







0 前言
这篇笔记的初衷是让大家避免在复习时被老师糟糕的PPT影响,但没有完全做完。有些地方超出能力范围,我也无法全部讲清楚,而且已经时隔两年,我也没有时间再去深究,因此仅供大家参考。另外,编程作业的资源里有个人信息,所以还是隐藏了(主要是看了一下以前的实验报告有点莫名羞耻)。
关于哪些内容是需要掌握的,可以这么理解:1.课本上或者笔记里分点列出的,基本上是需要理解的;2.形式简单或有规律的公式,推导过程需要掌握。这里面不涉及很难的推导,只要记住思路即可。太复杂的推导不会考,但需要知道它的目的、结果之类。咱们测绘从来不为难学生(笑),主要还是知识点之间的逻辑和重要的公式。祝大家学习快乐。
1 引力和引力位
1.1 引力
为便于计算,物理大地测量学中所讨论的引力,被吸引质体始终是单位质量。
根据牛顿万有引力定律:
F
=
G
m
1
m
2
l
2
\large F=G\frac{m_1m_2}{l^2}
F=Gl2m1m2
令
m
1
=
m
,
m
2
=
1
m_1=m, m_2=1
m1=m,m2=1 ,得到引力表达式:
F
=
G
m
l
2
\large F=G\frac{m}{l^2}
F=Gl2m
在直角坐标系下,假设质点m坐标为 ,被吸引点P坐标为 ,容易得到引力在XYZ三个坐标轴上的分量大小:
{
X
=
−
F
cos
α
=
−
G
m
l
2
x
−
ξ
l
=
−
G
m
(
x
−
ξ
)
l
3
Y
=
−
F
cos
β
=
−
G
m
l
2
y
−
η
l
=
−
G
m
(
y
−
η
)
l
3
Z
=
−
F
cos
γ
=
−
G
m
l
2
z
−
ζ
l
=
−
G
m
(
z
−
ζ
)
l
3
\large \left\{ \begin{array}{c}X=-F\cos \alpha =-\frac{Gm}{l^2}\frac{x-\xi}{l}=-\frac{Gm\left( x-\xi \right)}{l^3}\\Y=-F\cos \beta =-\frac{Gm}{l^2}\frac{y-\eta}{l}=-\frac{Gm\left( y-\eta \right)}{l^3}\\Z=-F\cos \gamma =-\frac{Gm}{l^2}\frac{z-\zeta}{l}=-\frac{Gm\left( z-\zeta \right)}{l^3}\\ \end{array} \right.
⎩
⎨
⎧X=−Fcosα=−l2Gmlx−ξ=−l3Gm(x−ξ)Y=−Fcosβ=−l2Gmly−η=−l3Gm(y−η)Z=−Fcosγ=−l2Gmlz−ζ=−l3Gm(z−ζ)
其中:
l
=
(
x
−
ξ
)
2
+
(
y
−
η
)
2
+
(
z
−
ζ
)
2
\large l=\sqrt{\left( x-\xi \right) ^2+\left( y-\eta \right) ^2+\left( z-\zeta \right) ^2}
l=(x−ξ)2+(y−η)2+(z−ζ)2
余弦值的计算,可以放到长方体中去看,比较清楚明了:

分量的计算,是为了导出引力位做准备。
1.2 引力位
1.2.1 引力位定义
对于任何的力场都有对应的位场。给出位函数的定义:
设有一个标量函数,它对被吸引点各坐标轴的偏导数等于力在相应坐标轴上的分量。
对于引力,则有引力位:
V
=
G
m
l
\large V=\frac{Gm}{l}
V=lGm
证明该公式,只需要求V在三个方向上的偏导,和上面求得.的分量对比即可,这里省略。
事实上,力位在任意方向上的方向导数都等于力在该方向的投影。
1.2.2 利用引力位计算做功
引力场是保守力场,做功和路径无关,有起始点的位置决定。易得:
A
=
−
∫
l
1
l
2
G
m
l
2
d
l
=
G
m
l
2
−
G
m
l
1
=
V
2
−
V
1
\large A=-\int_{l_1}^{l_2}{\frac{Gm}{l^2}}dl=\frac{Gm}{l_2}-\frac{Gm}{l_1}=V_2-V_1
A=−∫l1l2l2Gmdl=l2Gm−l1Gm=V2−V1
因此从引力所做的功等于终点引力位减去起点引力位。
1.2.3 利用引力位计算位能
位能是将质点移动到选定的零位置时保守力所做的功。由做功计算可得
E
=
V
∞
−
V
=
0
−
V
=
−
V
\large E=V_{\infty}-V=0-V=-V
E=V∞−V=0−V=−V
因此位能和引力位互为相反数。
1.3 层、面、质体的引力及其位
考虑到引力位的表达形式最简单,并且引力可以通过对引力位梯度运算求得,因此这里所有的过程都是微元→积分→得到引力位→得到引力。历年卷中会考察密度不均匀质体的引力位计算,基本都是大物的基础,知道基本的思路即可。
1.3.2 质面和质体
闭合表面质量为
m
m
m,密度为
κ
κ
κ,面积单元为
d
σ
dσ
dσ,则有
κ
=
d
m
d
σ
\large \kappa =\frac{dm}{d\sigma}
κ=dσdm
积分得
V
=
G
∬
σ
d
m
l
=
G
∬
σ
κ
l
d
σ
\large V=G\iint\limits_{\sigma}{\frac{dm}{l}}=G\iint\limits_{\sigma}{\frac{\kappa}{l}}d\sigma
V=Gσ∬ldm=Gσ∬lκdσ
同样地,对于质体,只需要把密度符号换一下:
V
=
G
∬
v
d
m
l
=
G
∬
σ
ρ
l
d
v
\large V=G\iint\limits_v{\frac{dm}{l}}=G\iint\limits_{\sigma}{\frac{\rho}{l}}dv
V=Gv∬ldm=Gσ∬lρdv
接下来讨论一些典型质体:
1.3.3 均质球面

外部
取球面上一个微小的近似矩形,写出其两个边长,得到微分面积dσ
d
σ
=
R
d
ψ
⋅
R
sin
ψ
d
λ
\large d\sigma =Rd\psi \cdot R\sin \psi d\lambda
dσ=Rdψ⋅Rsinψdλ
则球面形成的引力位为
V
e
=
G
∬
σ
κ
l
d
σ
=
G
κ
∫
0
2
π
∫
0
π
R
2
sin
ψ
l
d
ψ
d
λ
\large V_e=G\iint\limits_{\sigma}{\frac{\kappa}{l}d\sigma}=G\kappa \int_0^{2\pi}{\int_0^{\pi}{\frac{R^2\sin \psi}{l}d\psi d\lambda}}
Ve=Gσ∬lκdσ=Gκ∫02π∫0πlR2sinψdψdλ
由余弦定理,构建
ψ
ψ
ψ 和
l
l
l 的函数关系,从而将
d
ψ
dψ
dψ 转换为
d
l
dl
dl ,便于积分运算:
l
2
=
R
2
+
r
2
−
2
R
r
cos
ψ
\large l^2=R^2+r^2-2Rr\cos \psi
l2=R2+r2−2Rrcosψ
