







基于51单片机的PWM控制直流电机设计( proteus仿真+程序+报告+讲解视频)
仿真图proteus 7.8及以上
程序编译器:keil 4/keil 5
编程语言:C语言
设计编号:S0031
视频
基于51单片机的PWM控制直流电机设计
主要功能:
1.设计要求
采用51单片机作为核心控制器,控制直流电机的正转,反转,制动,停止。
2.功能要求
1)数码管显示当前转动方向和当前的PWM占空比0~100%。
2)电机(L298n)转速可以通过按键调整,也可以开始暂停,正转和反转。
3)按键可实现加速、减速、正转、反转、停止等功能。
1键:加速键,短按,占空比加1;
2键:减速键,短按,占空比减1;
3键:正反转切换键,按下后电机正反转;
4键:按一下停止,PWM脉宽清零。
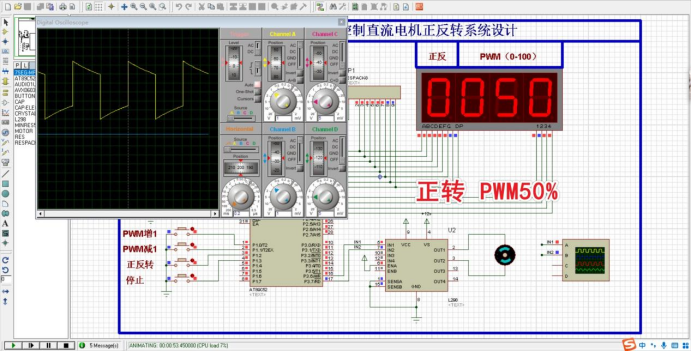
仿真
开始仿真后,用数码管第一位显示0表示正转后面三位标志PWM脉宽(0-100), 示波器实时检测显示脉宽黄线是正转脉宽,蓝线是反转脉宽。
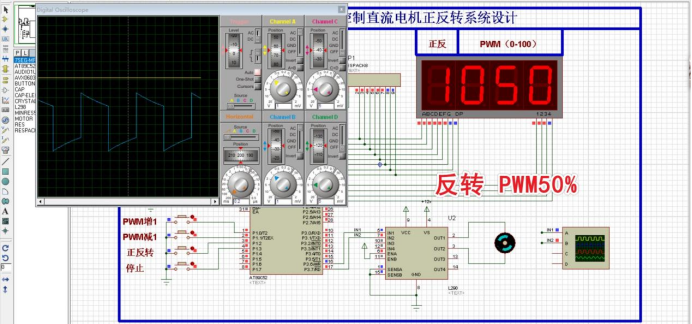
反转脉宽如下所示
程序:
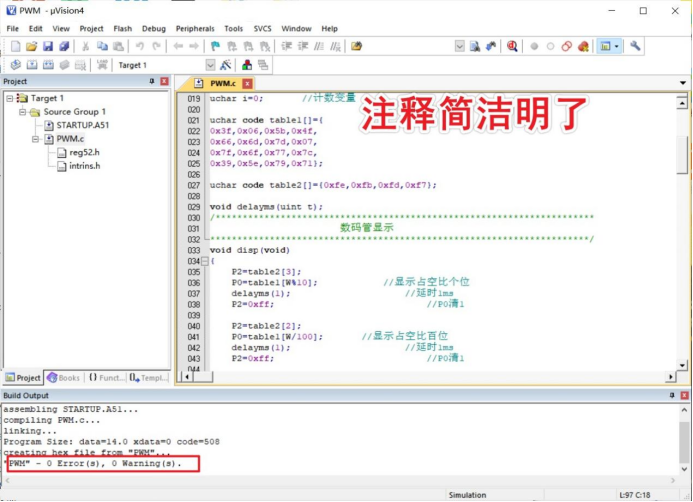
部分代码:
#include<reg52.h>
#include<intrins.h>
#define uchar unsigned char
#define uint unsigned int
/**********************************************************************
L298n接口定义
**********************************************************************/
sbit MOTOR_A_1=P3^6;
sbit MOTOR_A_2=P3^7;
sbit k1=P1^0; //定义k1为p1.0口
sbit k2=P1^1; //定义k2为p1.1口
sbit k3=P1^2; //定义k3为p1.2口
sbit k4=P1^3; //定义k4为p1.3口
uchar T=0; //定时标记
uchar W=0; //脉宽值 0~100
uchar A=0; //方向标记 0,1
uchar k=0; //按键标记
uchar i=0; //计数变量
uchar code table1[]={
0x3f,0x06,0x5b,0x4f,
0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,
0x39,0x5e,0x79,0x71};
uchar code table2[]={0xfe,0xfb,0xfd,0xf7};
void delayms(uint t);
/**********************************************************************
数码管显示
**********************************************************************/
void disp(void)
{
P2=table2[3];
P0=table1[W%10]; //显示占空比个位
delayms(1); //延时1ms
P2=0xff; //P0清1
P2=table2[2];
P0=table1[W/100]; //显示占空比百位
