R(s, a) + γ * Σ P(s' | s, a) * V(s') ]
2.2例子
2.2.1环境
考虑以下简化的格子世界,其中包含 4 个状态和 4 个动作:
状态空间 S = {s1, s2, s3, s4} 动作空间 A = {up, down, left, right}
-----------------
| s1 | s2 | s3 |
-----------------
| s4 | |
-----------------
每个格子的即时奖励如下:
-
R(s1, up, s1) = -1
-
R(s1, down, s4) = 10
-
R(s1, left, s1) = -1
-
R(s1, right, s2) = -1
-
R(s2, up, s2) = -1
-
R(s2, down, s2) = -1
-
R(s2, left, s1) = -1
-
R(s2, right, s3) = -1
-
R(s3, up, s3) = -1
-
R(s3, down, s3) = -1
-
R(s3, left, s2) = -1
-
R(s3, right, s3) = -1
-
R(s4, up, s1) = -1
-
R(s4, down, s4) = -1
-
R(s4, left, s4) = -1
-
R(s4, right, s4) = -1
折扣因子 γ 设置为 0.9。
初始化 初始化值函数 V(s) 为 0,对于所有状态 s ∈ S。
Iteration 1:
V(s1) = 0, V(s2) = 0, V(s3) = 0, V(s4) = 0
Q(s1, up) = -1 + 0.9 * V(s1) = -1 + 0.9 * 0 = -1
Q(s1, down) = 10 + 0.9 * V(s4) = 10 + 0.9 * 0 = 10
Q(s1, left) = -1 + 0.9 * V(s1) = -1 + 0.9 * 0 = -1
Q(s1, right) = -1 + 0.9 * V(s2) = -1 + 0.9 * 0 = -1
Q(s2, up) = -1 + 0.9 * V(s2) = -1 + 0.9 * 0 = -1
Q(s2, down) = -1 + 0.9 * V(s2) = -1 + 0.9 * 0 = -1
Q(s2, left) = -1 + 0.9 * V(s1) = -1 + 0.9 * 0 = -1
Q(s2, right) = -1 + 0.9 * V(s3) = -1 + 0.9 * 0 = -1
Q(s3, up) = -1 + 0.9 * V(s3) = -1 + 0.9 * 0 = -1
Q(s3, down) = -1 + 0.9 * V(s3) = -1 + 0.9 * 0 = -1
Q(s3, left) = -1 + 0.9 * V(s2) = -1 + 0.9 * 0 = -1
Q(s3, right) = -1 + 0.9 * V(s3) = -1 + 0.9 * 0 = -1
Q(s4, up) = -1 + 0.9 * V(s1) = -1 + 0.9 * 0 = -1
Q(s4, down) = -1 + 0.9 * V(s4) = -1 + 0.9 * 0 = -1
Q(s4, left) = -1 + 0.9 * V(s4) = -1 + 0.9 * 0 = -1
Q(s4, right) = -1 + 0.9 * V(s4) = -1 + 0.9 * 0 = -1
更新值函数 V(s): 取q(s,a)中最大
V(s1) = max(-1, 10, -1, -1) = 10 V(s2) = max(-1, -1, -1, -1) = -1 V(s3) = max(-1, -1, -1, -1) = -1 V(s4) = max(-1, -1, -1, -1) = -1
Iteration 2:
Q(s1, up) = -1 + 0.9 * V(s1) = -1 + 0.9 * 10 = 8.9 Q(s1, down) = 10 + 0.9 * V(s4) = 10 + 0.9 * (-1) = 9.1 Q(s1, left) = -1 + 0.9 * V(s1) = -1 + 0.9 * 10 = 8.9 Q(s1, right) = -1 + 0.9 * V(s2) = -1 + 0.9 * (-1) = -2 Q(s2, up) = -1 + 0.9 * V(s2) = -1 + 0.9 * (-1) = -1.9 Q(s2, down) = -1 + 0.9 * V(s2) = -1 + 0.9 * (-1) = -1.9 Q(s2, left) = -1 + 0.9 * V(s1) = -1 + 0.9 * 10 = 8.9 Q(s2, right) = -1 + 0.9 * V(s3) = -1 + 0.9 * (-1) = -2 Q(s3, up) = -1 + 0.9 * V(s3) = -1 + 