







feather map的理解 在cnn的每个卷积层,数据都是以三维形式存在的。你可以把它看成许多个二维图片叠在一起(像豆腐皮一样),其中每一个称为一个feature map。
feather map 是怎么生成的? 输入层:在输入层,如果是灰度图片,那就只有一个feature map;如果是彩色图片,一般就是3个feature map(红绿蓝)。
其它层:层与层之间会有若干个卷积核(kernel)(也称为过滤器),上一层每个feature map跟每个卷积核做卷积,都会产生下一层的一个feature map,有N个卷积核,下层就会产生N个feather map。
多个feather map的作用是什么? 在卷积神经网络中,我们希望用一个网络模拟视觉通路的特性,分层的概念是自底向上构造简单到复杂的神经元。楼主关心的是同一层,那就说说同一层。 我们希望构造一组基,这组基能够形成对于一个事物完备的描述,例如描述一个人时我们通过描述身高/体重/相貌等,在卷积网中也是如此。在同一层,我们希望得到对于一张图片多种角度的描述,具体来讲就是用多种不同的卷积核对图像进行卷,得到不同核(这里的核可以理解为描述)上的响应,作为图像的特征。他们的联系在于形成图像在同一层次不同基上的描述。
下层的核主要是一些简单的边缘检测器(也可以理解为生理学上的simple cell)。
上层的核主要是一些简单核的叠加(或者用其他词更贴切),可以理解为complex cell。
多少个Feature Map?真的不好说,简单问题少,复杂问题多,但是自底向上一般是核的数量在逐渐变多(当然也有例外,如Alexnet),主要靠经验。
卷积核的理解 卷积核在有的文档里也称为过滤器(filter):
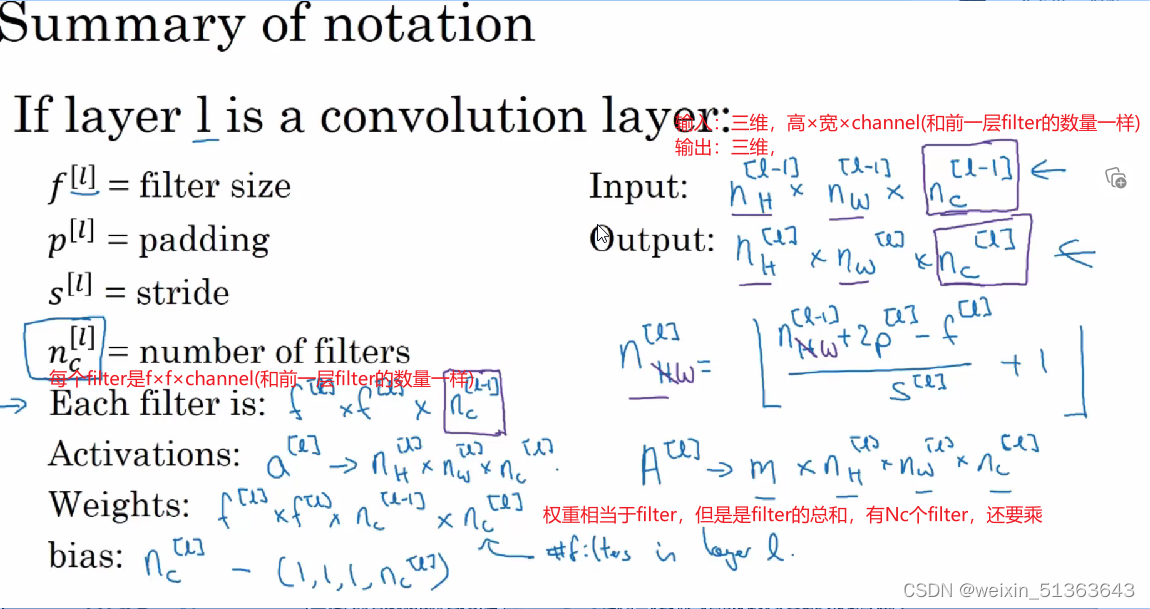
每个卷积核具有长宽深三个维度; 在某个卷积层中,可以有多个卷积核:下一层需要多少个feather map,本层就需要多少个卷积核。 卷积核的形状 每个卷积核具有长、宽、深三个维度。在CNN的一个卷积层中:
卷积核的长、宽都是人为指定的,长X宽也被称为卷积核的尺寸,常用的尺寸为3X3,5X5等; 卷积核的深度与当前图像的深度(feather map的张数)相同,所以指定卷积核时,只需指定其长和宽 两个参数。例如,在原始图像层 (输入层),如果图像是灰度图像,其feather map数量为1,则卷积核的深度也就是1;如果图像是grb图像,其feather map数量为3,则卷积核的深度也就是3.
