






对于点云的处理,传统的工具可能是PCL,9.3k的github stars,纯c++的接口。但是随着open3d的问世,大家可以使用python直接对点云进行处理,操作简单,深受大家的喜欢,目前已经10.3k stars,已经超越了PCL,成为了最受欢迎的工具。这篇文章记录一下我使用open3d的代码,供大家参考。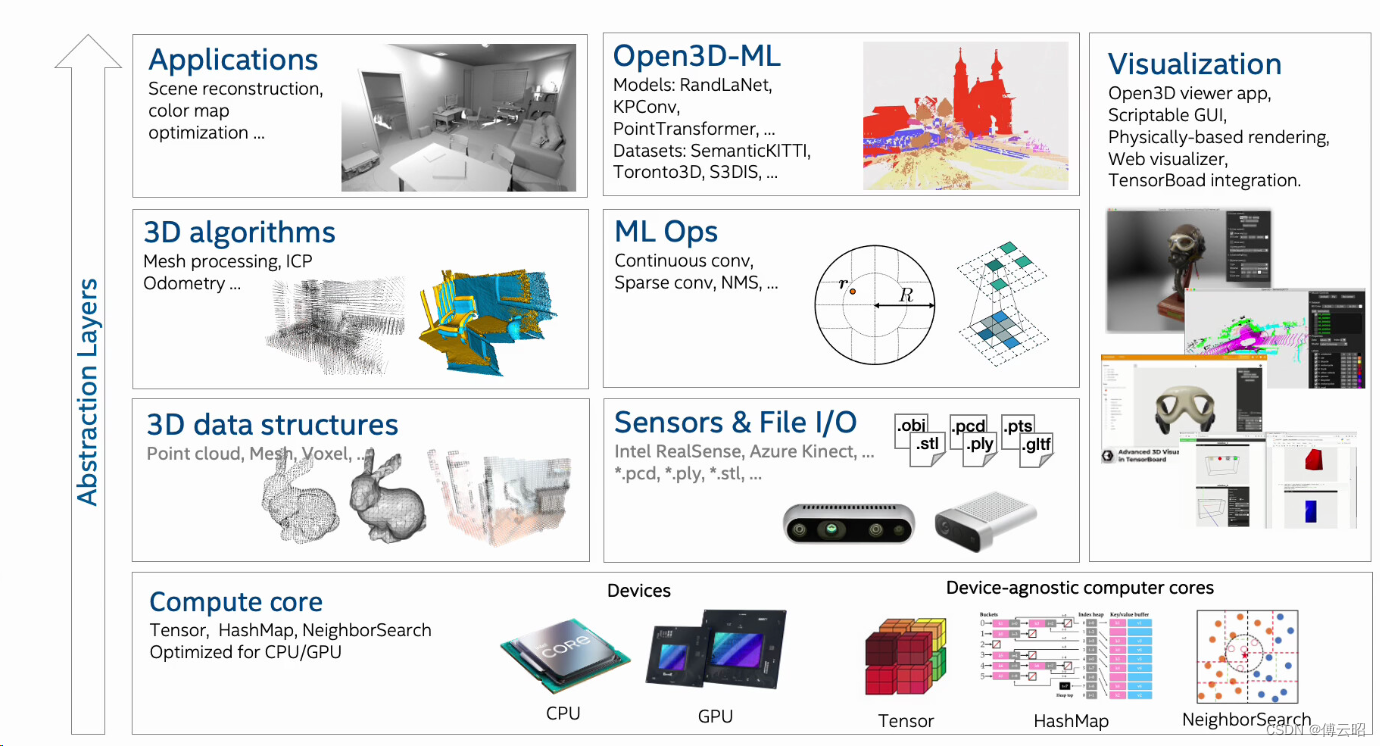
官网:
isl-org/Open3D: Open3D: A Modern Library for 3D Data Processing (github.com)
安装:
pip install open3d
官方文档:Open3D 0.18.0 documentation
主要内容:点云的读取和保存,rgb+depth的读取和转点云,点云的下采样,法向量估计,numpy和点云的转换,点云裁剪,可视化,分割平面算法,关键点提取,icp配准,聚类算法,边缘点提取,基于法向量的下采样,ppf配准等。
1.读取点云
model_pcd = o3d.io.read_point_cloud(path) # 单位是米,值在[0,1]之间
model_points_array = np.array(model_pcd.points)
2.读dep,dep 2 pcd
pth = open(args.scene, 'rb') # 我们的场景不是ply,是depth,把深度图转化为带法向量的点云、
depth_array = np.array(pickle.load(pth))
depth = o3d.geometry.Image(depth_array)
intrinsic = o3d.camera.PinholeCameraIntrinsic(width=depth_array.shape[1], height=depth_array.shape[0],
fx=616.58, fy=616.778, cx=323.103,cy=238.464)
depth_pcd = o3d.geometry.PointCloud.create_from_depth_image(depth, intrinsic, depth_scale=1000, depth_trunc=1000.0) # depth_scale=1000后单位也是米
# depth_pcd.estimate_normals(search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.1, max_nn=30))
color0 = [0,0,1]
depth_pcd.paint_uniform_color(color0)
3.对点云体素下采样 &&估计法向量
up_points = model_points_array * 1000 # 单位 毫米
model_pcd = o3d.geometry.PointCloud(o3d.utility.Vector3dVector(up_points))
model_pcd.estimate_normals(
search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=100, max_nn=30)) # 调节参数半径和邻居数量,根据单位
model_down_pcd = model_pcd.voxel_down_sample(voxel_size=8) # 需要手动设置参数,保证下采样后的点云比较好的而保留了原始特征
downpcd_farthest = pcd.farthest_point_down_sample(500)
4.numpy转03d 点云
transformed_model_pcd = o3d.geometry.PointCloud(o3d.utility.Vector3dVector(transformed_model))
pcd_ary = np.array(transformed_model_pcd.points)
5.点云裁剪
cropped_pcd = depth_pcd.crop(o3d.geometry.AxisAlignedBoundingBox(min_bound=np.min(transformed_bbox, axis=0),
max_bound=np.max(transformed_bbox, axis=0)))
6.可视化
o3d.visualization.draw_geometries([transformed_model_pcd, cropped_pcd])
7.执行平面分割