两边同时微分:
2
l
d
l
=
2
R
r
sin
ψ
d
ψ
\large 2ldl=2Rr\sin \psi d\psi
2ldl=2Rrsinψdψ
代入得:
V
e
=
G
κ
∫
0
2
π
∫
r
−
R
r
+
R
R
l
r
d
l
d
λ
=
G
κ
R
r
∫
0
2
π
∫
r
−
R
r
+
R
d
l
d
λ
=
G
κ
R
r
2
π
⋅
2
R
=
G
r
⋅
4
π
R
2
κ
=
G
M
r
\large V_e=G\kappa \int_0^{2\pi}{\int_{r-R}^{r+R}{\frac{R}{lr}dld\lambda}}=G\kappa \frac{R}{r}\int_0^{2\pi}{\int_{r-R}^{r+R}{dld\lambda}} \\ \\ \\ =G\kappa \frac{R}{r}2\pi \cdot 2R=\frac{G}{r}\cdot 4\pi R^2\kappa =G\frac{M}{r}
Ve=Gκ∫02π∫r−Rr+RlrRdldλ=GκrR∫02π∫r−Rr+Rdldλ=GκrR2π⋅2R=rG⋅4πR2κ=GrM
则引力大小为:
F
e
=
∂
V
e
∂
r
=
−
G
M
r
2
\large F_e=\frac{\partial V_e}{\partial r}=-G\frac{M}{r^2}
Fe=∂r∂Ve=−Gr2M
内部
几何关系和外部一样,因此只需要改变
d
l
dl
dl 的积分上下限:
V
i
=
G
κ
R
r
∫
0
2
π
∫
R
−
r
R
+
r
d
l
d
λ
=
4
π
G
κ
R
=
G
M
R
\large V_i=G\kappa \frac{R}{r}\int_0^{2\pi}{\int_{R-r}^{R+r}{dld\lambda}}=4\pi G\kappa R=G\frac{M}{R}
Vi=GκrR∫02π∫R−rR+rdldλ=4πGκR=GRM
F
i
=
∂
V
i
∂
r
=
0
\large F_i=\frac{\partial V_i}{\partial r}=0
Fi=∂r∂Vi=0
结论
球面对外部点的引力,等同于将球面质量完全集中在球心的质点;
球面对内部点的引力位为常数,因此引力为0。
1.3.3 均质球壳(有厚度)
将球壳看作无数个球面(面密度σ改为体密度ρ),也就是以球面为单元进行积分,此时变量为R。PPT中将内径设为R1,外径设为R,积分时则用R’,个人觉得看起来十分紊乱,因此改为了R1和R2,对R积分。
分为两种情况:
外部( r > R r>R r>R)
和球面面类似,由体积公式,外部引力位同样等同于质量集中在圆心。
内部( R 1 < r < R 2 R_1<r<R_2 R1<r<R2 )
考虑两部分,一部分为R1和r之间的球壳,一部分为r到R2之间的球壳。对于靠外的部分,应用球面内部的引力位公式对R积分;对于靠外的部分,应用上面所求的公式即可。具体过程省略。
1.3.4 平面层
平面层积分较为简单,当然最关键的依然是将当前坐标变量转换dl,会使计算简单很多。
下面直接给出计算过程:
首先依然是考虑微元关系:
d
m
=
κ
⋅
r
d
α
⋅
d
r
\large dm=\kappa \cdot rd\alpha \cdot dr \\
dm=κ⋅rdα⋅dr
其次建立起dl和坐标变量的关系:
l
2
=
r
2
+
z
2
⟺
2
l
d
l
=
2
r
d
r
⟺
l
d
l
=
r
d
r
\large l^2=r^2+z^2\Longleftrightarrow 2ldl=2rdr\Longleftrightarrow ldl=rdr
l2=r2+z2⟺2ldl=2rdr⟺ldl=rdr
最后积分求解:
V
P
=
G
∬
σ
d
m
l
=
G
∫
0
2
π
∫
0
R
κ
r
r
2
+
z
2
d
r
d
α
=
G
∫
0
2
π
∫
z
R
2
+
z
2
κ
l
l
d
l
d
α
=
2
π
G
κ
(
R
2
+
z
2
−
z
)
\large V_P=G\iint\limits_{\sigma}{\frac{dm}{l}}=G\int_0^{2\pi}{\int_0^R{\frac{\kappa r}{\sqrt{r^2+z^2}}}}drd\alpha \\ =G\int_0^{2\pi}{\int_z^{\sqrt{R^2+z^2}}{\frac{\kappa l}{l}}}dld\alpha =2\pi G\kappa \left( \sqrt{R^2+z^2}-z \right)
VP=Gσ∬ldm=G∫02π∫0Rr2+z2κrdrdα=G∫02π∫zR2+z2lκldldα=2πGκ(R2+z2−z)
这里比较典型的一点是,尽管位函数显然是处处连续的,但在平面层的上下交界处,其导数不连续(力的方向大小相等,方向相反),因此引力场可能不连续。严格证明则可以通过求极限,这里不再展开。
2 引力位的性质
这部分内容比较重要,因此单独拎出来。
1 引力位对任意方向h的导数等于引力在该方向上的分量
2 引力位与位能的数值相同,符号相反
前面已经证明过,掌握定义即可直接推导
3 引力的方向与引力位水准面(等位面)的法向重合。同一簇等位面之间既不平行又不相交和相切
可通过性质1简单证明,即夹角为0°和90°两种情况,得到一个为0,一个为最大值(也就是引力)。
4 引力位是一个在无穷远处的正则函数,满足下列等式:

证明的方法如出一辙,将引力位基本公式:
V
=
∭
v
G
d
m
l
V=\iiint\limits_v{G\frac{dm}{l}}
V=v∭Gldm
代入每个式子,简单求极限即可。
5 质体引力为在吸引质量外部满足Laplace方程:
证明也很容易,首先对 求三次二阶导,证明其调和性:
∂
2
∂
x
2
(
1
l
)
=
−
1
l
3
+
3
(
x
−
ξ
)
2
l
5
⟹
Δ
(
1
l
)
=
−
3
l
3
+
3
l
2
l
5
=
0
\frac{\partial ^2}{\partial x^2}\left( \frac{1}{l} \right) =-\frac{1}{l^3}+\frac{3\left( x-\xi \right) ^2}{l^5}\Longrightarrow \varDelta \left( \frac{1}{l} \right) =-\frac{3}{l^3}+\frac{3l^2}{l^5}=0
∂x2∂2(l1)=−l31+l53(x−ξ)2⟹Δ(l1)=−l33+l53l2=0
应用引力位基本公式,由于其它量和xyz都无关,因此Laplace算子可以直接放入积分内部:
Δ
V
=
Δ
(
G
∭
v
d
m
l
)
=
G
∭
v
Δ
(
1
l
)
d
m
=
0
\varDelta V=\varDelta \left( G\iiint\limits_v{\frac{dm}{l}} \right) =G\iiint\limits_v{\varDelta \left( \frac{1}{l} \right) dm}=0