卷积核个数的理解 如下图红线所示:该层卷积核的个数,有多少个卷积核,经过卷积就会产生多少个feature map,也就是下图中 豆腐皮儿的层数、同时也是下图豆腐块的深度(宽度)!!这个宽度可以手动指定,一般网络越深的地方这个值越大,因为随着网络的加深,feature map的长宽尺寸缩小,本卷积层的每个map提取的特征越具有代表性(精华部分),所以后一层卷积层需要增加feature map的数量,才能更充分的提取出前一层的特征,一般是成倍增加(不过具体论文会根据实验情况具体设置)!
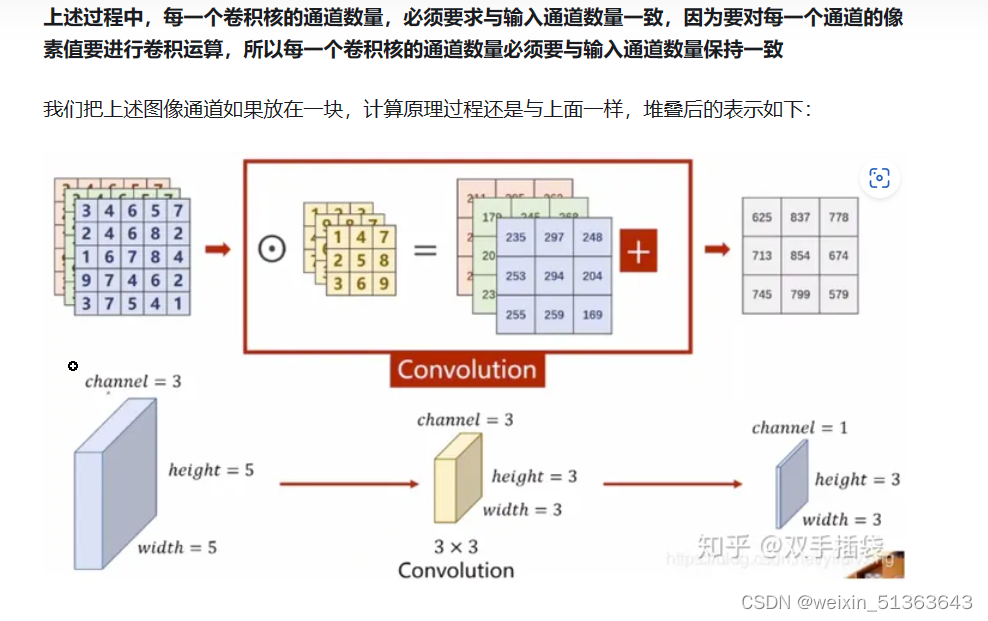
多通道卷积,但卷积核只有一个
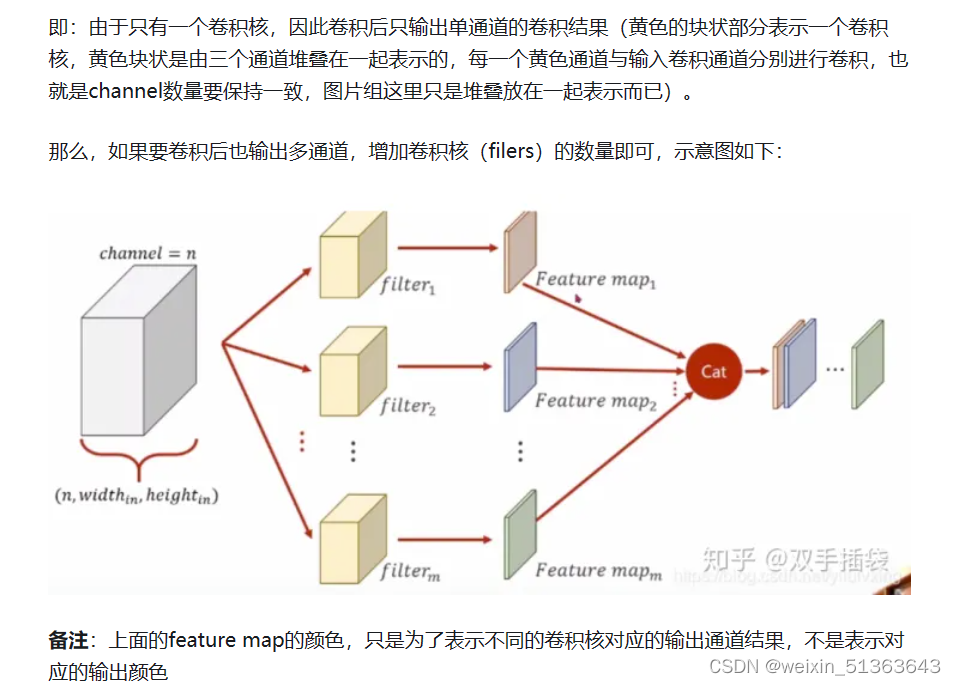
