






嵌入式学习-FreeRTOS-Day3
一、思维导图
二、
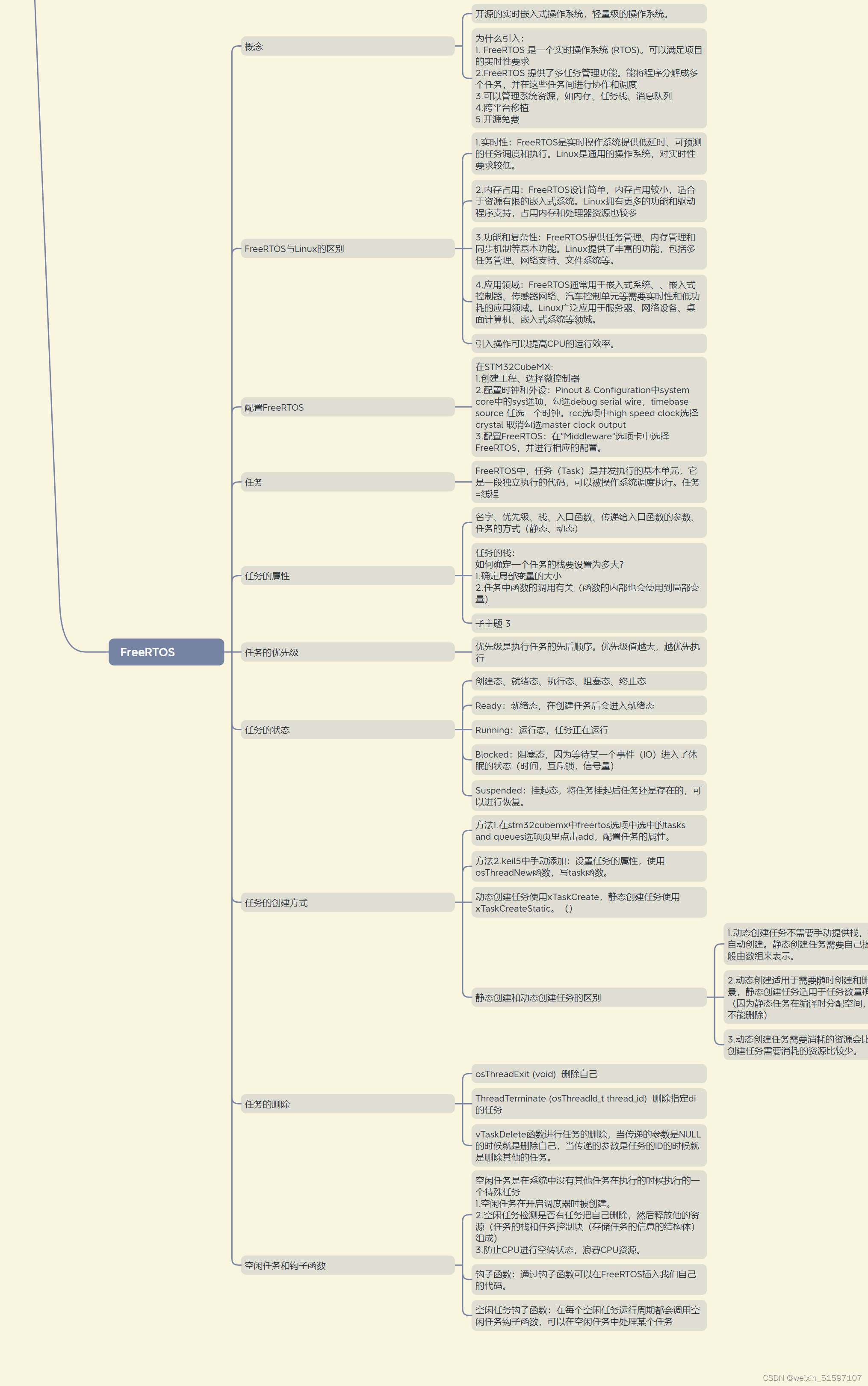
1.FreeRTOS任务的调度算法及实现
默认是抢占式调度+时间片轮询
1.抢占式调度:任务优先级高的可以打断任务优先级低的执行(适用于不同优先级)
2.时间片轮转:每一个任务拥有相同的时间片(1ms),保证任务执行的公平性,当一个任务的时间片耗尽时任务就必须退出(适用于相同优先级)
3.协作式调度:任务自行决定何时释放处理器控制权。通常是通过调用延迟函数或主动让出控制权的函数来实现。协作式调度不会被中断打断,而是等待任务自愿地让出 CPU 控制权。
验证抢占式调度、时间片轮询
/* Definitions for defaultTask */
osThreadId_t defaultTaskHandle;
const osThreadAttr_t defaultTask_attributes = {
.name = "defaultTask",
.stack_size = 128 * 4,
.priority = (osPriority_t) osPriorityNormal,
};
/* Definitions for myTask02 */
osThreadId_t myTask02Handle;
uint32_t myTask02Buffer[ 64 ];
osStaticThreadDef_t myTask02ControlBlock;
const osThreadAttr_t myTask02_attributes = {
.name = "myTask02",
.cb_mem = &myTask02ControlBlock,
.cb_size = sizeof(myTask02ControlBlock),
.stack_mem = &myTask02Buffer[0],
.stack_size = sizeof(myTask02Buffer),
.priority = (osPriority_t) osPriorityNormal1,
};
/* Definitions for myTask03 */
osThreadId_t myTask03ControlBlock;
const osThreadAttr_t myTask03_attributes = {
.name = "myTask03",
.stack_size = 128 * 4,
.priority = (osPriority_t) osPriorityNormal,
};
/* Private function prototypes -----------------------------------------------*/
void StartDefaultTask(void *argument);
void StartTask02(void *argument);
void StartTask03(void *argument);
/* Create the thread(s) */
/* creation of defaultTask */
defaultTaskHandle = osThreadNew(StartDefaultTask, NULL, &defaultTask_attributes);