ΔV=Δ
Gv∭ldm
=Gv∭Δ(l1)dm=0
6 质体引力位在质体内部满足Poisson方程
证明思路:
在质体内任取一点,并以该点为圆心取任意半径的球体(球体完全在该质体内部),此时有两部分引力位。对于球体以外的部分,其
Δ
V
\Delta V
ΔV沿用性质5,显然等于0;对于球体部分产生的引力位,套用之前球层的引力位公式:
V
1
=
2
3
π
G
ρ
(
3
R
2
−
r
2
)
V_1=\frac{2}{3}\pi G\rho \left( 3R^2-r^2 \right)
V1=32πGρ(3R2−r2)
容易得到:
Δ
V
1
=
−
4
π
G
ρ
\varDelta V_1=-4\pi G\rho
ΔV1=−4πGρ
2.7 质体引力位的二阶导数在密度发生突变时是不连续的
这一点可以直接参照Poisson方程,其二阶导和密度ρ线性相关,因此密度不连续时,二阶导也不连续。任意举一个例子都能得出这个结论。
3 球谐函数
球谐函数是最重要的谐函数。在书上并没有对其概念和用处做详细的介绍,导致很长一段时间都非常困惑于此。
这里可以简单将球谐函数理解为类似于傅里叶变换的展开式,同样它所使用的也是一组正交基底。球谐函数是在球面坐标系中进行的,相对应的,如果去掉半径量,就得到面谐函数。
在物理大地测量学中,球谐函数的主要作用就是将谐函数展开成级数形式,便于编程计算。什么是谐函数?满足Laplace方程的就是谐函数——因此球谐函数可以用来表达地球引力位。有了引力位,其它重力场参数如大地水准面高、重力扰动、重力异常也就水到渠成。
3.1 Laplace方程的球坐标形式
通过球坐标和直角坐标的关系,求二阶导数,当然可以将Laplace方程的直角形式转换为球坐标形式。但实际上任何正交坐标都有通用的转换方式,只需要建立两坐标系的数学关系,求得新坐标系的拉梅系数hi,即可得到其Laplace方程表达式。
3.1.1 正交坐标系
怎样确定一个坐标系是否正交?书上给出的方法是计算ds,也就是微分弧段的长度。
在直角坐标系中:
d
s
2
=
d
x
2
+
d
y
2
+
d
z
2
ds^2=dx^2+dy^2+dz^2
ds2=dx2+dy2+dz2
根据球坐标和直角坐标转换关系:
{
x
=
r
sin
θ
cos
λ
y
=
r
sin
θ
sin
λ
z
=
r
cos
θ
\left\{ \begin{array}{c} x=r\sin \theta \cos \lambda\\ y=r\sin \theta \sin \lambda\\ z=r\cos \theta\\ \end{array} \right.
⎩
⎨
⎧x=rsinθcosλy=rsinθsinλz=rcosθ
得到在球坐标系下ds的表达式:
d
s
2
=
d
r
2
+
r
2
d
θ
2
+
r
2
sin
2
θ
d
λ
2
ds^2=dr^2+r^2d\theta ^2+r^2\sin ^2\theta d\lambda ^2
ds2=dr2+r2dθ2+r2sin2θdλ2
其中不包含drdθ等交叉项,说明了求坐标的正交性。
实际上,在正交坐标系 中,如果将单元弧段的形式表示为:
d
s
2
=
h
1
2
d
q
1
2
+
h
2
2
d
q
2
2
+
h
3
2
d
q
3
2
ds^2=h_{1}^{2}dq_{1}^{2}+h_{2}^{2}dq_{2}^{2}+h_{3}^{2}dq_{3}^{2}
ds2=h12dq12+h22dq22+h32dq32
其中hi称为拉梅系数。
则可以证明得到其Laplace方程表达形式为:
Δ
V
=
1
h
1
h
2
h
3
[
∂
∂
q
1
(
h
2
h
3
h
1
∂
V
∂
q
1
)
+
∂
∂
q
2
(
h
1
h
3
h
2
∂
V
∂
q
2
)
+
∂
∂
q
3
(
h
1
h
2
h
3
∂
V
∂
q
3
)
]
\varDelta V=\frac{1}{h_1h_2h_3}\left[ \frac{\partial}{\partial q_1}\left( \frac{h_2h_3}{h_1}\frac{\partial V}{\partial q_1} \right) +\frac{\partial}{\partial q_2}\left( \frac{h_1h_3}{h_2}\frac{\partial V}{\partial q_2} \right) +\frac{\partial}{\partial q_3}\left( \frac{h_1h_2}{h_3}\frac{\partial V}{\partial q_3} \right) \right]
ΔV=h1h2h31[∂q1∂(h1h2h3∂q1∂V)+∂q2∂(h2h1h3∂q2∂V)+∂q3∂(h3h1h2∂q3∂V)]
3.1.2 球坐标系下的Laplace方程
对于一切的正交坐标系,只需要分别求出
h
1
,
h
2
,
h
3
h_1, h_2, h_3
h1,h2,h3,代入上式即可得到该坐标系下的Laplace方程式。下面省略推导过程,给出球坐标系下的方程形式:
Δ
V
≡
∂
2
V
∂
r
2
+
2
r
∂
V
∂
r
+
1
r
2
∂
2
V
∂
ϑ
2
+
cot
ϑ
r
2
∂
V
∂
ϑ
+
1
r
2
sin
2
ϑ
∂
2
V
∂
λ
2
=
0
\Delta V \equiv \frac{\partial^{2} V}{\partial r^{2}}+\frac{2}{r} \frac{\partial V}{\partial r}+\frac{1}{r^{2}} \frac{\partial^{2} V}{\partial \vartheta^{2}}+\frac{\cot \vartheta}{r^{2}} \frac{\partial V}{\partial \vartheta}+\frac{1}{r^{2} \sin ^{2} \vartheta} \frac{\partial^{2} V}{\partial \lambda^{2}}=0
ΔV≡∂r2∂2V+r2∂r∂V+r21∂ϑ2∂2V+r2cotϑ∂ϑ∂V+r2sin2ϑ1∂λ2∂2V=0
或两边同乘r的平方:
r
2
∂
2
V
∂
r
2
+
2
r
∂
V
∂
r
+
∂
2
V
∂
θ
2
+
cot
θ
∂
V
∂
θ
+
1
sin
2
θ
∂
2
V
∂
λ
2
=
0
r^2\frac{\partial ^2V}{\partial r^2}+2r\frac{\partial V}{\partial r}+\frac{\partial ^2V}{\partial \theta ^2}+\cot \theta \frac{\partial V}{\partial \theta}+\frac{1}{\sin ^2\theta}\frac{\partial ^2V}{\partial \lambda ^2}=0
