







 该博客介绍了一个基于Arduino的物联网项目开发过程,包括创建开发板、添加GPS模块和仿真串口的步骤。文章详细讲解了如何解析GPS模块发送的$GPRMC数据,包括时间、位置、速度等信息,并提供了错误处理函数。代码示例展示了如何存储和处理接收到的GPS数据,以便在物联网应用中使用。
该博客介绍了一个基于Arduino的物联网项目开发过程,包括创建开发板、添加GPS模块和仿真串口的步骤。文章详细讲解了如何解析GPS模块发送的$GPRMC数据,包括时间、位置、速度等信息,并提供了错误处理函数。代码示例展示了如何存储和处理接收到的GPS数据,以便在物联网应用中使用。
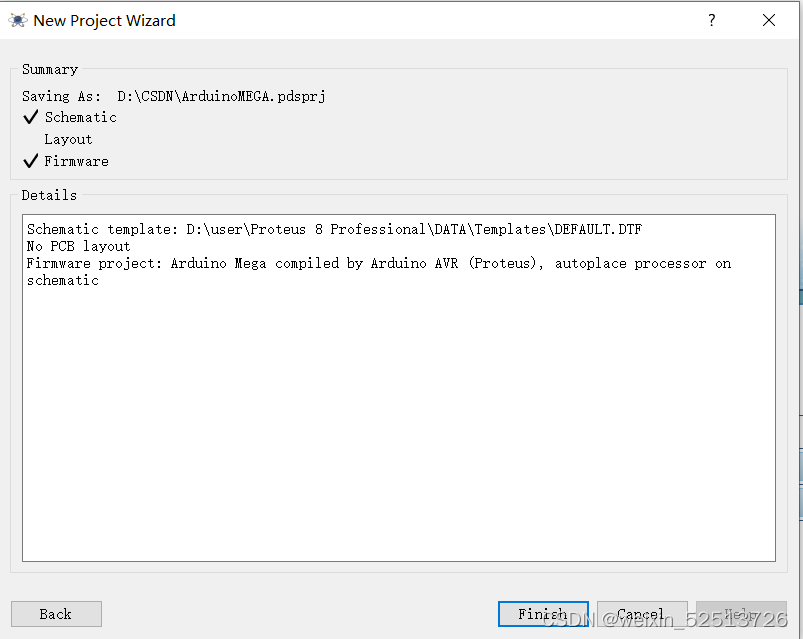
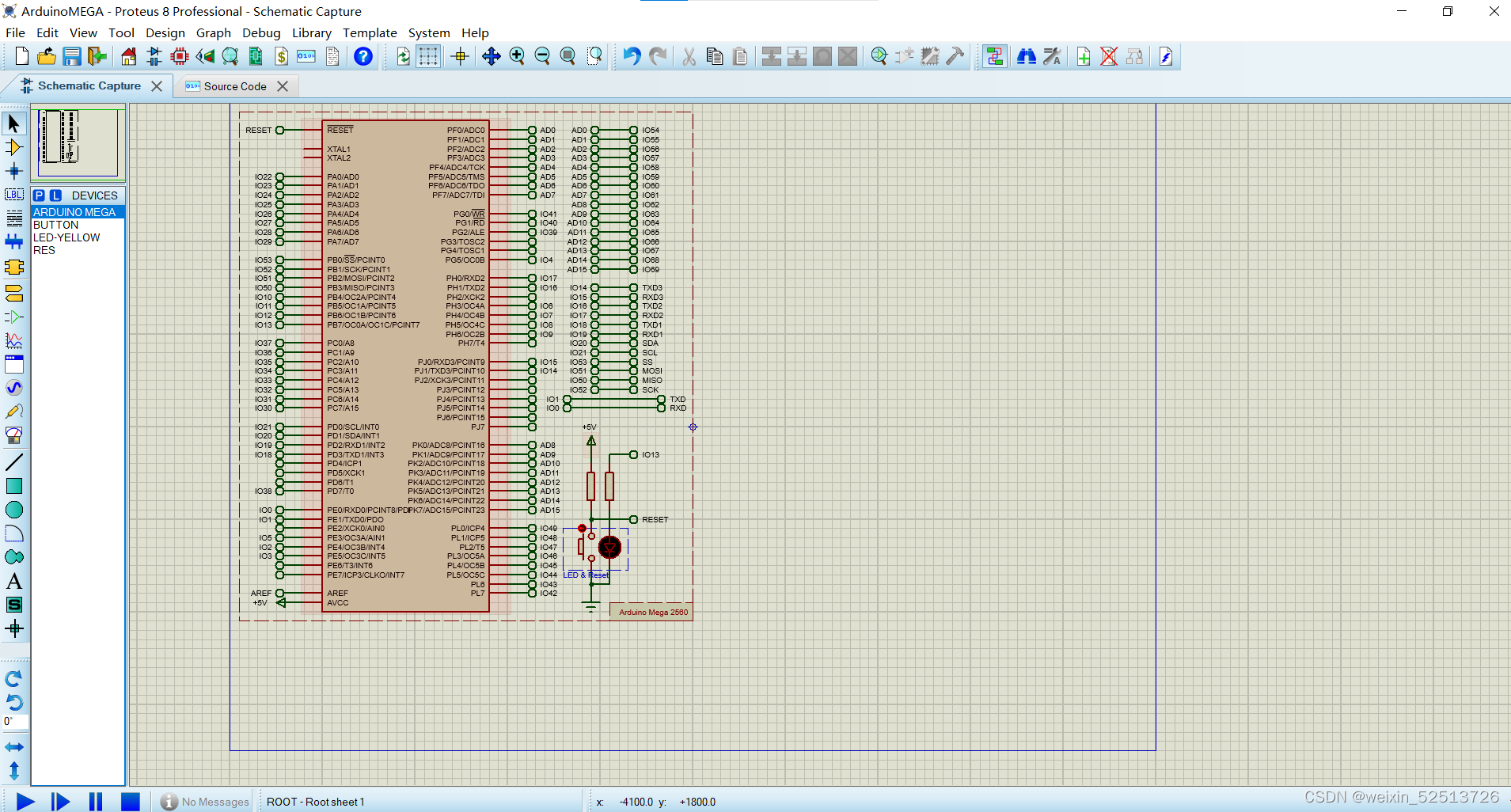
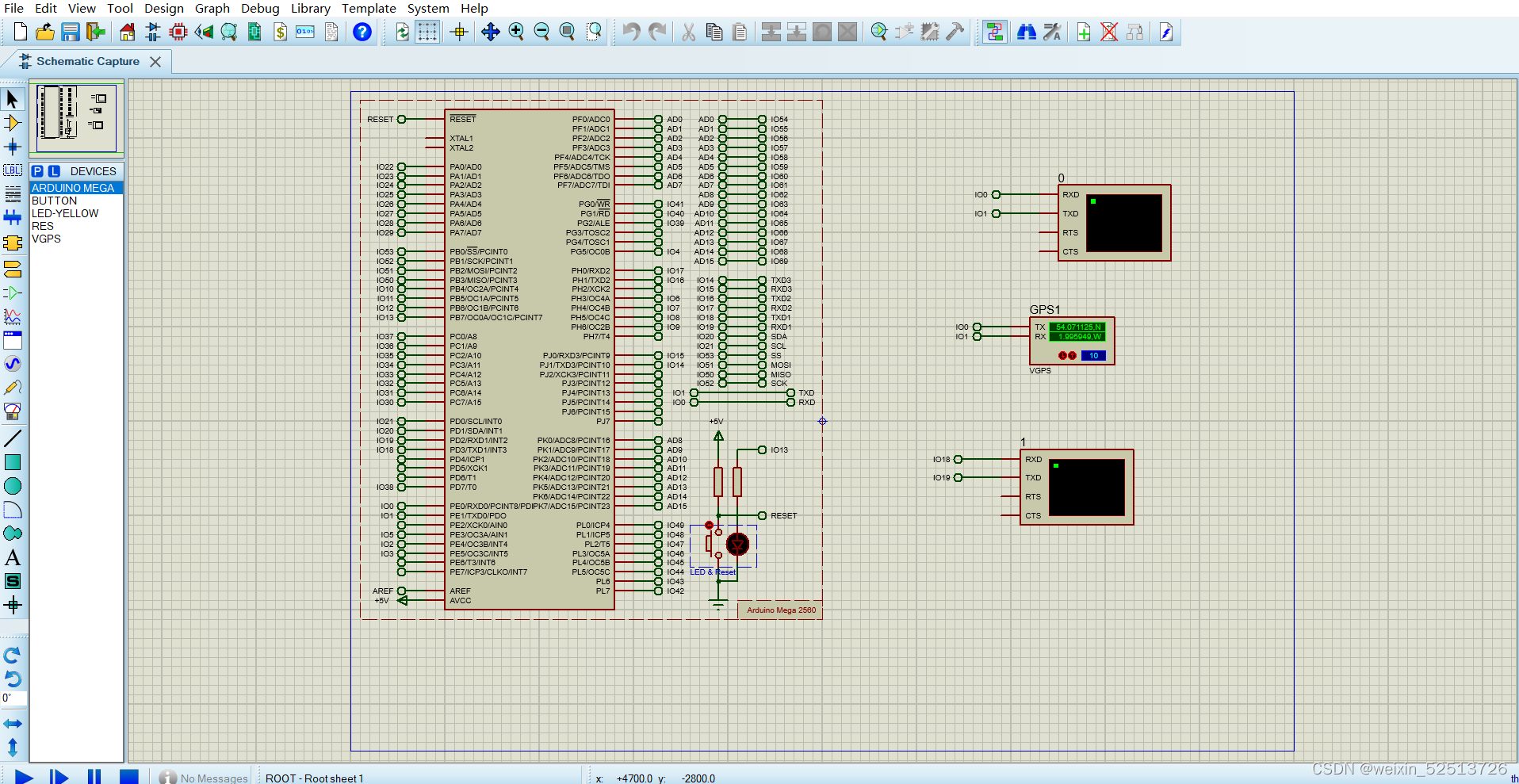
第一步:创建开发板,选择对应的型号
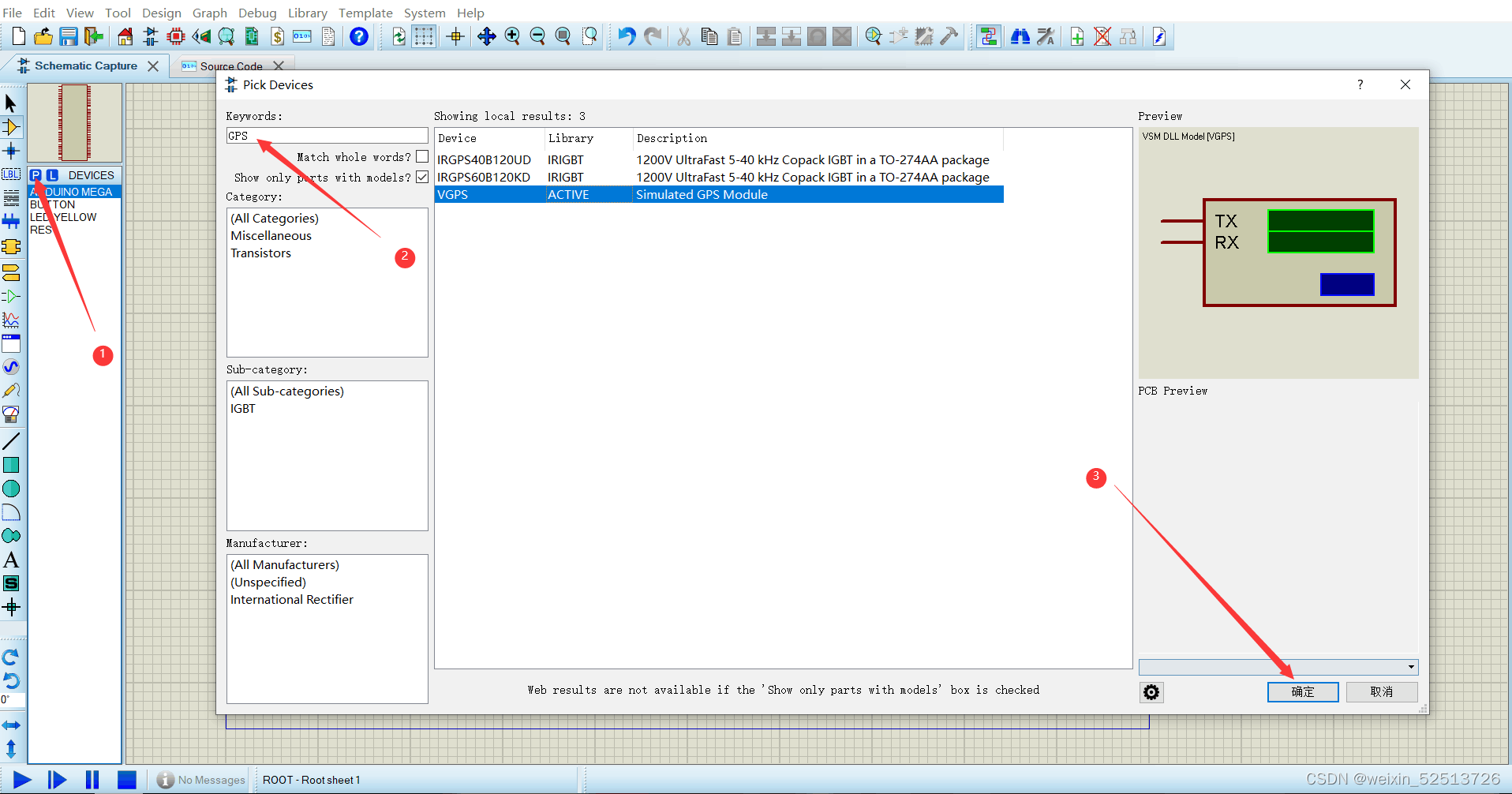
第二步:添加GPS模块
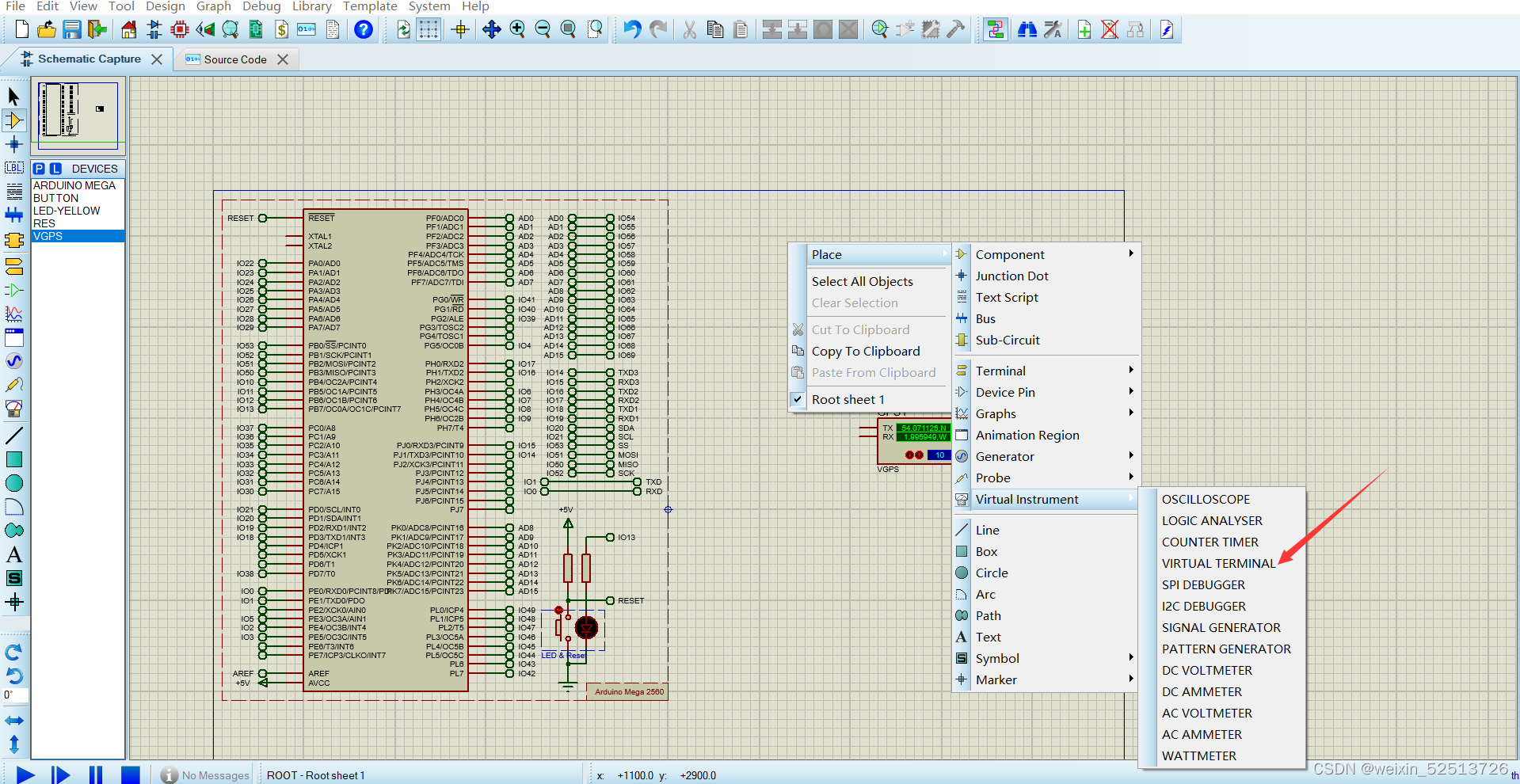
第三步:添加仿真串口
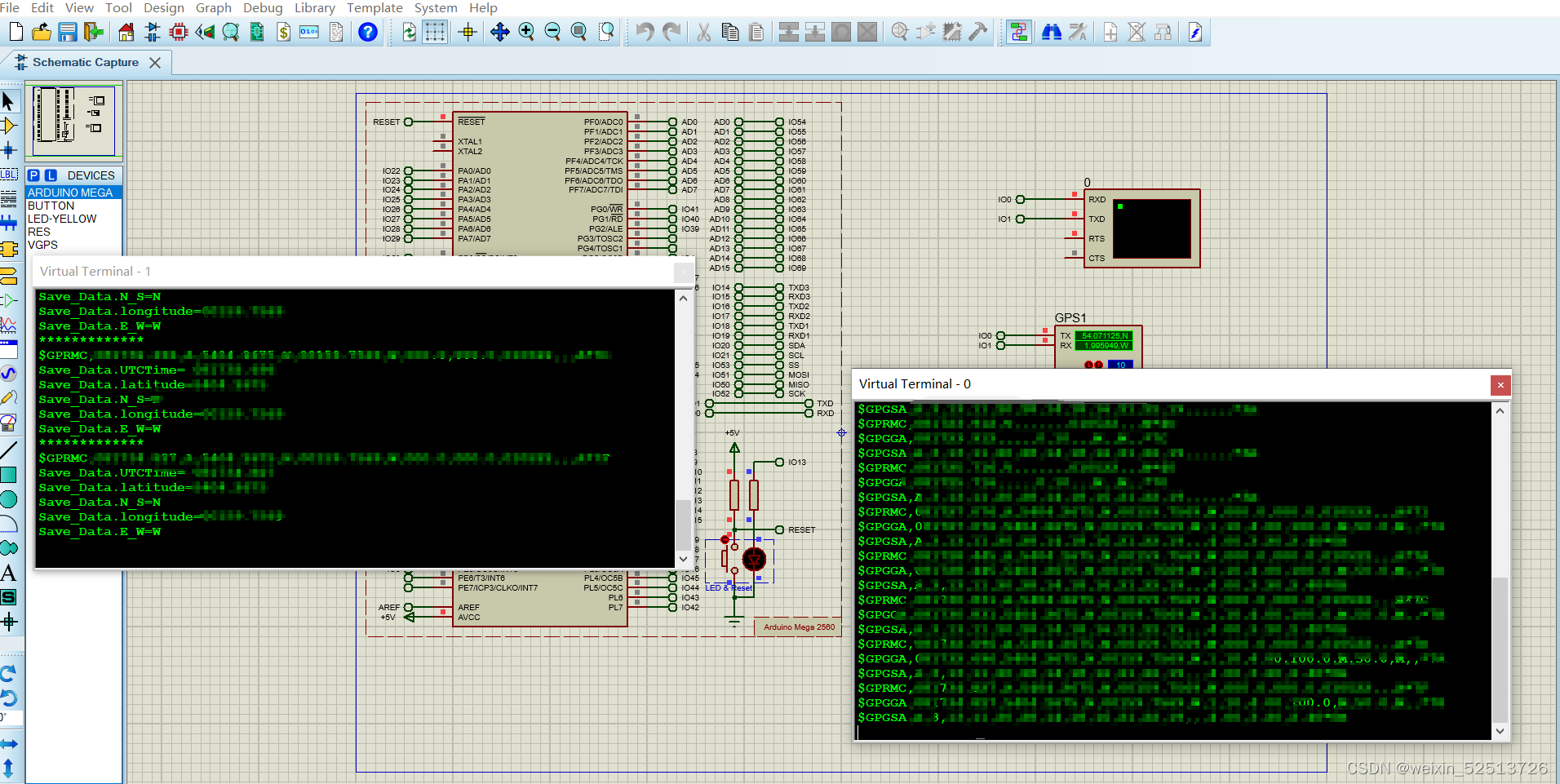
第四步:代码烧进去
二,代码部分
$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>*hh
<1> UTC时间,hhmmss(时分秒)格式 08 时20 分06 秒
<2> 定位状态,A=有效定位,V=无效定位
<3> 纬度ddmm.mmmm(度分)格式(前面的0也将被传输) 北纬38 度52.9276 分