/* creation of myTask02 */
myTask02Handle = osThreadNew(StartTask02, NULL, &myTask02_attributes);
/* creation of myTask03 */
myTask03Handle = osThreadNew(StartTask03, NULL, &myTask03_attributes);
/* USER CODE BEGIN RTOS_THREADS */
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void *argument)
{
/* USER CODE BEGIN StartDefaultTask */
/* Infinite loop */
//int num = 0;
int i = 0;
for(;;)
{
printf("defaulttask start\r\n");
for (i = 0; i<10000000; i++)
{
;
}
printf("defaulttask end\r\n");
}
/* USER CODE END StartDefaultTask */
}
/* USER CODE END Header_StartTask02 */
void StartTask02(void *argument)
{
/* USER CODE BEGIN StartTask02 */
/* Infinite loop */
//int i=1;
for(;;)
{
printf("task02 running\r\n");
}
/* USER CODE END StartTask02 */
}
/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application */
void StartTask03(void *argument)
{
for(;;)
{
printf("task03 running\r\n");
}
}
/* USER CODE END Application */
运行结果
2.任务的状态以及是怎么样进行转换的
Ready:就绪态,在创建任务后会进入就绪态
Running:运行态,任务正在运行
Blocked:阻塞态,因为等待某一个事件进入了休眠的状态(时间,互斥锁,信号量)
Suspended:挂起态,将任务挂起后任务还是存在的,可以进行恢复。
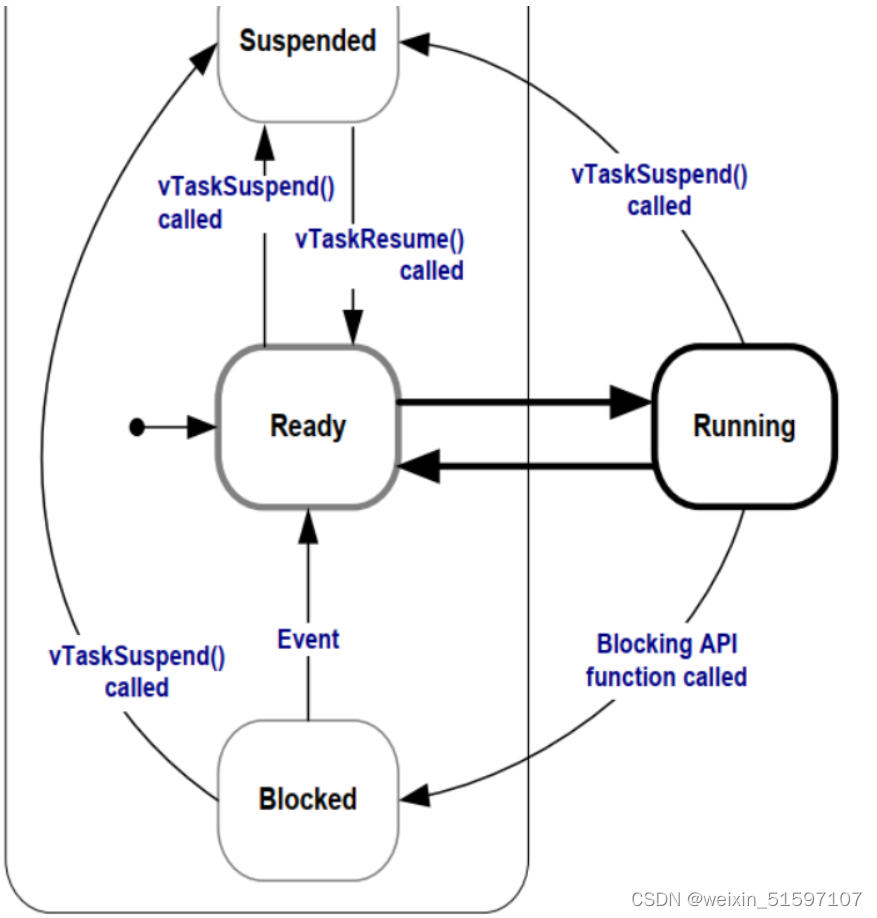
Running->Suspnded:使用vTaskSuspend将任务挂起
Ready->Suspnded:使用vTaskSuspend将任务挂起,使用vTaskResume将任务恢复
Running->Blocked:使用休眠函数或者是被信号量,互斥锁等阻塞
Blocked->Suspnded:使用vTaskSuspend将任务挂起
Blocked->Ready:当休眠完成后或者是当等待到信号量,互斥锁等进行就绪态















 373
373











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