r2∂r2∂2V+2r∂r∂V+∂θ2∂2V+cotθ∂θ∂V+sin2θ1∂λ2∂2V=0
3.2 球谐函数的导出
在导出球谐函数的过程中,最核心的方法是分离变量法。将V(r,θ,λ) 转换为三个特征函数相乘的形式,分别对应三个变量。即V(r,θ,λ) =f®×g(θ)×h(λ)。 需要掌握三种特征函数的形式,以及球谐函数的形式,球面内外的区别(根据其收敛性)。
3.2.1 第一次分离变量( f ( r ) f(r) f(r))
分离变量:
V
(
r
,
θ
,
λ
)
=
f
(
r
)
Y
(
θ
,
λ
)
V\left( r,\theta ,\lambda \right) =f\left( r \right) Y\left( \theta ,\lambda \right)
V(r,θ,λ)=f(r)Y(θ,λ)
代入Laplace方程得:
1
f
(
r
2
f
′
′
+
2
r
f
′
)
=
−
1
Y
(
∂
2
Y
∂
θ
2
+
cot
θ
∂
Y
∂
θ
+
1
sin
2
θ
∂
2
Y
∂
2
λ
)
\frac{1}{f}\left( r^2f''+2rf' \right) =-\frac{1}{Y}\left( \frac{\partial ^2Y}{\partial \theta ^2}+\cot \theta \frac{\partial Y}{\partial \theta}+\frac{1}{\sin ^2\theta}\frac{\partial ^2Y}{\partial ^2\lambda} \right)
f1(r2f′′+2rf′)=−Y1(∂θ2∂2Y+cotθ∂θ∂Y+sin2θ1∂2λ∂2Y)
由于左右两边变量互不相关,但又要保持等式成立,因此两边都是常数。该常数也叫做本征值。将其表示为 n(n+1) ,则有:
(
r
2
f
′
′
+
2
r
f
′
)
−
n
(
n
+
1
)
f
=
0
\left( r^2f''+2rf' \right) -n\left( n+1 \right) f=0
(r2f′′+2rf′)−n(n+1)f=0
解得关于r的特征函数(两个解):
{
f
(
r
)
=
r
n
f
(
r
)
=
1
r
n
+
1
\left\{ \begin{array}{c} f\left( r \right) =r^n\\ f\left( r \right) =\frac{1}{r^{n+1}}\\ \end{array} \right.
{f(r)=rnf(r)=rn+11
在这里当n为一个常数时,其实对应了微分方程的一个特解。而取n=0,1,2一直到正无穷,乘以一个系数并求和,才能得到通解:
{
f
(
r
)
=
∑
n
=
0
∞
c
n
r
n
f
(
r
)
=
∑
n
=
0
∞
d
n
r
−
(
n
+
1
)
\left\{ \begin{array}{c} f\left( r \right) =\sum_{n=0}^{\infty}{c_nr^n}\\ \\f\left( r \right) =\sum_{n=0}^{\infty}{d_nr^{-\left( n+1 \right)}}\\ \end{array} \right.
⎩
⎨
⎧f(r)=∑n=0∞cnrnf(r)=∑n=0∞dnr−(n+1)
3.2.2 第二次分离变量(面谐函数)
将面谐函数继续分离变量:
Y
(
θ
,
λ
)
=
g
(
θ
)
h
(
λ
)
Y\left( \theta ,\lambda \right) =g\left( \theta \right) h\left( \lambda \right)
Y(θ,λ)=g(θ)h(λ)代入之前的式子得:
sin
θ
g
(
sin
θ
g
′
′
+
cos
θ
g
′
+
n
(
n
+
1
)
sin
θ
g
)
=
−
h
′
′
h
\frac{\sin \theta}{g}\left( \sin \theta g''+\cos \theta g'+n\left( n+1 \right) \sin \theta g \right) =-\frac{h''}{h}
gsinθ(sinθg′′+cosθg′+n(n+1)sinθg)=−hh′′
与之前同理,两边都为常数,将此常数设为m的平方,则有微分方程组:
{
h
′
′
+
m
2
h
=
0
sin
θ
(
sin
θ
g
′
′
+
cos
θ
g
′
+
n
(
n
+
1
)
sin
θ
g
)
−
m
2
g
=
0
\left\{ \begin{array}{c} h''+m^2h=0\\ \sin \theta \left( \sin \theta g''+\cos \theta g'+n\left( n+1 \right) \sin \theta g \right) -m^2g=0\\ \end{array} \right.
{h′′+m2h=0sinθ(sinθg′′+cosθg′+n(n+1)sinθg)−m2g=0
解得h(这个我会! ):
{
h
(
λ
)
=
cos
m
λ
h
(
λ
)
=
sin
m
λ
\left\{ \begin{array}{c} h\left( \lambda \right) =\cos m\lambda\\ h\left( \lambda \right) =\sin m\lambda\\ \end{array} \right.
{h(λ)=cosmλh(λ)=sinmλ
至于g,它的解也就是勒让德级数,该方程称为勒让德微分方程。表示为:
g
(
θ
)
=
P
n
m
(
cos
θ
)
g\left( \theta \right) =P_{nm}\left( \cos \theta \right)
g(θ)=Pnm(cosθ)
书上还有有这么一句话:
可以证明,只有当n和m为整数0,1,2…且m≤n时,才有物理意义上的解
先不管它怎么证明的,这一句话实际上解释了为何前面令n和m为整数——大概是和勒让德函数的求解以及背后的物理原理有一定的联系…(实在是太高深,我已经尽力了/(ㄒoㄒ)/~~)
3.2.3 球谐函数表达式
由上面推导,可以得到面球谐函数的表达式:
{
Y
(
θ
,
λ
)
=
P
n
m
(
cos
θ
)
cos
m
λ
Y
(
θ
,
λ
)
=
P
n
m
(
cos
θ
)
sin
m
λ
\left\{ \begin{array}{c} Y\left( \theta ,\lambda \right) =P_{nm}\left( \cos \theta \right) \cos m\lambda\\ Y\left( \theta ,\lambda \right) =P_{nm}\left( \cos \theta \right) \sin m\lambda\\ \end{array} \right.
