






最近因为项目推进,需要对一款Depth_Camera ,Intel® RealSense™ 深度摄像头 D455,做一定的研究。
一、硬件介绍
1.1摄像头组成
首先从硬件部分开始梳理,先清楚四个摄像头分别是什么。
 翻阅手册可以看到基本的硬件组成如下:
翻阅手册可以看到基本的硬件组成如下:
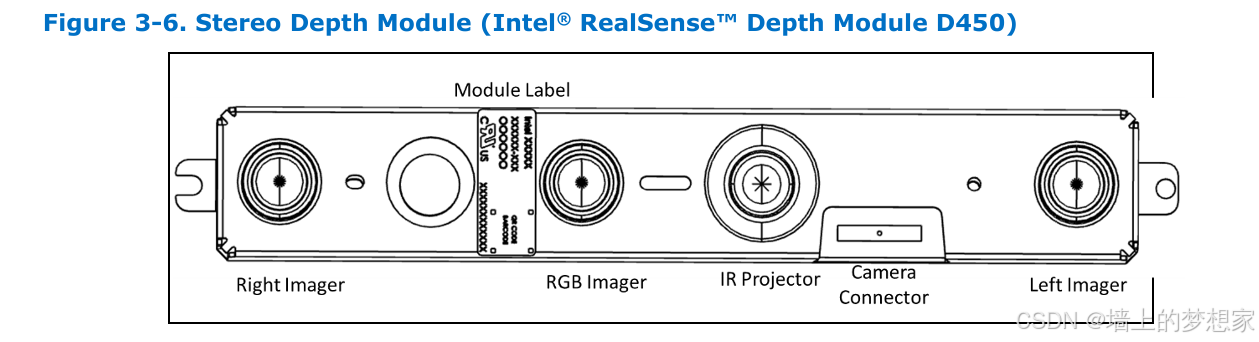
- 红外投影仪(IR Projector): 发射红外光,生成特定的红外光图案,如点阵或条纹,并且可以与红外摄像头配合,通过分析反射光计算物体的深度和形状。
- 左右红外相机(Right/Left Imager):同时捕捉左右视角的图像,通过视差计算深度信息。
- 视觉处理器D4:接收左右红外相机的图像数据,通过计算左右图像之间的视差(即像素点的位移)来推断出每个像素点的深度值。