多通道卷积,卷积核数量多个
filter的理解 filter有两种理解:
在有的文档中,一个filter等同于一个卷积核:只是指定了卷积核的长宽深;
而有的情况(例如tensorflow等框架中,filter参数通常指定了卷积核的长、宽、深、个数四个参数),filter包含了卷积核形状和卷积核数量的概念:即filter既指定了卷积核的长宽深,也指定了卷积核的数量。
参考链接:https://blog.csdn.net/xys430381_1/article/details/82529397
filter大小一般是奇数。
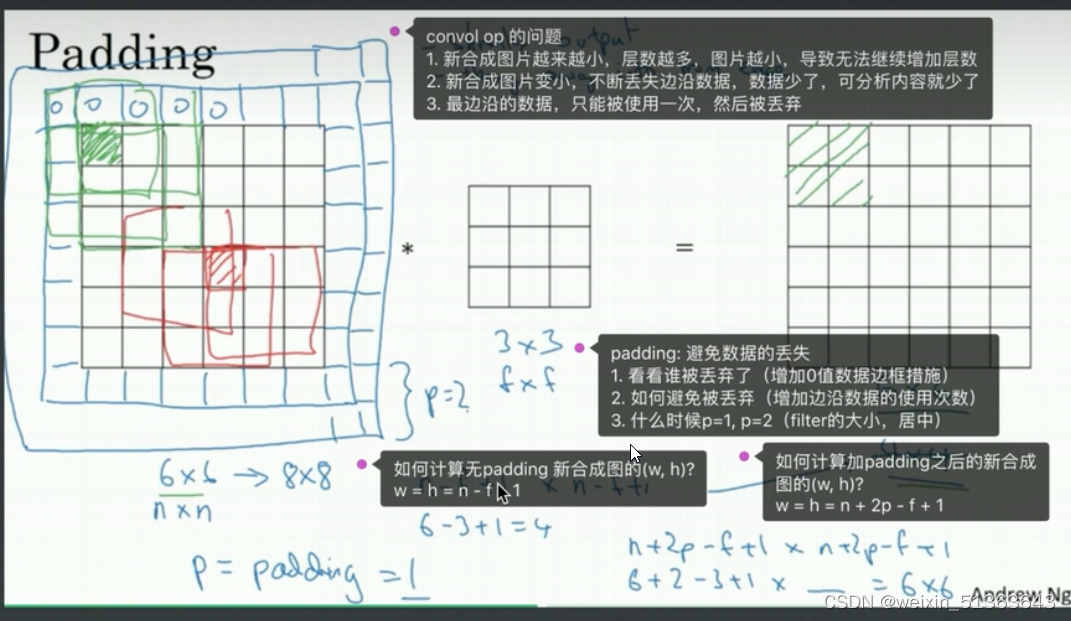
padding
默认stride=1