{Y(θ,λ)=Pnm(cosθ)cosmλY(θ,λ)=Pnm(cosθ)sinmλ
对于通解,则表示为线性组合:
Y
(
θ
,
λ
)
=
∑
m
=
0
n
[
a
n
m
P
n
m
(
cos
θ
)
cos
m
λ
+
b
n
m
P
n
m
(
cos
θ
)
sin
m
λ
]
Y\left( \theta ,\lambda \right) =\sum_{m=0}^n{\left[ a_{nm}P_{nm}\left( \cos \theta \right) \cos m\lambda +b_{nm}P_{nm}\left( \cos \theta \right) \sin m\lambda \right]}
Y(θ,λ)=m=0∑n[anmPnm(cosθ)cosmλ+bnmPnm(cosθ)sinmλ]
进而给出球谐函数表达式:
{
V
(
r
,
θ
,
λ
)
=
∑
n
=
0
∞
r
n
∑
m
=
0
n
[
a
n
m
P
n
m
(
cos
θ
)
cos
m
λ
+
b
n
m
P
n
m
(
cos
θ
)
sin
m
λ
]
V
(
r
,
θ
,
λ
)
=
∑
n
=
0
∞
1
r
n
+
1
∑
m
=
0
n
[
a
n
m
P
n
m
(
cos
θ
)
cos
m
λ
+
b
n
m
P
n
m
(
cos
θ
)
sin
m
λ
]
\left\{ \begin{array}{c} V\left( r,\theta ,\lambda \right) =\sum_{n=0}^{\infty}{r^n\sum_{m=0}^n{\left[ a_{nm}P_{nm}\left( \cos \theta \right) \cos m\lambda +b_{nm}P_{nm}\left( \cos \theta \right) \sin m\lambda \right]}}\\ \\V\left( r,\theta ,\lambda \right) =\sum_{n=0}^{\infty}{\frac{1}{r^{n+1}}\sum_{m=0}^n{\left[ a_{nm}P_{nm}\left( \cos \theta \right) \cos m\lambda +b_{nm}P_{nm}\left( \cos \theta \right) \sin m\lambda \right]}}\\ \end{array} \right.
⎩
⎨
⎧V(r,θ,λ)=∑n=0∞rn∑m=0n[anmPnm(cosθ)cosmλ+bnmPnm(cosθ)sinmλ]V(r,θ,λ)=∑n=0∞rn+11∑m=0n[anmPnm(cosθ)cosmλ+bnmPnm(cosθ)sinmλ]
其中我们主要关注球面以外的部分,并且考虑到函数的正则性,舍去r^n的形式而采用第二种。
上面的计算过程看起来似乎还算连贯,但其实还存在很多疑点,例如为什么球谐函数可以分离变量,为什么本征值可以这样表示,为什么这样的通解一定能满足所有情况…后来问了数院的同学,也没有搞懂,只好作罢。
接下来对勒让德函数展开讨论。
3.3 勒让德函数
勒让德函数是勒让德微分方程的一个解,等同于g(θ)。
3.3.1 表达式
令
{
t
=
cos
θ
g
(
θ
)
=
g
‾
(
t
)
=
P
n
m
(
t
)
\large \left\{ \begin{array}{c} t=\cos \theta\\ g\left( \theta \right) =\overline{g}\left( t \right) =P_{nm}\left( t \right)\\ \end{array} \right.
{t=cosθg(θ)=g(t)=Pnm(t)
代入微分方程得:
P
n
m
(
t
)
=
1
2
n
n
!
(
1
−
t
2
)
m
2
d
n
+
m
d
t
n
+
m
(
t
2
−
1
)
n
\large P_{nm}\left( t \right) =\frac{1}{2^nn!}\left( 1-t^2 \right) ^{\frac{m}{2}}\frac{d^{n+m}}{dt^{n+m}}\left( t^2-1 \right) ^n
Pnm(t)=2nn!1(1−t2)2mdtn+mdn+m(t2−1)n
准确地说该表达式是缔和勒让德函数。令m=0,则得到勒让德函数。
显式表达则需要将$(t2-1)n $展开,用阶乘来表达。
P
n
m
(
t
)
=
1
2
n
(
1
−
t
2
)
m
2
∑
k
=
0
r
(
−
1
)
k
(
2
n
−
2
k
)
!
k
!
(
n
−
k
)
!
(
n
−
m
−
2
k
)
!
t
n
−
m
−
2
k
P_{nm}\left( t \right) =\frac{1}{2^n}\left( 1-t^2 \right) ^{\frac{m}{2}}\sum_{k=0}^r{\left( -1 \right) ^k\frac{\left( 2n-2k \right) !}{k!\left( n-k \right) !\left( n-m-2k \right) !}t^{n-m-2k}}
Pnm(t)=2n1(1−t2)2mk=0∑r(−1)kk!(n−k)!(n−m−2k)!(2n−2k)!tn−m−2k其中阶乘数必须为正:
r
=
[
n
−
m
2
]
r=\left[ \frac{n-m}{2} \right]
r=[2n−m]
(之前还把求导过程推过一遍,但是笔记丢失了…懒得再打一遍,反正就是那么回事)
3.3.2 正交性
(缔和)勒让德函数具有正交性。
以m=0的情况——即勒让德函数——为例,其正交性表示为:
{
∫
−
1
1
P
n
(
x
)
P
m
(
x
)
d
x
=
2
2
n
+
1
δ
m
n
δ
m
n
=
{
1
,
m
=
n
0
,
m
≠
n
\left\{ \begin{array}{c} \int\limits_{-1}^1{P_n\left( x \right) P_m\left( x \right) dx}=\frac{2}{2n+1}\delta _{mn}\\ \\ \delta _{mn}=\left\{ \begin{array}{c} 1, m=n\\ 0, m\ne n\\ \end{array} \right.\\ \end{array} \right.