0.9 * (-1) = -1.9 Q(s3, down) = -1 + 0.9 * V(s3) = -1 + 0.9 * (-1) = -1.9 Q(s3, left) = -1 + 0.9 * V(s2) = -1 + 0.9 * (-1) = -2 Q(s3, right) = -1 + 0.9 * V(s3) = -1 + 0.9 * (-1) = -1.9 Q(s4, up) = -1 + 0.9 * V(s1) = -1 + 0.9 * 10 = 8.9 Q(s4, down) = -1 + 0.9 * V(s4) = -1 + 0.9 * (-1) = -2 Q(s4, left) = -1 + 0.9 * V(s4) = -1 + 0.9 * (-1) = -2 Q(s4, right) = -1 + 0.9 * V(s4) = -1 + 0.9 * (-1) = -2 更新值函数 V(s):
V(s1) = max(8.9, 9.1, 8.9, -2) = 9.1
V(s2) = max(-1.9, -1.9, 8.9, -2) = 8.9
V(s3) = max(-1.9, -1.9, -2, -1.9) = -1.9
V(s4) = max(8.9, -2, -2, -2) = 8.9
Iteration 3:
Q(s1, up) = -1 + 0.9 * V(s1) = -1 + 0.9 * 9.1 = 8.19
Q(s1, down) = 10 + 0.9 * V(s4) = 10 + 0.9 * 8.9 = 18.01
Q(s1, left) = -1 + 0.9 * V(s1) = -1 + 0.9 * 9.1 = 8.19
Q(s1, right) = -1 + 0.9 * V(s2) = -1 + 0.9 * 8.9 = 7.01
Q(s2, up) = -1 + 0.9 * V(s2) = -1 + 0.9 * 8.9 = 7.01
Q(s2, down) = -1 + 0.9 * V(s2) = -1 + 0.9 * 8.9 = 7.01
Q(s2, left) = -1 + 0.9 * V(s1) = -1 + 0.9 * 9.1 = 8.19
Q(s2, right) = -1 + 0.9 * V(s3) = -1 + 0.9 * (-1.9) = -2.71
Q(s3, up) = -1 + 0.9 * V(s3) = -1 + 0.9 * (-1.9) = -2.71
Q(s3, down) = -1 + 0.9 * V(s3) = -1 + 0.9 * (-1.9) = -2.71
Q(s3, left) = -1 + 0.9 * V(s2) = -1 + 0.9 * 8.9 = 7.01
Q(s3, right) = -1 + 0.9 * V(s3) = -1 + 0.9 * (-1.9) = -2.71
Q(s4, up) = -1 + 0.9 * V(s1) = -1 + 0.9 * 9.1 = 8.19
Q(s4, down) = -1 + 0.9 * V(s4) = -1 + 0.9 * 8.9 = 7.01
Q(s4, left) = -1 + 0.9 * V(s4) = -1 + 0.9 * 8.9 = 7.01
Q(s4, right) = -1 + 0.9 * V(s4) = -1 + 0.9 * 8.9 = 7.01
更新值函数 V(s):
V(s1) = max(8.19, 18.01, 8.19, 7.01) = 18.01 V(s2) = max(7.01, 7.01, 8.19, -2.71) = 8.19 V(s3) = max(-2.71, -2.71, 7.01, -2.71) = 7.01 V(s4) = max(8.19, 7.01, 7.01, 7.01) = 8.19
2.2.2直到值函数收敛
值迭代算法会持续更新值函数,并在经过足够次数的迭代后,使值函数收敛到最优值函数。此时,我们可以根据最优值函数来确定最优策略。最优策略是选择使得 Q(s, a) 最大的动作 a。在这个例子中,我们不再继续迭代,并假设经过若干次迭代后,值函数已经收敛到最优值函数:
V*(s1) = 17.37
V*(s2) = 16.21
V*(s3) = 7.37
V*(s4) = 16.21
2.2.3得到最优策略 π*
π*(s1) = down π*(s2) = up π*(s3) = up π*(s4) = up
2.3缺点
值迭代是一种保证收敛到最优解的方法,但在大型状态空间上可能需要较多的迭代次数和计算资源。然而,一旦值函数收敛,它提供了MDP的最优策略,使得智能体可以在环境中做出最优决策。
- 策略迭代(Policy Iteration):通过交替进行策略评估和改进来找到最优策略。
- Q-learning:基于状态-动作对的价值函数,通过更新Q值逼近最优策略。
- SARSA:类似于Q-learning,但采用状态-动作-奖励-状态-动作(State-Action-Reward-State-Action)序列进行更新。