- RGB相机(RGB Imager):同时捕捉彩色图像,与深度图像进行配准,生成RGBD图像。
- IMU提供设备的姿态信息,辅助进行空间定位和姿态跟踪。
备注:红外投影仪(IR Projector)是一种发射不可见红外光的主动光学设备,主要用于增强视觉系统在低光或无光环境下的感知能力。以下是其核心要点:
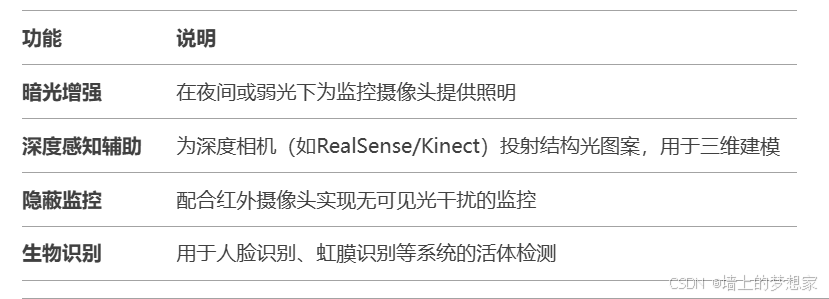
在深度相机中的作用是:
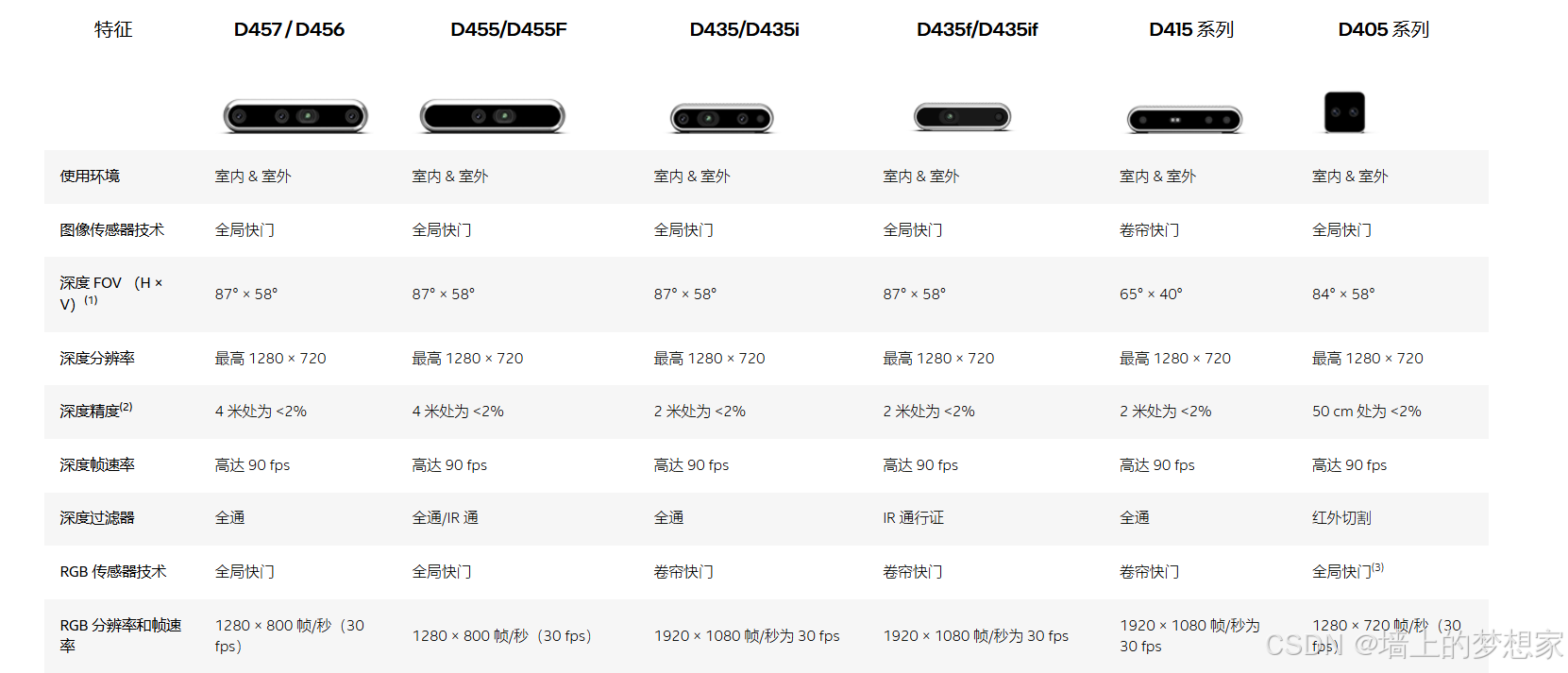
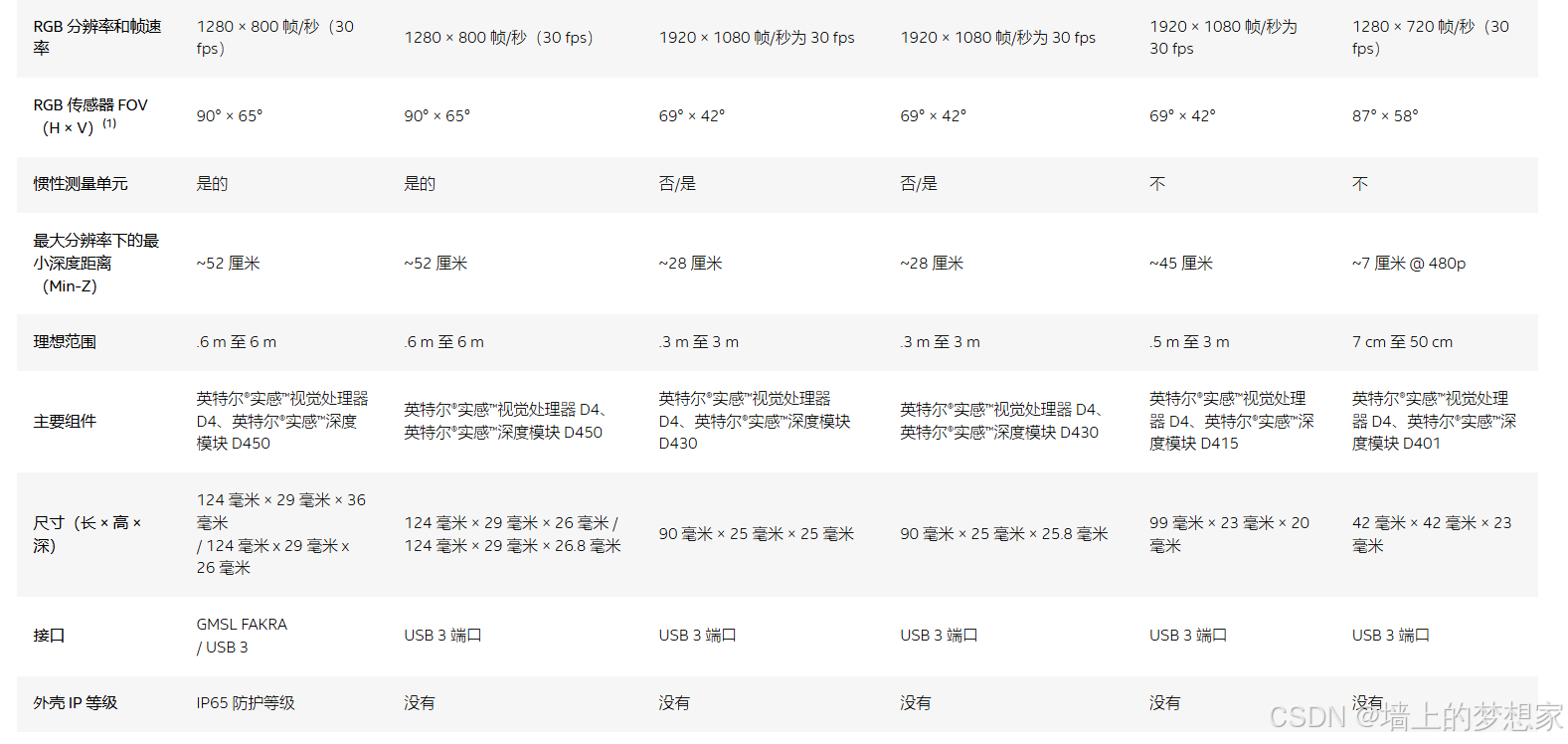
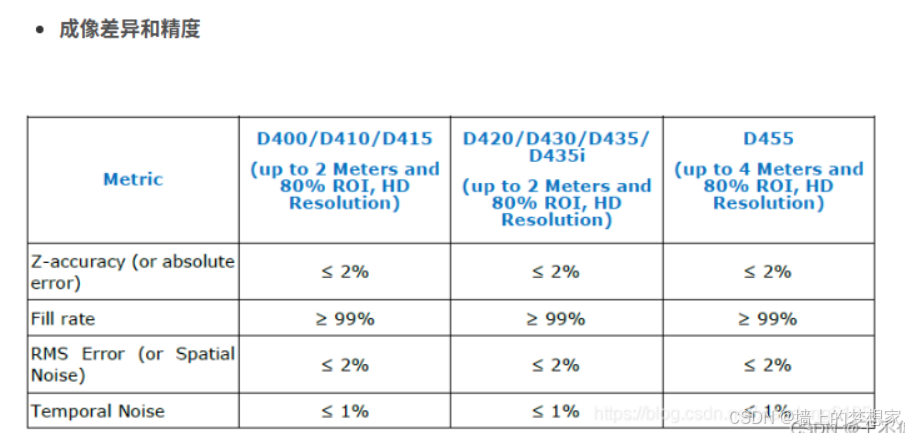
1.2参数介绍
具体参数介绍:
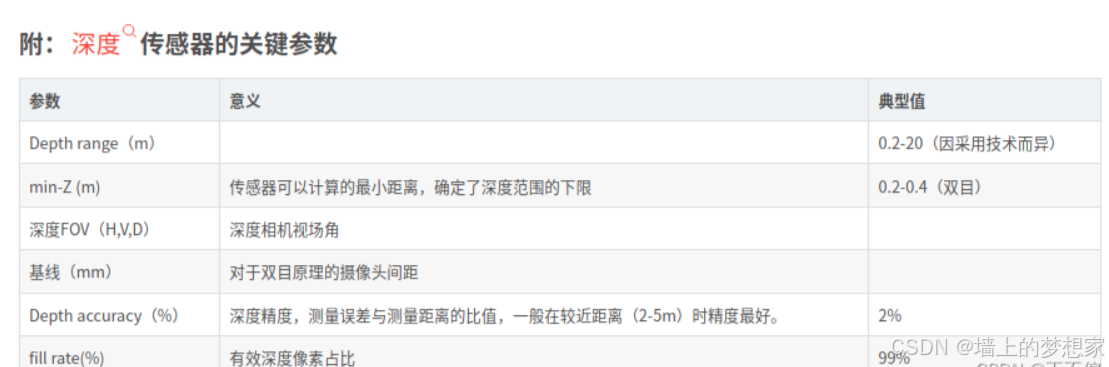
1.3 内容补充: 双目测距的基本原理