plane_model, inliers = downpcd_farthest.segment_plane(distance_threshold=0.01, ransac_n=3, num_iterations=1000)
# 获取平面的参数
[a, b, c, d] = plane_model
# 根据平面参数筛选点云
obj_pcd = downpcd_farthest.select_by_index(inliers, invert=True)
boundarys, mask = obj_pcd.compute_boundary_points(0.1) # 中间值最好,输入点云越少越好
8.iss关键点提取
keypoints = o3d.geometry.keypoint.compute_iss_keypoints(pcd)
9.icp
source = model_down_pcd
target = cropped_down_pcd
trans_init = np.vstack((np.hstack((r, t.reshape(-1, 1))), np.array([0, 0, 0, 1])))
threshold = 0.002 # 肥皂+笔:0.002
# point-to-plane ICP
reg_p2p = o3d.pipelines.registration.registration_icp(
source, target, threshold, trans_init,
# TransformationEstimationPointToPlane,TransformationEstimationPointToPoint(),TransformationEstimationForGeneralizedICP,TransformationEstimationForColoredICP
o3d.pipelines.registration.TransformationEstimationPointToPlane(),
o3d.pipelines.registration.ICPConvergenceCriteria(max_iteration=5000))
10.聚类
# 聚类, 保留点数最多的哪个类作为目标
with o3d.utility.VerbosityContextManager(o3d.utility.VerbosityLevel.Debug) as cm:
# eps表示聚类的领域距离,min_points表示聚类的最小点数。该函数返回一个label,其中label为-1表示为噪声。0应该时背景, 结果和半径有关
labels = np.array(scene_cropped_down_pcd.cluster_dbscan(eps=0.01, min_points=20, print_progress=True))
points_array = np.array(scene_cropped_down_pcd.points)
points_array[labels < 0] = 0
cls_id_list = np.unique(labels[labels >= 0])
cls_pcd_num = {}
for i, cls_id in enumerate(cls_id_list): # i 从0开始
cls_i_pcd = points_array[labels == cls_id ]
cls_pcd_num[cls_id] = len(cls_i_pcd)
cls_id = max(cls_pcd_num,key=cls_pcd_num.get)
aim_pcd = points_array[labels == cls_id]
11.边缘点提取
def extract_scene_edge_points(model_pcd):
pcd = o3d.t.geometry.PointCloud.from_legacy(model_pcd, o3c.float64)
downpcd_farthest = pcd.farthest_point_down_sample(5000)
downpcd_farthest.estimate_normals(max_nn=30, radius=100)
# 执行平面分割
plane_model, inliers = downpcd_farthest.segment_plane(distance_threshold=0.01, ransac_n=3, num_iterations=1000)
# 获取平面的参数
[a, b, c, d] = plane_model
# 根据平面参数筛选点云
obj_pcd = downpcd_farthest.select_by_index(inliers, invert=True)