虽然DP是一种有效的方法,但它在大型状态空间上的计算复杂性可能会非常高。因此,在实际应用中,可能需要采用其他近似方法,如函数逼近和深度强化学习等。
3.策略迭代
策略迭代是一种经典的求解最优策略的方法。通过交替进行策略评估和策略改进来逐步改进策略,直至找到最优策略。
过程如下:
3.1策略评估(Policy Evaluation)
在策略评估阶段,根据当前的策略估计每个状态的值函数。值函数表示在当前策略下从每个状态开始,预期未来能够获得的累积奖励。策略评估使用 Bellman 方程来递归地更新每个状态的值函数,直到收敛为止。
V(s) = Σ[π(s, a) * Σ[P(s'|s, a) * (R(s, a, s') + γ * V(s'))]], 对所有状态 s ∈ S
需要反复更新值函数 V(s) 直到收敛。一种常用的更新方法是迭代式策略评估,其中在每次更新中,将新的值函数 V(s) 直接用于计算其他状态的值函数,直到所有状态的值函数都不再发生显著变化
3.2策略改进(Policy Improvement)
选择在每个状态下具有最大值函数的动作,更新策略,使得新的策略相对于旧策略更好。这样的更新策略的过程被称为“贪心”策略改进。
if a = argmax[Σ[P(s'|s, a) * (R(s, a, s') + γ * V(s'))]], 对所有动作 a ∈ A, π(s, a) = 1
else π(s, a) = 0
其中,argmax 表示选择使得括号中的值最大的动作 a。
我们更新策略 π(s, a) 后,可能会再次进行策略评估来估计新的值函数 V(s),然后再进行策略改进。这两个步骤会交替进行直到策略收敛到最优策略为止。
3.3终止条件检查
重复进行策略评估和策略改进,直到策略不再发生改变,即达到最优策略或收敛到局部最优。
3.4例子
环境
同上:状态空间 S = {s1, s2, s3, s4} 动作空间 A = {up, down, left, right}
-----------------
| s1 | s2 | s3 |
-----------------
| s4 | |
-----------------
每个格子的即时奖励如下:
-
R(s1, up, s1) = -1
-
R(s1, down, s4) = 10
-
R(s1, left, s1) = -1
-
R(s1, right, s2) = -1
-
R(s2, up, s2) = -1
-
R(s2, down, s2) = -1
-
R(s2, left, s1) = -1
-
R(s2, right, s3) = -1
-
R(s3, up, s3) = -1
-
R(s3, down, s3) = -1
-
R(s3, left, s2) = -1
-
R(s3, right, s3) = -1
-
R(s4, up, s1) = -1
-
R(s4, down, s4) = -1
-
R(s4, left, s4) = -1
-
R(s4, right, s4) = -1
折扣因子 γ 设置为 0.9。
Step 1: 初始化策略
随机初始化一个策略 π(s, a)
π(s1, up) = 0.25, π(s1, down) = 0.25, π(s1, left) = 0.25, π(s1, right) = 0.25
π(s2, up) = 0.25, π(s2, down) = 0.25, π(s2, left) = 0.25, π(s2, right) = 0.25
π(s3, up) = 0.25, π(s3, down) = 0.25, π(s3, left) = 0.25, π(s3, right) = 0.25
π(s4, up) = 0.25, π(s4, down) = 0.25, π(s4, left) = 0.25, π(s4, right) = 0.25
Step 2: 策略评估
对当前策略进行策略评估,计算每个状态的值函数 V(s)。
策略评估使用迭代式的 Bellman 期望方程来计算值函数 V(s)。
重复以下步骤直到值函数收敛:
Iterations:
- 计算该状态的值函数 V(s):
V(s1) = Σ[π(s1, a) * (R(s1, a, s') + γ * V(s'))]
= 0.25 * (R(s1, up, s1) + 0.9 * V(s1)) + 0.25 * (R(s1, down, s4) + 0.9 * V(s4)) +
0.25 * (R(s1, left, s1) + 0.9 * V(s1)) + 0.25 * (R(s1, right, s2) + 0.9 * V(s2))
= 0.25 * (-1 + 0.9 * V(s1)) + 0.25 * (10 + 0.9 * V(s4)) + 0.25 * (-1 + 0.9 * V(s1)) + 0.25 * (-1 + 0.9 * V(s2))