<4> 纬度半球N(北半球)或S(南半球)
<5> 经度dddmm.mmmm(度分)格式(前面的0也将被传输) 东经115 度27.4283 分
<6> 经度半球E(东经)或W(西经)
<7> 地面速率(000.0~999.9节,前面的0也将被传输)
<8> 地面航向(000.0~359.9度,以真北为参考基准,前面的0也将被传输)
<9> UTC日期,ddmmyy(日月年)格式 26日10月09年
<10> 磁偏角(000.0~180.0度,前面的0也将被传输)
<11> 磁偏角方向,E(东)或W(西)
<12> 模式指示(仅NMEA0183 3.00版本输出,A=自主定位,D=差分,E=估算,N=数据无效)
注意几点:
1、当GPS数据有效时第17位(一般情况下,程序里最好是找第二个逗号在取下一位判断)为“A”,无效时为“V”;
2、GPS有效时,当速度为0时显示0.0(两位数),当速度不为0时小数点前面数据根据情况变化,最大为三位,此处速度单位为节(海里),需要做处理才能得到我们习惯的单位(公里/小时);
3、GPS无效时,除了第17位显示V以外,不输入速度,角度数据;
4、当给GPS复位时第17位为V,不输出速度,角度,时间数据。
代码参考:Arduino项目开发:物联网应用
#define GPSSerial Serial
#define DEBUGSerial Serial1 //注意这里一定义
int L=13; //LED指示灯的引脚
struct {
char GPS_Buffer[80];
bool isGetData; //是否获取到GPS数据
bool isParseData; //是否解析完成