# o3d.visualization.draw_geometries([obj_pcd.to_legacy()])
boundarys, mask = obj_pcd.compute_boundary_points(0.1) # 中间值最好,输入点云越少越好
# TODO: not good to get size of points.
# print(f"Detect {boundarys.point.positions.shape[0]} bnoundary points from {pcd.point.positions.shape[0]} points.")
# print("检测后的点云数量", len(boundarys.point.positions))
# boundarys = boundarys.paint_uniform_color([1.0, 0.0, 0.0])
# o3d.visualization.draw_geometries([boundarys.to_legacy()])
# 把6个面的轮廓点云拼接在一起返回一个边缘特征的模型然后计算ppf
boundarys = boundarys.to_legacy()
o3d.visualization.draw_geometries([boundarys])
return boundarys
def pcd_normals_downsample(points, normals, radius, threshold):
kdtree = KDTree(points)
downsampled_points = []
downsampled_normals = []
for i in range(len(points)):
query_result = kdtree.query_ball_point(points[i], radius)
if len(query_result) > 1:
neighbor_normals = normals[query_result[1:]] # 去除自身点
normal_diff = np.linalg.norm(normals[i] - neighbor_normals, axis=1)
if np.max(normal_diff) > threshold:
downsampled_points.append(points[i])
downsampled_normals.append(normals[i])
down_pcd = o3d.geometry.PointCloud()
down_pcd.points = o3d.utility.Vector3dVector(downsampled_points)
down_pcd.normals = o3d.utility.Vector3dVector(downsampled_normals)
print(len(np.array(down_pcd.points)))
if len(np.array(down_pcd.points)) > 50000:
down_pcd = down_pcd.farthest_point_down_sample(50000)
return down_pcd
def paxini_ppf_icp(model, scene, visual=False):
"model,scene是ndarray,n*6(xyz,nxnynz)"
N = 1
print('-----------Training-----------')
# 第一个参数:0.025:相对采样步长, 第二个:0.05:表示相对距离步长。这个参数用于决定匹配点对时的距离步长。设置为0.05且模型直径为1m(1000mm),则从对象表面采样的点将相距约50 mm
detector = cv.ppf_match_3d_PPF3DDetector(0.0025, 0.005)
detector.trainModel(model)
print('-----------Matching-----------')
results = detector.match(scene, 1.0 / 40.0, 0.05) # 参数1.0/40.0是匹配阈值,用于控制匹配的松紧程度。参数0.05是ICP阈值,用于滤除不可靠的匹配结果。
print('-----------ICP-----------')
icp = cv.ppf_match_3d_ICP(100) # icp 100次
_, results = icp.registerModelToScene(model, scene, results[:N]) # 这里结果取了前N个
result = results[0] # 第一个是vote点最多的pose
print("-- Pose to Model Index %d: NumVotes = %d, Residual = %f\n%s\n" % (
result.modelIndex, result.numVotes, result.residual, result.pose))
# 可视化
if visual == True:
trans_model = np.dot(model[:, :3], result.pose[:3, :3].T) + result.pose[:3, 3]
trans_model = o3d.geometry.PointCloud(o3d.utility.Vector3dVector(trans_model))
scene_pcd = o3d.geometry.PointCloud(o3d.utility.Vector3dVector(scene[:, :3]))
trans_model.paint_uniform_color([1, 0, 0])
scene_pcd.paint_uniform_color([0, 0, 1])
o3d.visualization.draw_geometries([trans_model, scene_pcd])
return result














 2094
2094











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









