







MPU6050的工作过程
MPU6050 IMU在单芯片上集成了一个3轴加速度计和一个3轴陀螺仪。陀螺仪沿X、Y和Z轴测量角位置随时间的旋转速度或变化率。它使用MEMS技术和科里奥利效应进行测量。陀螺仪的输出以每秒度数为单位,因此为了获得角度位置,我们只需要对角速度进行积分。另一方面,MPU6050加速度计测量加速度的方式与ADXL345加速度传感器相同。简而言之,它可以测量沿3个轴的重力加速度,并使用一些三角学数学,我们可以计算传感器定位的角度。因此,如果我们融合或组合加速度计和陀螺仪数据,我们可以获得有关传感器方向的非常准确的信息。MPU6050 IMU也称为六轴运动跟踪设备或6 DoF(六自由度)设备,因为它有6个输出,即3个加速度计输出和3个陀螺仪输出。
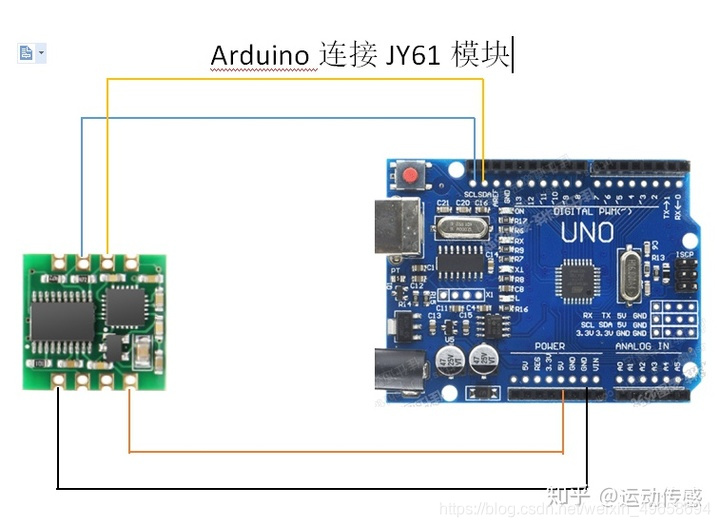
Arduino和MPU6050的连接方法
我们来看看如何使用Arduino连接和读取MPU6050传感器的数据。我们使用I2C协议与Arduino进行通信,因此只需要两条线进行连接,另外还有两条线用于供电。
MPU6050的Arduino代码


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