https://cloud.tencent.com/developer/article/1666228
双目相机测距原理图和生成深度图_2d相机生成深度图-CSDN博客
通过这部分内容补充,可以对基线深度范围下限等基本参数有很好的理解。
参数补充:
FOV:D455 深度和RGB摄像头的FOV相同,为87°×58°。其中水平方向87°,垂直方向是58°。深度图像与RGB图像的对应上更方便。
二、深度相机的深度测量原理
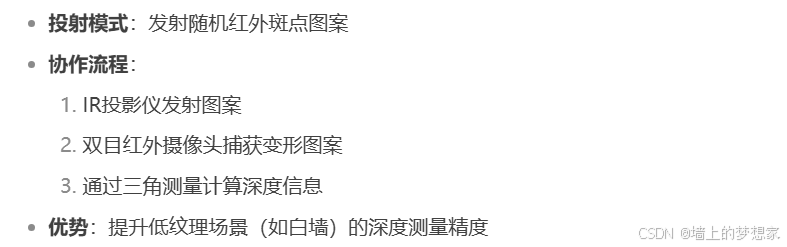
英特尔实感D400系列深度相机使用立体视觉来计算深度。立体视觉实施由左成像仪、右成像仪和可选的红外投影仪组成。红外投影仪投射不可见的静态红外图案,以提高低纹理场景中的深度精度。左和右成像器捕捉场景并将成像器数据发送到深度成像(视觉)处理器,该处理器通过将左图像上的点与右图像相关联以及通过左图像上的点和右图像之间的移动来计算图像中每个像素的深度值。深度像素值被处理以生成深度帧。后续深度帧创建深度视频流。