⎩
⎨
⎧−1∫1Pn(x)Pm(x)dx=2n+12δmnδmn={1,m=n0,m=n
假设一元函数y(x)可以展开成勒让德级数:
y
(
x
)
=
∑
n
=
0
∞
c
n
P
n
(
x
)
y\left( x \right) =\sum_{n=0}^{\infty}{c_nP_n\left( x \right)}
y(x)=n=0∑∞cnPn(x)
利用正交性求系数:
y
(
x
)
P
k
(
x
)
=
∑
n
=
0
∞
c
n
P
n
(
x
)
P
k
(
x
)
⇒
∫
−
1
1
y
(
x
)
P
k
(
x
)
d
x
=
∑
n
=
0
∞
(
∫
−
1
1
c
n
P
n
(
x
)
P
k
(
x
)
d
x
)
⇒
∫
−
1
1
y
(
x
)
P
k
(
x
)
d
x
=
c
k
∫
−
1
1
P
k
2
(
x
)
d
x
=
2
2
k
+
1
c
k
⇒
c
k
=
2
k
+
1
2
∫
−
1
1
y
(
x
)
P
k
(
x
)
d
x
y\left( x \right) P_k\left( x \right) =\sum_{n=0}^{\infty}{c_nP_n\left( x \right) P_k\left( x \right)} \\ \\ \Rightarrow \int\limits_{-1}^1{y\left( x \right) P_k\left( x \right) dx}=\sum_{n=0}^{\infty}{\left( \int\limits_{-1}^1{c_nP_n\left( x \right) P_k\left( x \right) dx} \right)} \\ \\ \\ \Rightarrow \int\limits_{-1}^1{y\left( x \right) P_k\left( x \right) dx}=c_k\int\limits_{-1}^1{P_{k}^{2}\left( x \right) dx}=\frac{2}{2k+1}c_k \\ \\ \\\Rightarrow c_k=\frac{2k+1}{2}\int\limits_{-1}^1{y\left( x \right) P_k\left( x \right) dx}
y(x)Pk(x)=n=0∑∞cnPn(x)Pk(x)⇒−1∫1y(x)Pk(x)dx=n=0∑∞
−1∫1cnPn(x)Pk(x)dx
⇒−1∫1y(x)Pk(x)dx=ck−1∫1Pk2(x)dx=2k+12ck⇒ck=22k+1−1∫1y(x)Pk(x)dx
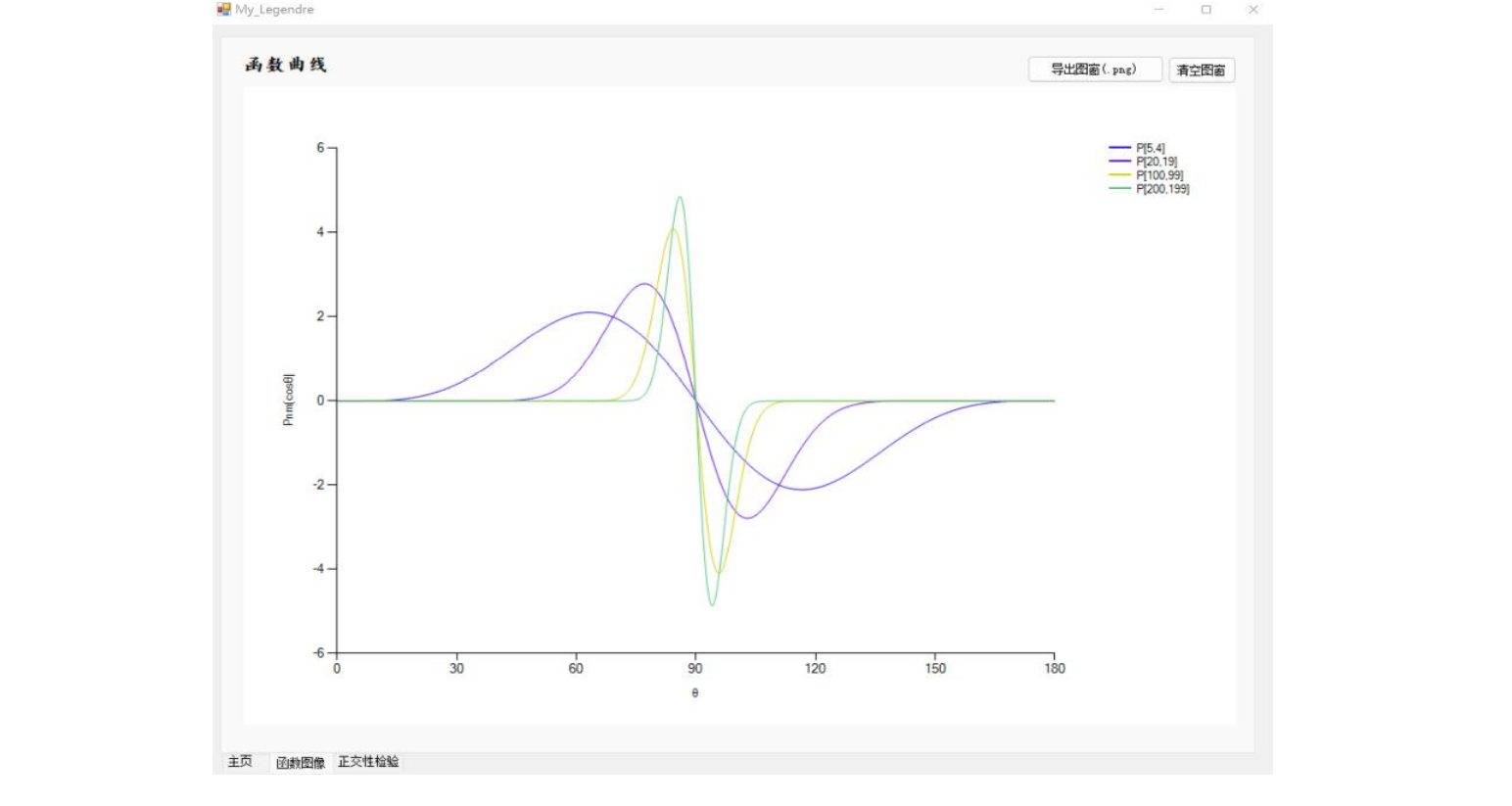
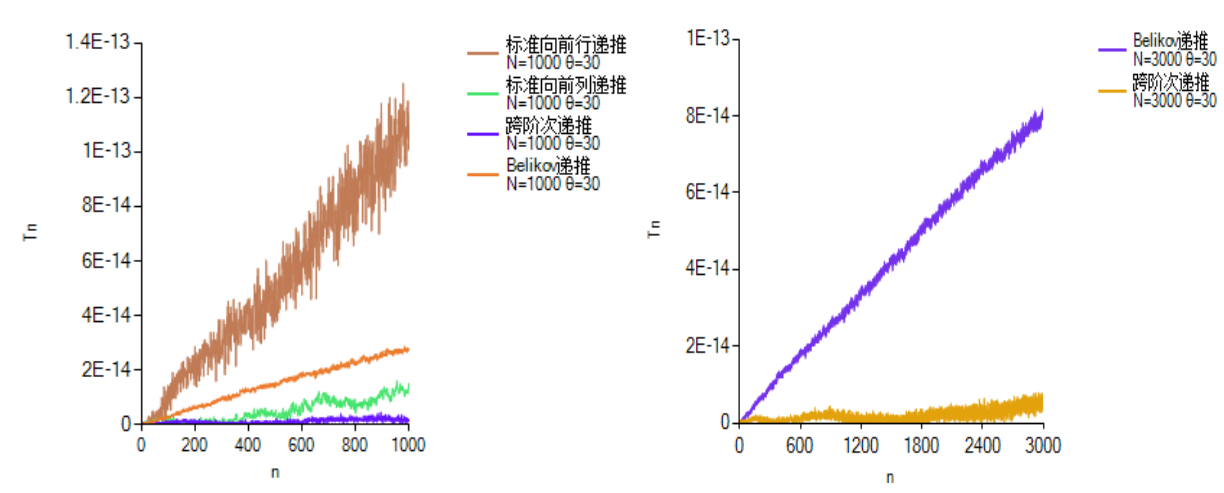
3.3.3 递推方法
从勒让德函数的显式表达可以看出,其阶乘的次数非常高,如果直接计算会相当费时,这也体现了递推的必要性。递推计算也是课程的第一次编程作业。
递推方法主要包括标准向前列、标准向前行、跨阶次、Belikov递推法。其中跨阶次递推精度最高,适用范围最广,是最好的递推方法。
具体的实验内容和源代码可以查看我发布的免费资源。这里就简单放一些我的实验报告截图:

3.4 面球谐函数
3.4.1 分类
根据m和n的大小关系,将面球谐函数分为以下几种:
带谐函数( m = 0 m=0 m=0)
田谐函数( m < n m<n m<n)
扇谐函数( m = n m=n m=n)
以n=3为例,从左往右m=0,1,2,3。谐函数将球面划分成正负交替的区域。
可以看到带谐函数是横向划分球体,而田谐函数将球面划分成格子状,带谐函数则竖向划分。

3.4.2 正交性
将面球谐函数记作如下形式:
{
R
n
m
(
θ
,
λ
)
=
P
n
m
(
cos
θ
)
cos
m
λ
S
n
m
(
θ
,
λ
)
=
P
n
m
(
cos
θ
)
sin
m
λ
\left\{ \begin{array}{c} R_{nm}\left( \theta ,\lambda \right) =P_{nm}\left( \cos \theta \right) \cos m\lambda\\ \\S_{nm}\left( \theta ,\lambda \right) =P_{nm}\left( \cos \theta \right) \sin m\lambda\\ \end{array} \right.
⎩
⎨
⎧Rnm(θ,λ)=Pnm(cosθ)cosmλSnm(θ,λ)=Pnm(cosθ)sinmλ