char UTCTime[11]; //UTC时间
char latitude[11]; //维度
char N_S[2]; //N/S
char longitude[12]; //经度
char E_W[2]; //E/W
bool isUsefull; //定位信息是否有效
}Save_Data;
const unsigned int gpsRxBufferLength=600;
char gpsRxBuffer[gpsRxBufferLength];
unsigned int ii=0;
void setup() { //初始化部分
GPSSerial.begin(9600); //定义波特率9600
DEBUGSerial.begin(9600);
pinMode(L,OUTPUT);
DEBUGSerial.println("Wating....");
Save_Data.isGetData=false; //结构体初始化
Save_Data.isParseData=false;
Save_Data.isUsefull=false;
}
void loop() {
gpsRead(); //获取GPS数据
parseGpsBuffer(); //解析GPS数据
printGpsBuffer(); //输出解析后的数据
}
/*---------------解析 错误时函数----------------------------*/
void errorLog(int num) //解析错误
{
DEBUGSerial.print("ERROR");
DEBUGSerial.println(num);
while(1)
{
digitalWrite(L,HIGH);
delay(300);
digitalWrite(L,LOW);
delay(300);
}
}
/*----------------获取 GPS 数据-------------------------------*/
void gpsRead() //获取GPS数据
{
while(GPSSerial.available())
{
gpsRxBuffer[ii++]=GPSSerial.read();
//Serial1.println(ii);
if(ii==gpsRxBufferLength)clrGpsRxBuffer(); //判断是否到达最大,600
}
char *GPS_BufferHead;
char *GPS_BufferTail;
if((GPS_BufferHead=strstr(gpsRxBuffer,"$GPRMC,"))!=NULL|| (GPS_BufferHead=strstr(gpsRxBuffer, "$GNRMC,"))!=NULL) //判断接受到数据是否为 $GNRMC 或 $GPRMC
{
//Serial1.println("");
if(((GPS_BufferTail=strstr(GPS_BufferHead,"\r\n"))!=NULL)&&(GPS_BufferTail>GPS_BufferHead)) //判断换行符,
{
memcpy(Save_Data.GPS_Buffer,GPS_BufferHead,GPS_BufferTail-GPS_BufferHead); //将数据存储到,结构数据位
Save_Data.isGetData=true;
clrGpsRxBuffer(); //清空
}
}
}
