







运行效果描述:
电脑摄像头打开后,识别摄像头中的手势,进而控制小车的运行状态。
麦轮小车
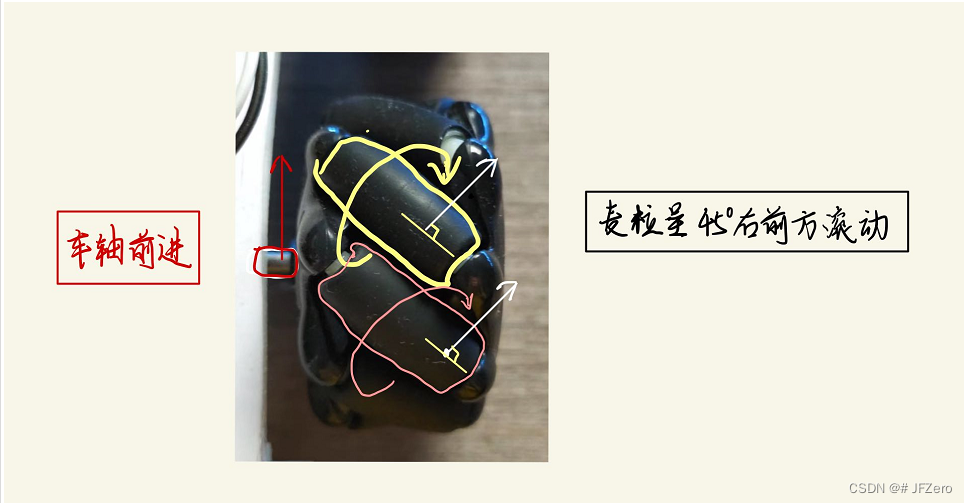
麦轮特点:麦轮上装置一圈倾斜的麦粒,每一颗麦粒都是松动的。
当车轴上的电机向前转动时,整个麦轮的运动方向会与麦粒呈直角,如图:
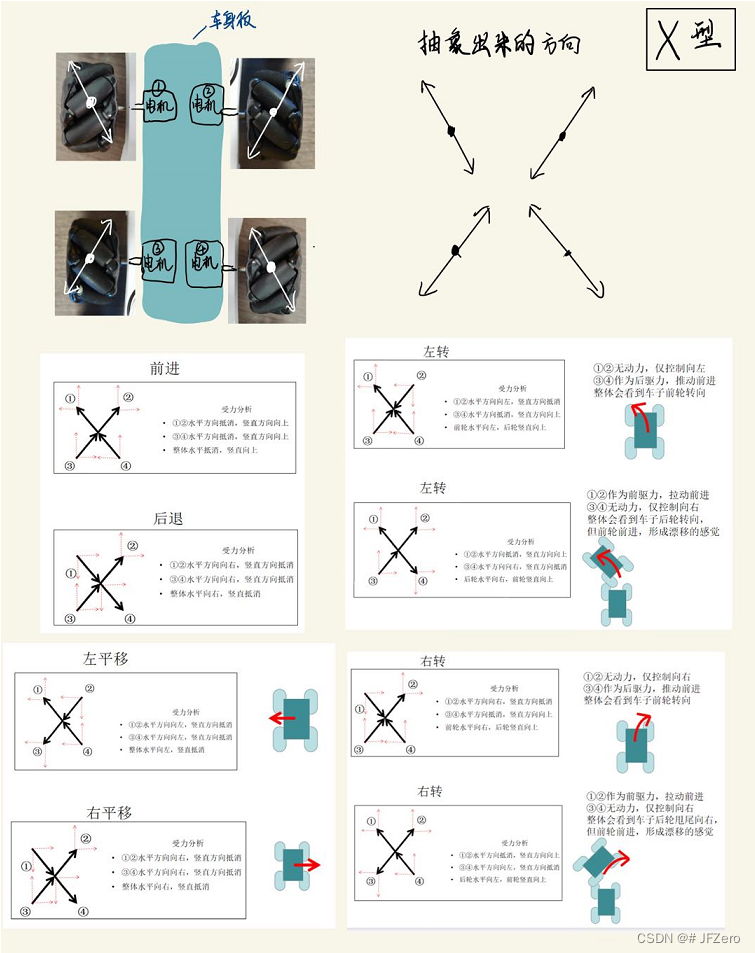
由此设计一辆四个麦轮组成的小车如图
特别要注意:麦轮安装的方向也会决定车的转动效果及方向
整车运动状态,可分为前进、后退、左转、右转、左平移、右平移、停止
下面有两种不同的麦轮安装方式,并呈现不同的车轮转动效果图
- 方式一:X型,即四个麦轮的方向是呈X型,有点儿像外八。
- 方式二:囧型,有点儿像内八。
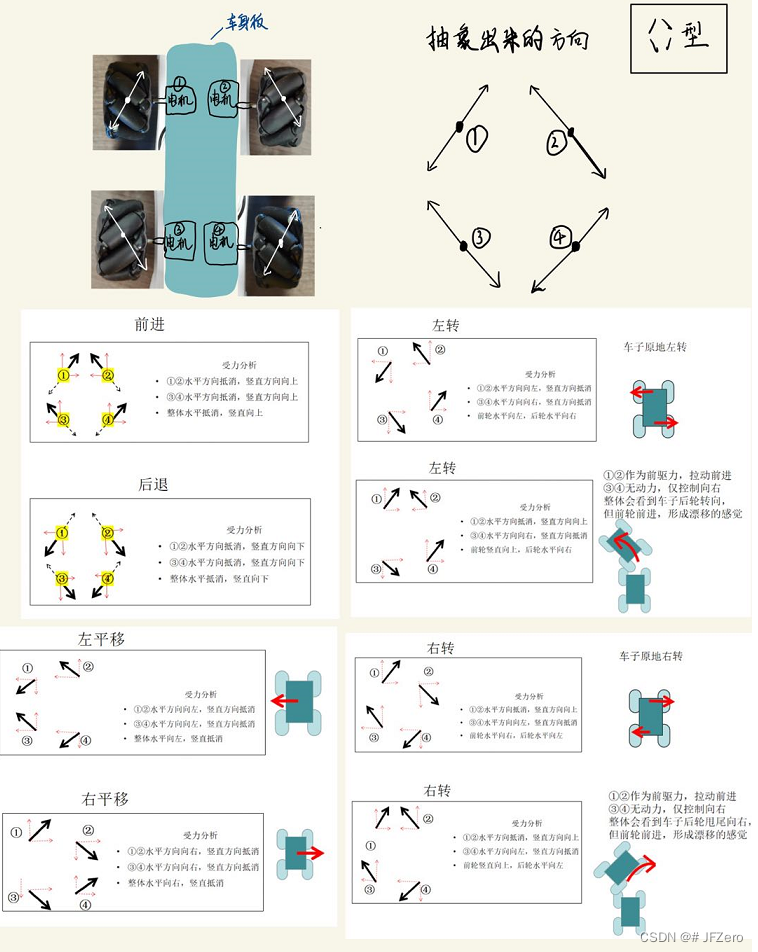