则有:
1. 单位球面上,任何两个不同的面球谐函数乘积的积分为0
{ ∬ σ R n m ( θ , λ ) R s r ( θ , λ ) d σ = 0 ∬ σ S n m ( θ , λ ) S s r ( θ , λ ) d σ = 0 } ( m , n ) ≠ ( s , r ) ∬ σ R n m ( θ , λ ) S s r ( θ , λ ) d σ = 0 i n a n y c a s e \left\{ \begin{array}{c} \left. \begin{array}{c} \iint\limits_{\sigma}{R_{nm}\left( \theta ,\lambda \right) R_{sr}\left( \theta ,\lambda \right)}d\sigma =0\\ \iint\limits_{\sigma}{S_{nm}\left( \theta ,\lambda \right) S_{sr}\left( \theta ,\lambda \right)}d\sigma =0\\ \end{array} \right\} \left( m,n \right) \ne \left( s,r \right)\\ \\ \iint\limits_{\sigma}{R_{nm}\left( \theta ,\lambda \right) S_{sr}\left( \theta ,\lambda \right)}d\sigma =0 \,\,\,\,\,\,\,\,\,\, in\,\,any\,\,case\,\, \end{array} \right. ⎩ ⎨ ⎧σ∬Rnm(θ,λ)Rsr(θ,λ)dσ=0σ∬Snm(θ,λ)Ssr(θ,λ)dσ=0⎭ ⎬ ⎫(m,n)=(s,r)σ∬Rnm(θ,λ)Ssr(θ,λ)dσ=0inanycase
2. 单位球面上,两个相同的面球谐函数乘积的积分为:
∬ σ R n m ( θ , λ ) R n m ( θ , λ ) d σ = ∬ σ S n m ( θ , λ ) S n m ( θ , λ ) d σ = { 2 π 2 n + 1 ( n + m ) ! ( n − m ) ! , m ≠ 0 4 π 2 n + 1 , m = 0 \iint\limits_{\sigma}{R_{nm}\left( \theta ,\lambda \right) R_{nm}\left( \theta ,\lambda \right)}d\sigma =\iint\limits_{\sigma}{S_{nm}\left( \theta ,\lambda \right) S_{nm}\left( \theta ,\lambda \right)}d\sigma =\left\{ \begin{array}{c} \frac{2\pi}{2n+1}\frac{\left( n+m \right) !}{\left( n-m \right) !}\,\, ,m\ne 0\\\\ \frac{4\pi}{2n+1}\,\, ,m=0\\ \end{array} \right. σ∬Rnm(θ,λ)Rnm(θ,λ)dσ=σ∬Snm(θ,λ)Snm(θ,λ)dσ=⎩ ⎨ ⎧2n+12π(n−m)!(n+m)!,m=02n+14π,m=0
3.4.3 完全正规化球谐函数
完全正规化,实际上就是让相同的面球谐函数乘积的积分为4π,也就是在球面上均值为1。
因此其改正其实就是上面公式的逆推,使得其积分为4π(包括m=0时)。
正规化的好处在于统一了m=0和m≠0的情况。
R
‾
n
m
(
θ
,
λ
)
=
{
2
(
2
n
+
1
)
(
n
−
m
)
!
(
n
+
m
)
!
R
n
m
(
θ
,
λ
)
,
m
≠
0
2
n
+
1
R
n
m
(
θ
,
λ
)
,
m
=
0
\overline{R}_{nm}\left( \theta ,\lambda \right) =\left\{ \begin{array}{c} \sqrt{2\left( 2n+1 \right) \frac{\left( n-m \right) !}{\left( n+m \right) !}}R_{nm}\left( \theta ,\lambda \right) \,\,, m\ne 0\\ \\ \sqrt{2n+1}R_{nm}\left( \theta ,\lambda \right) \,\,, m=0\\ \end{array} \right.