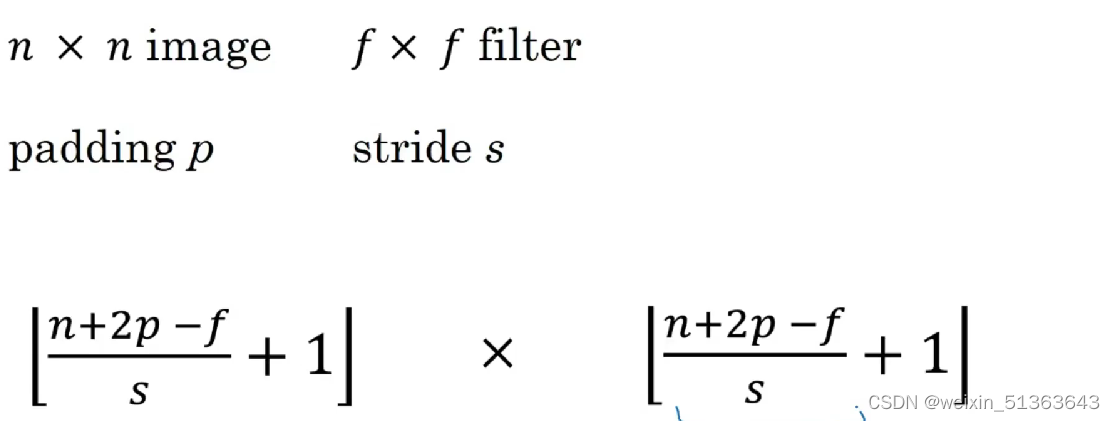
same convolution:当使用padding时,新产生的结果的大小:

valid convolution:当没有使用的时候是:(n-f+1)(n-f+1)
步幅stride
当使用padding(p),设置stride时,结果:(n+2p-f)/s+1 向下取整
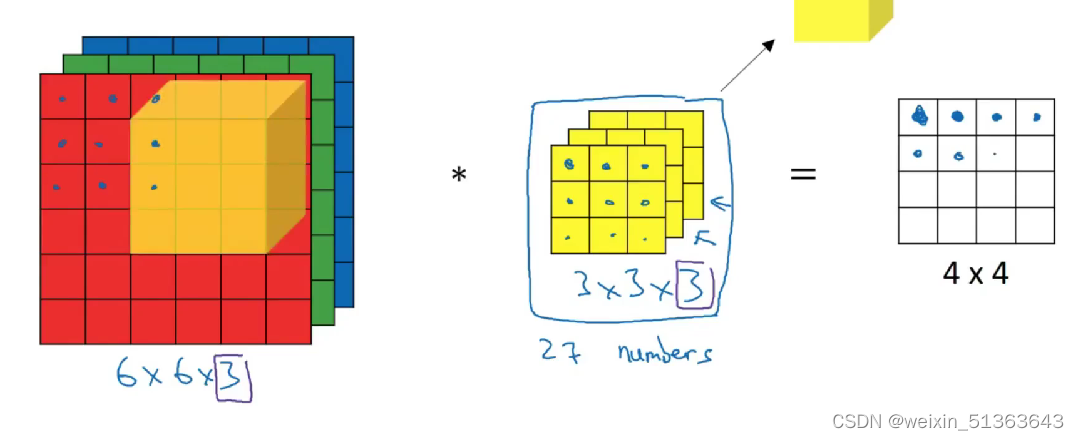
三维卷积的结果:(结合上面的filter理解应该能看懂)
1×1卷积
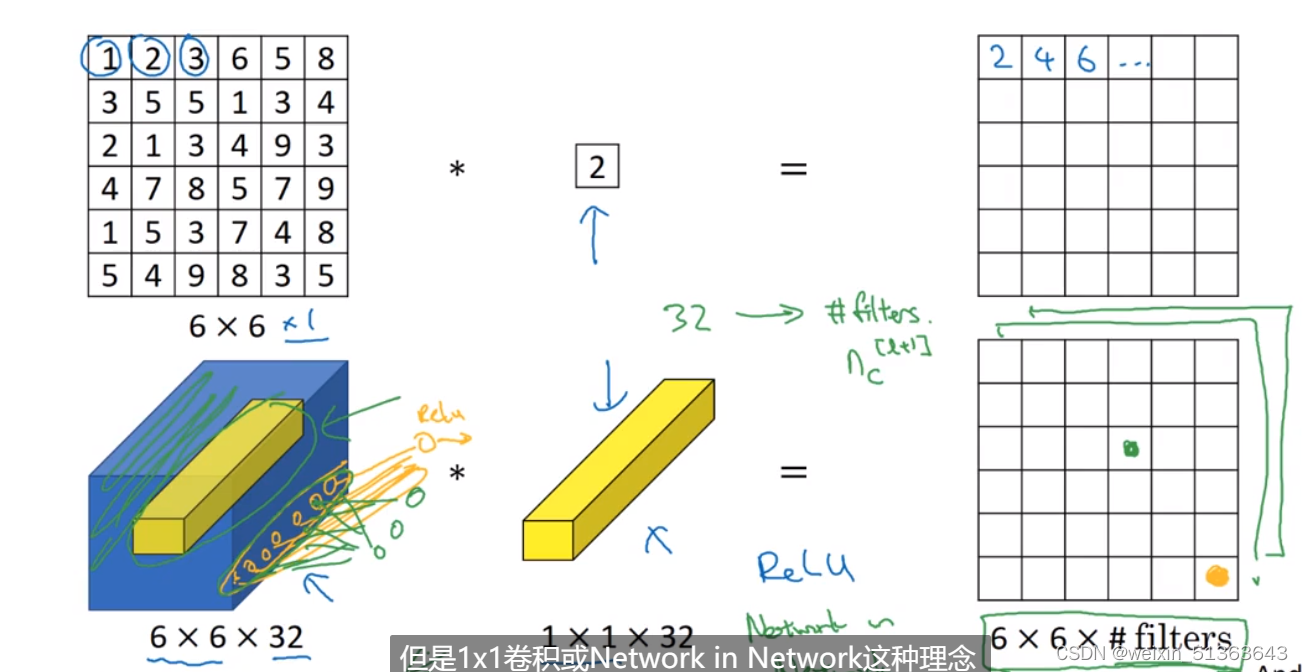
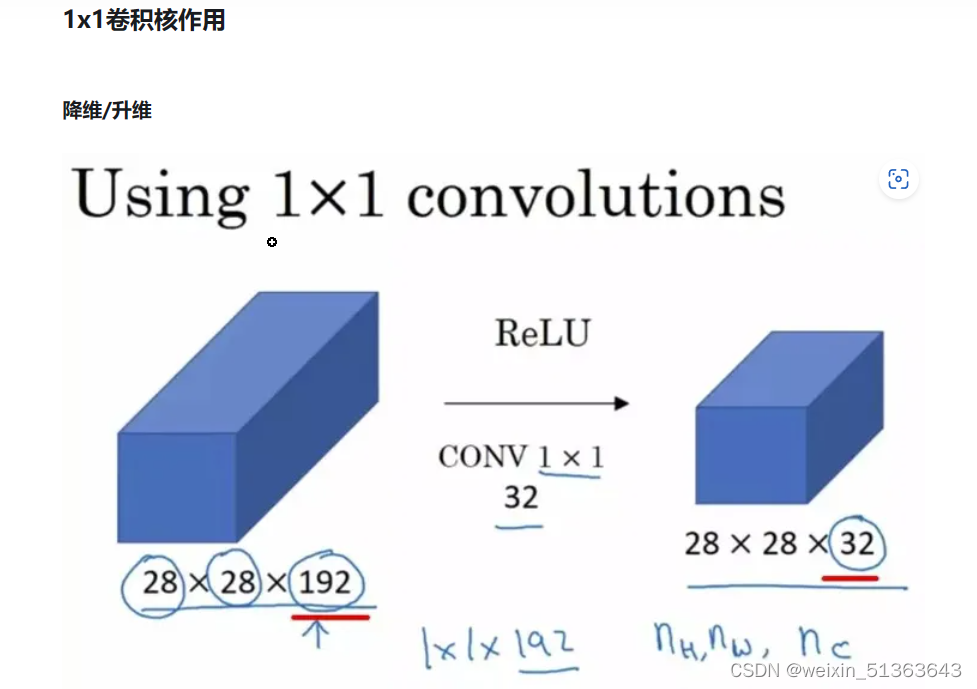
same卷积是有损降维,1×1卷积是无损降维