这两种麦轮安装方式,在实现效果上有个很大的差距:X型的左转或右转,可以实现前轮转向,后轮驱动的偏真实汽车转向效果。而囧型的左转或右转,可以实现前后轮水平反向,即实现原地转弯的效果。——无优劣之分,看个人喜好。(列出两种的原因是:我画错图了,但画错也能用…)
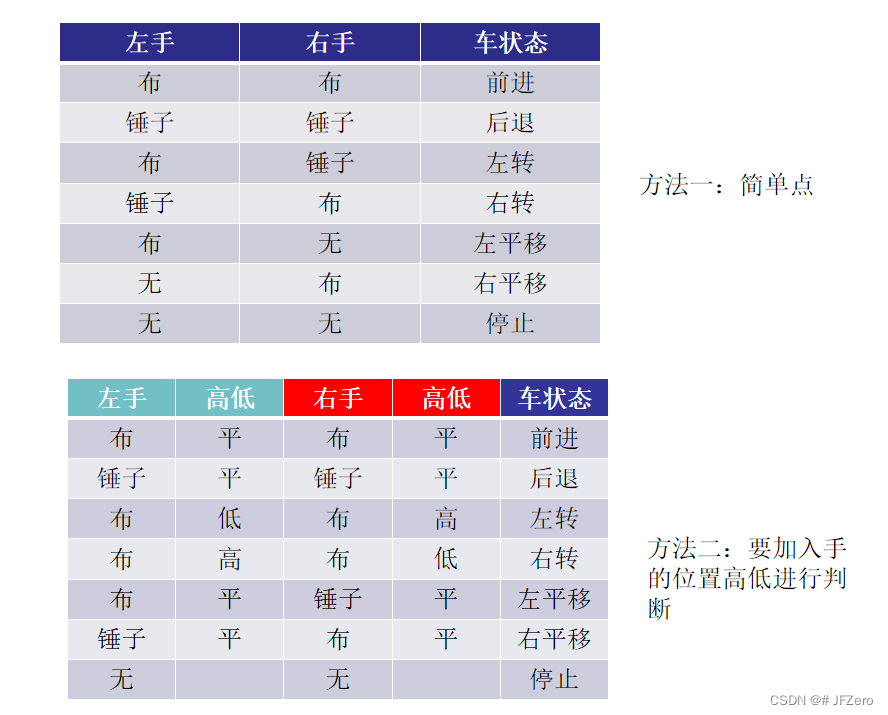
手势与小车的对应控制
小车有7种运动状态:前进、后退、左转、右转、左平移、右平移、停止
而我们人有两只手,可以使用锤子和布,完成7种状态的控制。
硬件电路连接
- 树莓派主控板
- 电机驱动①
- 电机驱动②
- 四个电机
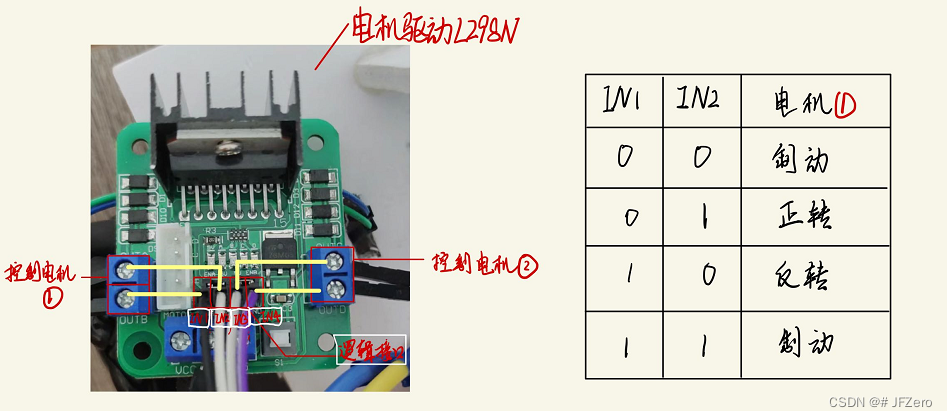
1、首先是电机驱动与电机的连接控制
电机驱动选择L298N,可连接两个直流电机。但L298N的电压最高可达36V,电流可达4A(人体安全电压36V,这是为了安全设计吧)
