







 本文介绍了微程序控制器中微指令的两种主要编码方式——水平型和垂直型。水平型微指令字长较长,能产生多个并行微命令,但效率低;垂直型微指令字长短,操作并行性低,但需译码。还讨论了直接控制法、最短编码法、字段直接编码和字段间接编码等常见的微指令编码方法及其优缺点。
本文介绍了微程序控制器中微指令的两种主要编码方式——水平型和垂直型。水平型微指令字长较长,能产生多个并行微命令,但效率低;垂直型微指令字长短,操作并行性低,但需译码。还讨论了直接控制法、最短编码法、字段直接编码和字段间接编码等常见的微指令编码方法及其优缺点。
微程序控制器–微指令编码方式
水平型微指令
微指令的字长比较长在一条微指令中可以产生较多的微命令操作的并行性较高
垂直型微指令
微指令的字长比较短操作的并行性不高微程序比水平型的要长
微程序控制器–常用的微指令编码方法
1.直接控制法(不译法)
微指令操作控制字段的每一位都直接表示一个微命令,该位为“1”,表示执行这个微命令。
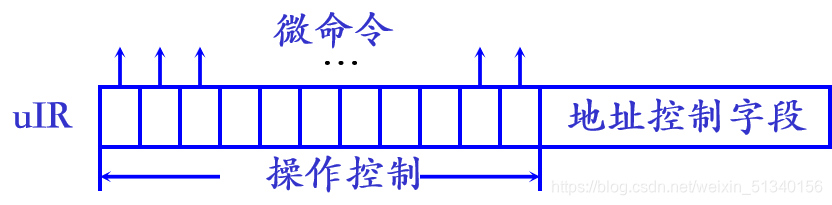
优点:结构简单,并行性强,无需译码,速度快。
缺点:微指令字太长,信息效率低。
特点:直观、硬件实现简单,执行速度快,具有高度的并行操作能力。
编码效率低,微指令字长很长,对控存容量的需求较大,不经济,缺乏实用价值。
***典型的水平型微指令***
2.最短编码法
将所有的微命令进行统一编码,每条微指令只定义一个微命令。若微命令总数为N,则最短编码法中操作控制字段的长度L,应满足:L≥log2N
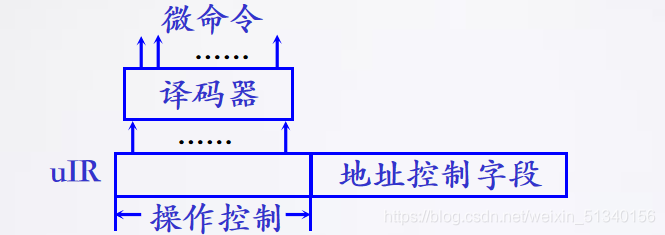
优点:使微指令字长大大缩短
缺点:需译码,各微命令不能并行,使微程序很长
***典型的垂直型微指令***
3. 字段直接编码法
将微指令操作控制字段划分为若干个子字段,每个子字段内的所有微命令进行统一编码。
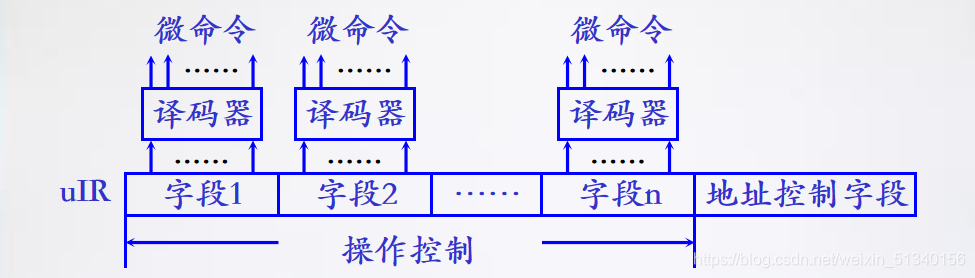
子字段划分的主要原则:
① 把互斥的微命令划分在同一字段内,如存储器的读和写。相容的微命令划分在不同字段内,如ALU和存储器之间的微命令。
② 一般每个子字段应留出一个编码状态,表示本字段不发任何微命令。(参考计算机操作系统的控制信号)
③每个子字段所定义的微命令数不宜太多,否则将使微命令译码复杂。
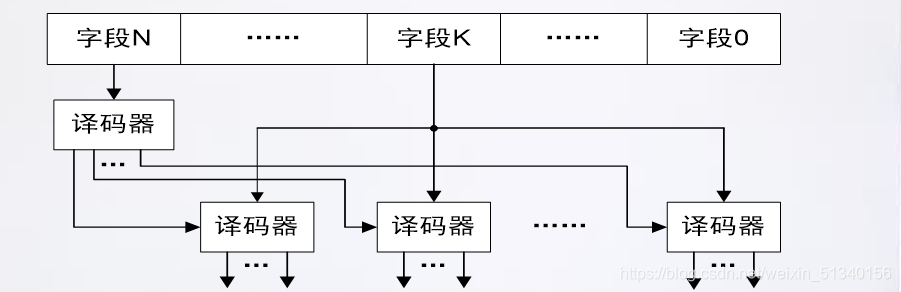
4.字段间接编码方式
微命令的产生并不是直接从一个字段译码得到,而是需要另一个字段的编码加以解释 。
有效地压缩了微指令字长,不仅组内的微命令是相斥的,组与组之间也成为互斥的,降低了微指令的并行操作能力,接近于垂直型微指令格式。 (类似计算机操作系统的多生产着,多消费者问题)

















 1389
1389

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