Rnm(θ,λ)=⎩
⎨
⎧2(2n+1)(n+m)!(n−m)!Rnm(θ,λ),m=02n+1Rnm(θ,λ),m=0
3.5 距离倒数的展开式
距离倒数的展开式是引力场展开为球谐函数的基本公式。这一部分书上和PPT其实都省去了很多重要的计算过程,暂时没有时间去深究,这里结合PPT和书梳理几个基本公式的关系。
首先利用球坐标表示两点:
P
(
r
,
θ
,
λ
)
,
P
′
(
r
′
,
θ
′
,
λ
)
P\left( r,\theta ,\lambda \right) , P'\left( r',\theta ',\lambda \right)
P(r,θ,λ),P′(r′,θ′,λ)设两点与原点连线的夹角为ψ,如图所示:

由余弦定理
l
2
=
r
2
+
r
′
2
−
2
r
r
′
cos
ψ
l^2=r^2+r'^2-2rr'\cos \psi
l2=r2+r′2−2rr′cosψ又因为ψ是两个矢量夹角,可以通过转换到直角坐标系后,计算矢量乘积得到其余弦值
r
θ
λ
:
(
1
,
θ
,
λ
)
,
(
1
,
θ
′
,
λ
′
)
⇒
x
y
z
:
(
sin
θ
cos
λ
,
sin
θ
sin
λ
,
cos
θ
)
,
(
sin
θ
′
cos
λ
′
,
sin
θ
′
sin
λ
′
,
cos
θ
′
)
⇒
cos
ψ
=
sin
θ
cos
λ
⋅
sin
θ
′
cos
λ
′
+
sin
θ
sin
λ
⋅
sin
θ
′
sin
λ
′
+
cos
θ
cos
θ
′
1
⋅
1
=
sin
θ
sin
θ
′
(
cos
λ
cos
λ
′
+
sin
λ
sin
λ
′
)
+
cos
θ
cos
θ
′
=
sin
θ
sin
θ
′
cos
(
λ
−
λ
′
)
+
cos
θ
cos
θ
′
r\theta \lambda : \left( 1,\theta ,\lambda \right) , \left( 1,\theta ',\lambda ' \right) \\ \Rightarrow xyz: \left( \sin \theta \cos \lambda ,\sin \theta \sin \lambda ,\cos \theta \right) , \left( \sin \theta '\cos \lambda ',\sin \theta '\sin \lambda ',\cos \theta ' \right) \\ \\ \Rightarrow \cos \psi =\frac{\sin \theta \cos \lambda \cdot \sin \theta '\cos \lambda '+\sin \theta \sin \lambda \cdot \sin \theta '\sin \lambda '+\cos \theta \cos \theta '}{1\cdot 1} \\ \\ =\sin \theta \sin \theta '\left( \cos \lambda \cos \lambda '+\sin \lambda \sin \lambda ' \right) +\cos \theta \cos \theta ' \\ =\sin \theta \sin \theta '\cos \left( \lambda -\lambda ' \right) +\cos \theta \cos \theta '
rθλ:(1,θ,λ),(1,θ′,λ′)⇒xyz:(sinθcosλ,sinθsinλ,cosθ),(sinθ′cosλ′,sinθ′sinλ′,cosθ′)⇒cosψ=1⋅1sinθcosλ⋅sinθ′cosλ′+sinθsinλ⋅sinθ′sinλ′+cosθcosθ′=sinθsinθ′(cosλcosλ′+sinλsinλ′)+cosθcosθ′=sinθsinθ′cos(λ−λ′)+cosθcosθ′
这里直接给出分解公式:
P
n
(
cos
ψ
)
=
P
n
(
cos
θ
)
P
n
(
cos
θ
′
)
+
2
∑
m
=
1
n
(
n
−
m
)
!
(
n
+
m
)
!
[
R
n
m
(
θ
,
λ
)
R
n
m
(
θ
′
,
λ
′
)
+
S
n
m
(
θ
,
λ
)
S
n
m
(
θ
′
,
λ
′
)
]
P_{n}\left( \cos \psi \right) \\ =P_{n}\left( \cos \theta \right) P_{n}\left( \cos \theta ' \right) +2\sum_{m=1}^n{\frac{\left( n-m \right) !}{\left( n+m \right) !}\left[ R_{nm}\left( \theta ,\lambda \right) R_{nm}\left( \theta ',\lambda ' \right) +S_{nm}\left( \theta ,\lambda \right) S_{nm}\left( \theta ',\lambda ' \right) \right]}
Pn(cosψ)=Pn(cosθ)Pn(cosθ′)+2m=1∑n(n+m)!(n−m)![Rnm(θ,λ)Rnm(θ′,λ′)+Snm(θ,λ)Snm(θ′,λ′)]
若使用完全正规化谐函数,则有:
P
n
(
cos
ψ
)
=
1
2
n
+
1
∑
m
=
1
n
[
R
‾
n
m
(
θ
,
λ
)
R
‾
n
m
(
θ
′
,
λ
′
)
+
S
‾
n
m
(
θ
,
λ
)
S
‾
n
m
(
θ
′
,
λ
′
)
]
P_{n}\left( \cos \psi \right) =\frac{1}{2n+1}\sum_{m=1}^n{\left[ \overline{R}_{nm}\left( \theta ,\lambda \right) \overline{R}_{nm}\left( \theta ',\lambda ' \right) +\overline{S}_{nm}\left( \theta ,\lambda \right) \overline{S}_{nm}\left( \theta ',\lambda ' \right) \right]}
Pn(cosψ)=2n+11m=1∑n[Rnm(θ,λ)Rnm(θ′,λ′)+Snm(θ,λ)Snm(θ′,λ′)]
对距离倒数进行展开:
1
l
=
∑
n
=
0
∞
r
′
n
r
n
+
1
P
n
(
cos
ψ
)
\frac{1}{l}=\sum_{n=0}^{\infty}{\frac{r'^n}{r^{n+1}}P_n\left( \cos \psi \right)}
l1=n=0∑∞rn+1r′nPn(cosψ)
这个公式的形式很容易理解,因为
r
,
r
′
,
l
r,r',l
r,r′,l 三个数相近,采用这样的形式可以使得左右数量级一致。
将分解公式代入得到完整展开式:
1
l
=
∑
n
=
0
∞
r
′
n
r
n
+
1
1
2
n
+
1
∑
m
=
1
n
[
R
‾
n
m
(
θ
,
λ
)
R
‾
n
m
(
θ
′
,
λ
′
)
+
S
‾
n
m
(
θ
,
λ
)
S
‾
n
m
(
θ
′
,
λ
′
)
]
\frac{1}{l}=\sum_{n=0}^{\infty}{\frac{r'^n}{r^{n+1}}\frac{1}{2n+1}\sum_{m=1}^n{\left[ \overline{R}_{nm}\left( \theta ,\lambda \right) \overline{R}_{nm}\left( \theta ',\lambda ' \right) +\overline{S}_{nm}\left( \theta ,\lambda \right) \overline{S}_{nm}\left( \theta ',\lambda ' \right) \right]}}
l1=n=0∑∞rn+1r′n2n+11m=1∑n[Rnm(θ,λ)Rnm(θ′,λ′)+Snm(θ,λ)Snm(θ′,λ′)]
这一函数被称为母函数。

















 2281
2281

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