在Inception和ResNet中都有应用。
一文读懂卷积神经网络中的1x1卷积核 - 知乎 (zhihu.com)
Pooling
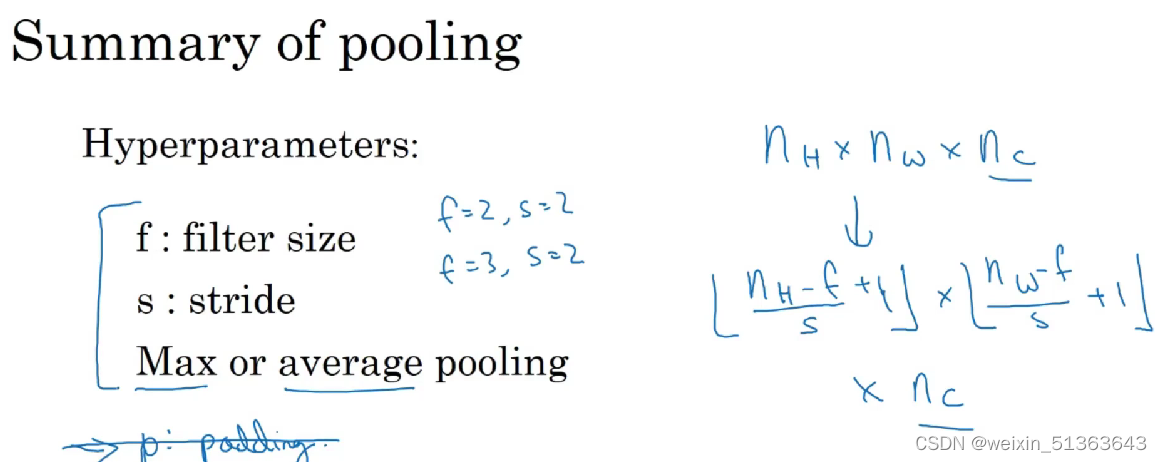
一般没有padding, 池化会减小高和宽(降维),但channel不会改变。
它实际上是一种形式的降采样。有多种不同形式的非线性池化函数,而其中“最大池化(Max pooling)”是最为常见的。它是将输入的图像划分为若干个矩形区域,对每个子区域输出最大值。直觉上,这种机制能够有效地原因在于,在发现一个特征之后,它的精确位置远不及它和其他特征的相对位置的关系重要。池化层会不断地减小数据的空间大小,因此参数的数量和计算量也会下降,这在一定程度上也控制了过拟合。通常来说,CNN的卷积层之间都会周期性地插入池化层。

池化的作用: 池化操作后的结果相比其输入缩小了。池化层的引入是仿照人的视觉系统对视觉输入对象进行降维和抽象。在卷积神经网络过去的工作中,研究者普遍认为池化层有如下三个功效:
1.特征不变性:池化操作是模型更加关注是否存在某些特征而不是特征具体的位置。其中不变形性包括,平移不变性、旋转不变性和尺度不变性。
平移不变性是指输出结果对输入对小量平移基本保持不变,例如,输入为(1, 5, 3), 最大池化将会取5,如果将输入右移一位得到(0, 1, 5),输出的结果仍将为5。对伸缩的不变形,如果原先的神经元在最大池化操作后输出5,那么经过伸缩(尺度变换)后,最大池化操作在该神经元上很大概率的输出仍是5.