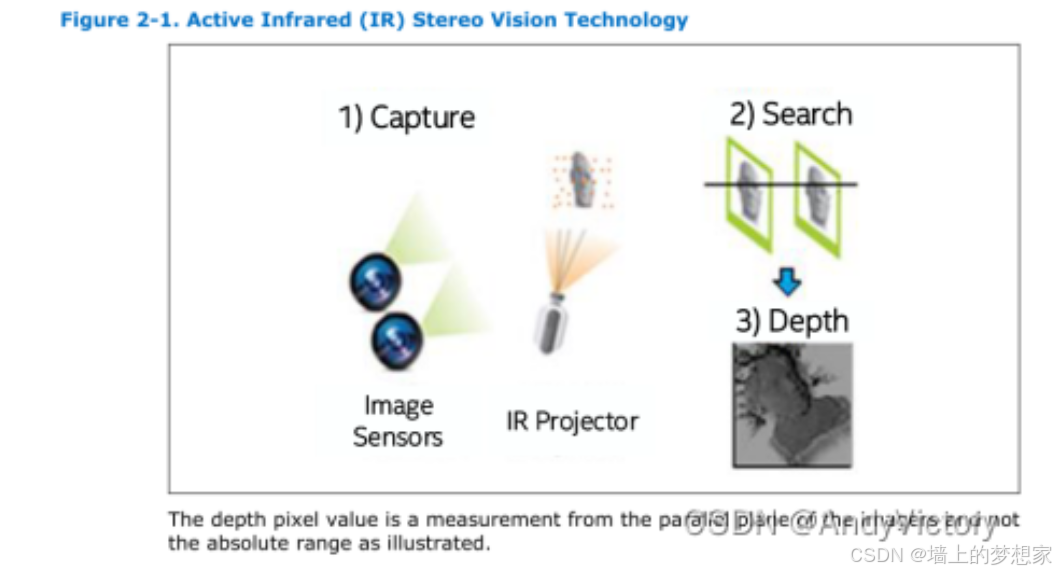
Intel Realsence D400系列,采用经典的双目视觉原理来测量深度。左右两个相机将图像数据送入内置的深度处理器,再基于双目测距的原理计算每个像素的深度值。尽管有红外投射器,但并非采用红外反射器测距。红外投射器的作用仅仅是投射不可见的固定的红外纹理样式(如散斑),提高在纹理不明显的环境中的深度计算精度。
三、深度相机入门
3.1 Intel® RealSense™ Viewer
在清楚相机的基本原理和硬件信息后,需要了解如何使用Intel® RealSense™ Viewer,安装 Intel RealSense SDK 2.0。所谓的 Intel RealSense SDK 2.0是面向英特尔®实感™深度摄像头的跨平台库。