delayms(1); //延时1ms
P2=0xff; //P0清1
P2=table2[1];
P0=table1[W/10%10]; //显示占空比十位
delayms(1); //延时1ms
P2=0xff; //P0清1
P2=table2[0];
P0=table1[A]; //显示方向
delayms(1); //延时1ms
P2=0xff; //P0清1
}
/**********************************************************************
定时器变量定义
**********************************************************************/
void init(void)
{
//启动中断
TMOD=0x01;
EA=1;
ET0=1;
TR0=1;
//设置定时时间
TH0=0xff;
TL0=0xf6;
}
/**********************************************************************
延时1ms
**********************************************************************/
void delayms(uint t)
{
uchar j;
while(t--)
{
for(j=0;j<250;j++) //循环250次
{
_nop_(); //系统延时
_nop_(); //系统延时
_nop_(); //系统延时
_nop_(); //系统延时
}
}
}
/**********************************************************************
独立按键检测
**********************************************************************/
void key(void) //按键判断程序
{
if(k1==0) //按键1按下
{
while(k1==0); //按键1抬起
if(W==100) //如果脉宽为100
W=0; //脉宽置0
else
W+=1; //否则加1
}
else if(k2==0) //按键2按下
{
while(k2==0); //按键2抬起
if(W==0) //如果脉宽为0
W=100; //脉宽设置成100
else
W-=1; //否则减1
}
else if(k3==0) //按键3按下
{
while(k3==0); //按键3抬起
A=!A; //方向标记取反
k=!k; //按键标记取反
}
else if(k4==0) //按键4按下
{
while(k4==0); //按键4抬起
W=0; //脉宽清0
}
}
void main(void)
{
init(); /系统初始化
while(1)
{
if(k==0)
MOTOR_A_2=0;
else
MOTOR_A_1=0;
key(); 查询按键
}
}
设计报告
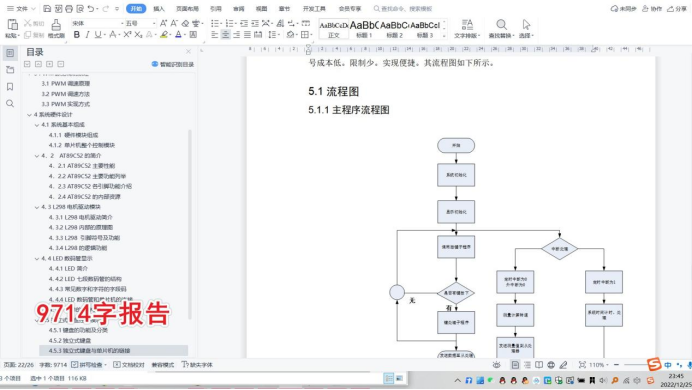
资料清单:
下载方式见开头的视频
或下方百度云分享链接
https://docs.qq.com/doc/DS1RGSmxKQUZOa0dT


















 6749
6749

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