2.特征降维(下采样):池化相当于在空间范围内做了维度约减,从而使模型可以抽取更加广范围的特征。同时减小了下一层的输入大小,进而减少计算量和参数个数。
3.在一定程度上防止过拟合,更方便优化。
4.实现非线性(类似relu)。
5.扩大感受野。
代码:
torch.nn.functional.avg_pool2d(input, kernel_size, stride=None,
padding=0, ceil_mode=False, count_include_pad=True)下采样和上采样
缩小图像(或称为下采样(subsampled)或降采样(downsampled))的主要目的有两个:
1、使得图像符合显示区域的大小;
2、生成对应图像的缩略图。
放大图像(或称为上采样(upsampling)或图像插值(interpolating))的主要目的是:放大原图像,从而可以显示在更高分辨率的显示设备上。
上采样和下采样都是一种抽象描述,其具体实现有很多种方式:
下采样:
-
用stride为2的卷积层实现:卷积过程导致的图像变小是为了提取特征。下采样的过程是一个信息损失的过程,而池化层是不可学习的,用stride为2的可学习卷积层来代替pooling可以得到更好的效果,当然同时也增加了一定的计算量。
-
用stride为2的池化层实现:池化下采样是为了降低特征的维度。如Max-pooling和Average-pooling,目前通常使用Max-pooling,因为他计算简单而且能够更好的保留纹理特征。
上采样:
-
插值,一般使用的是双线性插值,因为效果最好,虽然计算上比其他插值方式复杂,但是相对于卷积计算可以说不值一提,其他插值方式还有最近邻插值、三线性插值等;
-
转置卷积又或是说反卷积(Transpose Conv),通过对输入feature map间隔填充0,再进行标准的卷积计算,可以使得输出feature map的尺寸比输入更大;相比上池化,使用反卷积进行图像的“上采样”是可以被学习的(会用到卷积操作,其参数是可学习的)。
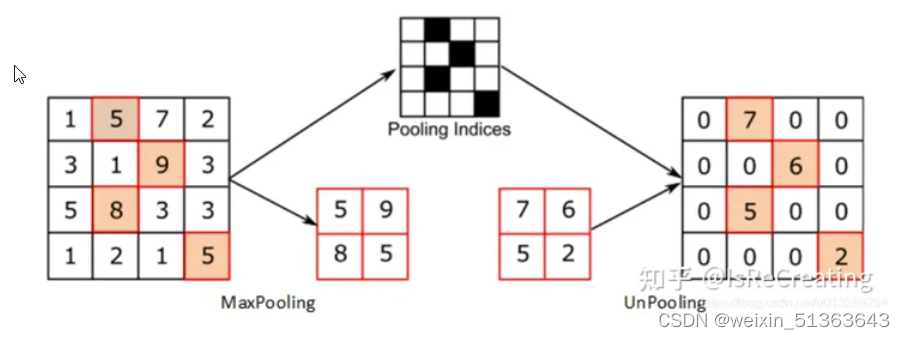
1.Up-Pooling - Max Unpooling && Avg Unpooling --Max Unpooling,在对称的max pooling位置记录最大值的索引位置,然后在unpooling阶段时将对应的值放置到原先最大值位置,其余位置补0;
(相当于是max pooling的反向传播)
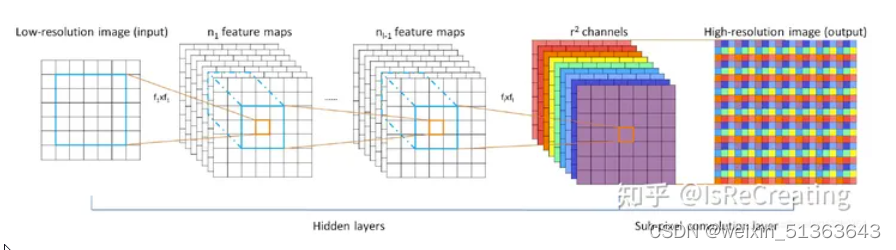
2.PixelShuffle(像素重组)
 下面评论有一个点:
下面评论有一个点:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