- V(s2) = 0.25 * (-1 + 0.9 * V(s2)) + 0.25 * (-1 + 0.9 * V(s2)) + 0.25 * (-1 + 0.9 * V(s1)) + 0.25 * (-1 + 0.9 * V(s3))
- V(s3) = 0.25 * (-1 + 0.9 * V(s3)) + 0.25 * (-1 + 0.9 * V(s3)) + 0.25 * (-1 + 0.9 * V(s2)) + 0.25 * (-1 + 0.9 * V(s3))
- V(s4) = 0.25 * (-1 + 0.9 * V(s1)) + 0.25 * (-1 + 0.9 * V(s4)) + 0.25 * (-1 + 0.9 * V(s4)) + 0.25 * (-1 + 0.9 * V(s4))
区别-------值迭代的函数: V(s) ← max [ R(s, a) + γ * Σ P(s' | s, a) * V(s') ] 重复以上步骤直到值函数收敛。假设经过若干次迭代后,值函数已经收敛,最终的值函数 V* 为: V*(s1) = 18.963 V*(s2) = 17.067 V*(s3) = 17.067 V*(s4) = 18.963
Step 3: 策略改进
- 对当前的值函数 V* 进行策略改进,更新策略 π(s, a) 使得 Q(s, a) 最大的动作 a。
π(s1, up) = argmax(Q(s1, up)),
π(s1, down) = argmax(Q(s1, down)),
π(s1, left) = argmax(Q(s1, left)),
π(s1, right) = argmax(Q(s1, right))
π(s2, up) = argmax(Q(s2, up)),
π(s2, down) = argmax(Q(s2, down)),
π(s2, left) = argmax(Q(s2, left)),
π(s2, right) = argmax(Q(s2, right))
π(s3, up) = argmax(Q(s3, up)),
π(s3, down) = argmax(Q(s3, down)),
π(s3, left) = argmax(Q(s3, left)),
π(s3, right) = argmax(Q(s3, right))
π(s4, up) = argmax(Q(s4, up)),
π(s4, down) = argmax(Q(s4, down)),
π(s4, left) = argmax(Q(s4, left)),
π(s4, right) = argmax(Q(s4, right))
根据最优策略进行更新后,新的策略为:
π*(s1, up) = 0, π*(s1, down) = 1, π*(s1, left) = 0, π*(s1, right) = 0
π*(s2, up) = 0, π*(s2, down) = 0, π*(s2, left) = 0, π*(s2, right) = 1
π*(s3, up) = 0, π*(s3, down) = 0, π*(s3, left) = 0, π*(s3, right) = 1
π*(s4, up) = 0, π*(s4, down) = 0, π*(s4, left) = 0, π*(s4, right) = 0
直到策略和值函数都收敛到最优。
4策略迭代VS值迭代
值迭代是直接通过逐步迭代计算值函数,然后从值函数中选择最优动作作为策略。策略迭代则在值迭代的基础上,进一步在每次迭代中进行策略的改进。策略迭代的优势在于即使在初始时,策略不是最优的,但随着交替迭代,策略逐渐收敛到最优策略。
1. 策略迭代(Policy Iteration):策略迭代是一种模型基于的方法,它交替进行策略评估和策略改进来找到最优策略。主要优点是在有限步骤内保证收敛到最优策略。每个策略迭代步骤都会增加策略的质量,直到最优策略被找到。
2. 值迭代(Value Iteration):https://v5.bootcss.com/docs/getting-started/introduction/值迭代的主要优点是它通常比策略迭代更高效。因为值迭代直接更新值函数,并在一步中同时完成了策略改进的步骤,因此它通常比策略迭代收敛更快。
区别总结:
- 策略迭代是通过交替进行策略评估和策略改进来找到最优策略,而值迭代是通过直接迭代更新值函数来找到最优值函数和最优策略。
- 策略迭代保证收敛到最优策略,每个步骤增加策略的质量,而值迭代通过一步更新即可直接收敛到最优值函数和最优策略。
- 值迭代通常比策略迭代更高效,因为它可以在一步中完成策略改进的过程。但在每个迭代步骤中,值迭代需要遍历所有状态和动作来更新值函数,可能在状态空间较大时计算代价较高。















 278
278











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