要注意电机的可承载电压电流,避免烧坏。
电机驱动上的IN1,IN2可控制一个电机,IN3,IN4控制另外一个电机
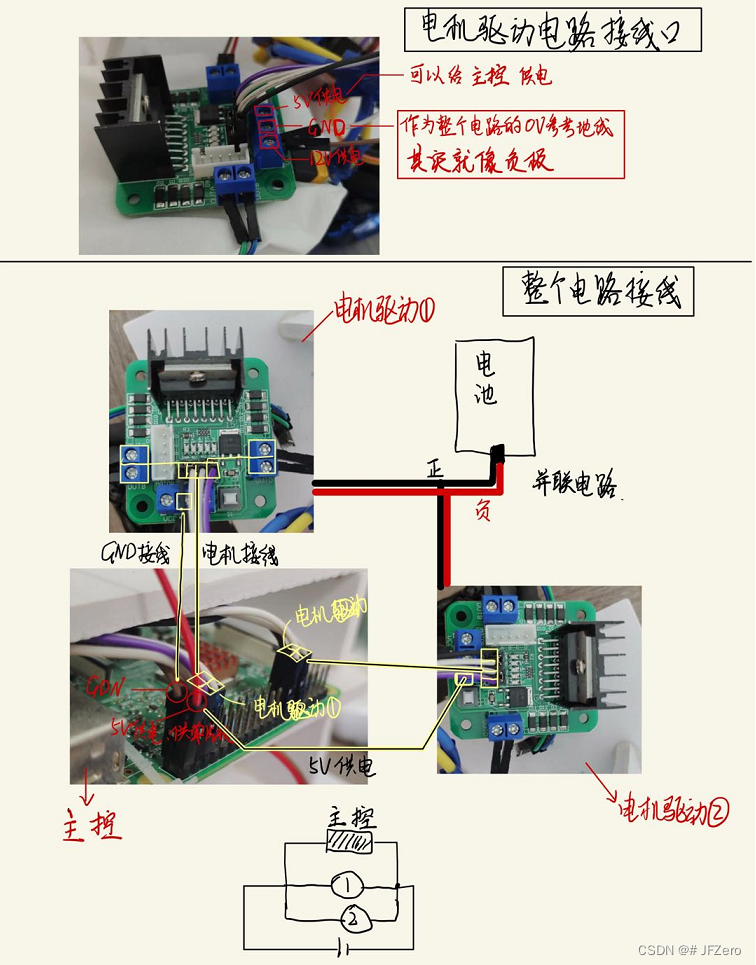
2、电源、电机驱动、树莓派主控板的电路连接
树莓派主控板、电机驱动都是需要5V的电压,那么可以通过并联的方式完成
其中,树莓派主控板的接线可以从其中一个电机驱动完成,即在驱动的 5V接线口(正极)与GND接线(负极)
而电源引出两个线(正负极),直接与俩电机驱动并联。
而每个电机驱动上都有4个逻辑引脚与树莓派主控板进行连接。
软件部分的数据传输、手势识别与判断等
作业不会写,抄的时候就要更认真了

















 501
501

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