首先需要知道 Intel® RealSense™ Viewer 是什么东西,可以用来提供对深度摄像头数据流的即时访问。
SDK 支持深度和颜色流,并提供内部和外部校准信息。 该库还提供合成流(点云、深度与颜色对齐,反之亦然),以及对流会话录制和播放的内置支持。
3.2 Intel® RealSense™ Viewer 的安装
安装链接:GitHub - IntelRealSense/librealsense at v2.56.3
安装指引:librealsense/doc/distribution_windows.md at v2.56.3 · IntelRealSense/librealsense · GitHub
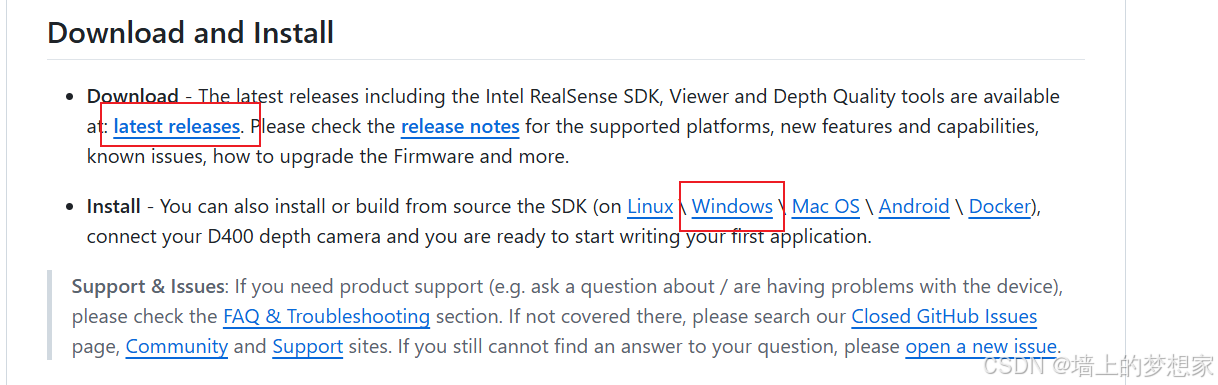
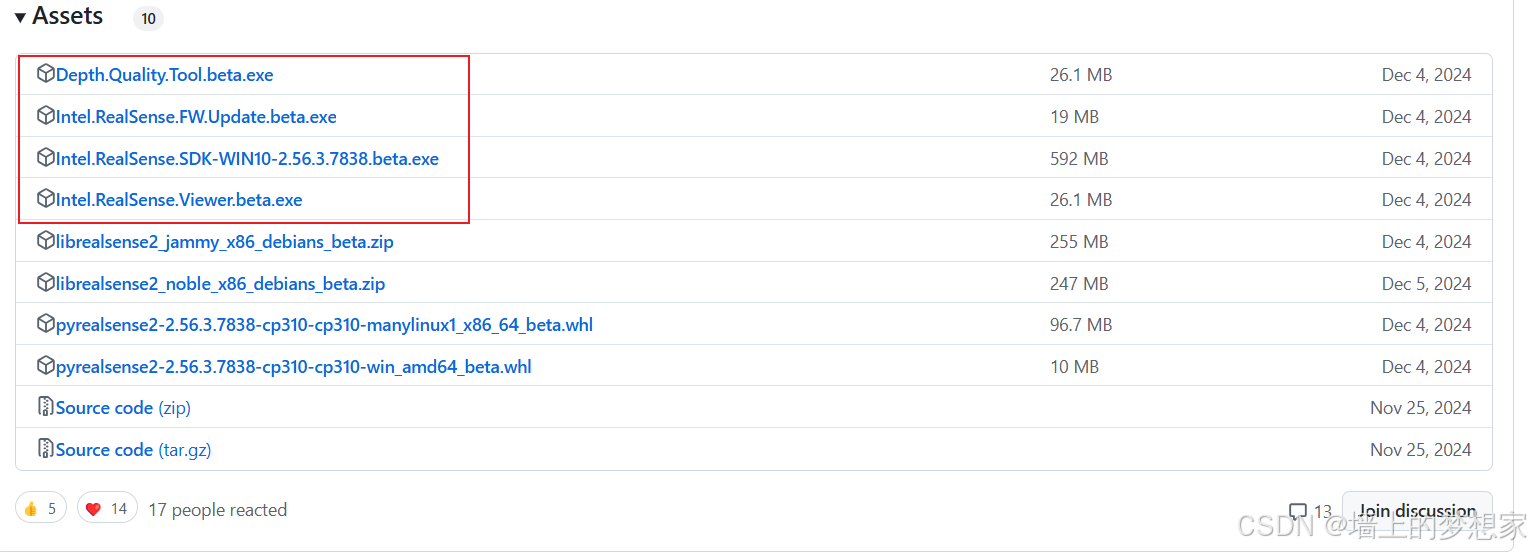