/*---------------获取数据达到 最大值-----------------------------*/
void clrGpsRxBuffer(void)
{
memset(gpsRxBuffer,0,gpsRxBufferLength); //清空
ii=0;
}
/*-------------------解析 GPS 数据-----------------------------*/
void parseGpsBuffer()
{
char *subString;
char *subStringNext;
//Serial1.println("start.....");
if(Save_Data.isGetData)
{
Save_Data.isGetData=false;
DEBUGSerial.println("*************");
DEBUGSerial.println(Save_Data.GPS_Buffer); //输出读取的数据
for(int i=0;i<7;i++)
{
if(i==0)
{
if((subString=strstr(Save_Data.GPS_Buffer,","))==NULL) //从结构体中查找,是否有 ,如果存在返回第一次出现的逗号地址
errorLog(1); //解析错误
}
else
{
subString++;//Serial1.print(i );Serial1.println(subStringNext);
if((subStringNext=strstr(subString,","))!=NULL) //从结构体中查找,是否有 ,如果存在返回第一次出现的逗号地址开始
{
char usefullBuffer[2];
switch(i)
{
case 1:memcpy(Save_Data.UTCTime,subString,subStringNext-subString);
break; //获取UTC 时间
case 2:memcpy(usefullBuffer,subString,subStringNext-subString);
break; //获取UTC时间
case 3:memcpy(Save_Data.latitude,subString,subStringNext-subString);
break; //获取维度信息
case 4:memcpy(Save_Data.N_S,subString,subStringNext-subString);
break; //获取 N/S
case 5:memcpy(Save_Data.longitude,subString,subStringNext-subString);
break; //获取经度信息
case 6:memcpy(Save_Data.E_W,subString,subStringNext-subString);
break; //获取 E/W
default:break;
}
subString=subStringNext;
Save_Data.isParseData=true;
if(usefullBuffer[0]=='A')
Save_Data.isUsefull=true;
else if(usefullBuffer[0]=='V')
Save_Data.isUsefull=false;
}
else
{
errorLog(2); //解析错误
}
}
}
}
}
/*----------输出 解析后的数据--------------------*/
void printGpsBuffer()
{
if(Save_Data.isParseData)
{
Save_Data.isParseData=false;
DEBUGSerial.print("Save_Data.UTCTime= ");
DEBUGSerial.println(Save_Data.UTCTime);
if(Save_Data.isUsefull)
{
Save_Data.isUsefull=false;
DEBUGSerial.print("Save_Data.latitude=");
DEBUGSerial.println(Save_Data.latitude);
DEBUGSerial.print("Save_Data.N_S=");
DEBUGSerial.println(Save_Data.N_S);
DEBUGSerial.print("Save_Data.longitude=");
DEBUGSerial.println(Save_Data.longitude);
DEBUGSerial.print("Save_Data.E_W=");
DEBUGSerial.println(Save_Data.E_W);
}
else
{
DEBUGSerial.println("GPS DATA is not usefull!");
Serial1.println("");
Serial1.print("\n\n");
}
}
}
















 2322
2322

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