其中的 latest_releases 中包含了Intel® RealSense™ SDK 2.0 beta (v2.56.3),其中包含了详细的工具。
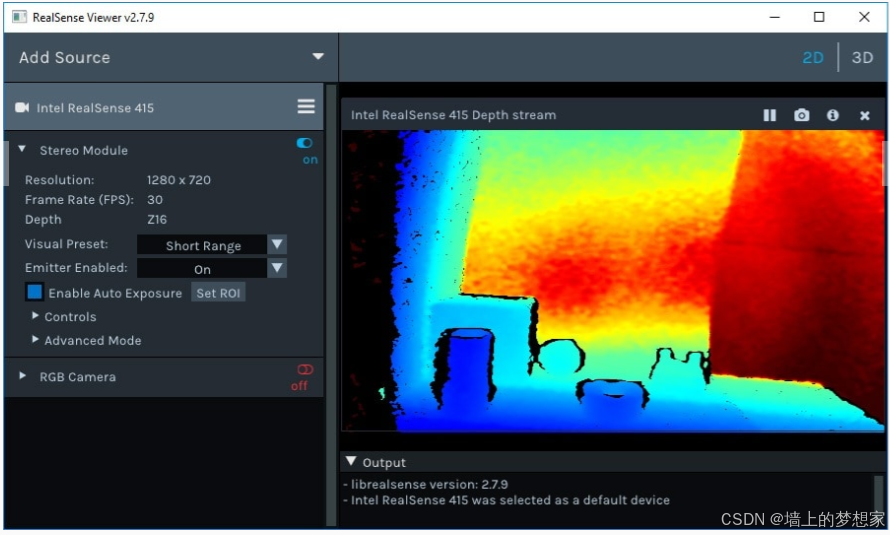
打开检视器后可以发现有深度流和视频流。
3.3 Intel® RealSense™ Viewer 的使用
打开 Stereo Module (立体声模块) 以查看深度流,如下:
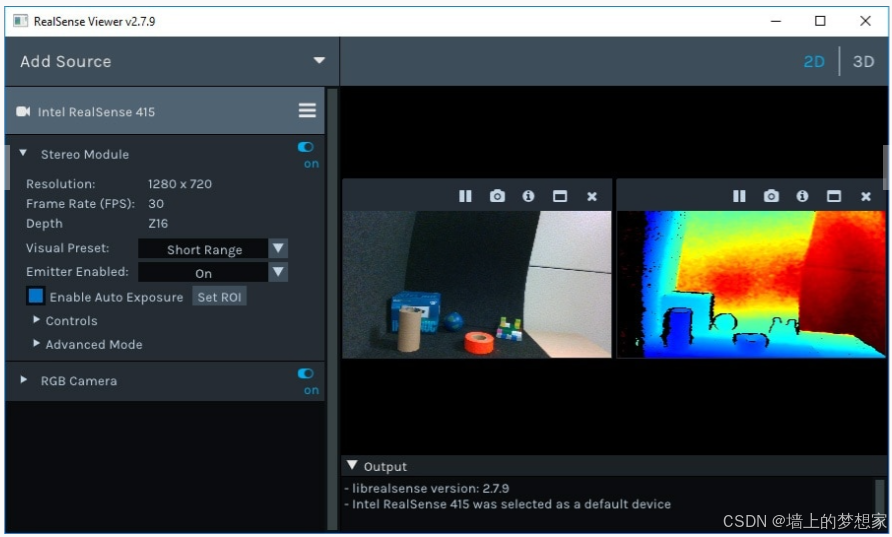
打开 RGB 相机以并排查看 RGB 流和深度流。
综上所述是对于深度相机D455的基本内容探索,主要包括对硬件、参数、和相关入门软件的介绍。
内容仅为个人学习整理思路所用。

















 396
396

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









