






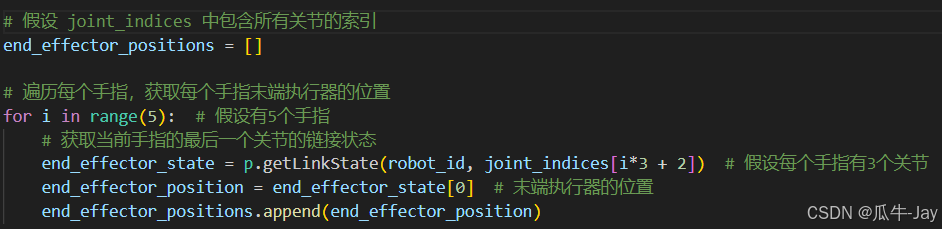
取机器人末端执行器

但是假肢手系统有五个末端执行器,假设假设每个手指有3个关节(例如基部、中节、指尖关节),这样每个手指对应 joint_indices 中的连续3个索引。如果有5个手指,那么每个手指的最后一个关节会对应 i*3 + 2,其中 i 是手指的索引(从0到4)
---------------------------------------------------------------------------------------------------------------------------------报错
将![]()
修改为:end_effector_positions.extend(end_effector_position) # 将末端执行器的位置添加到列表中
将奖励
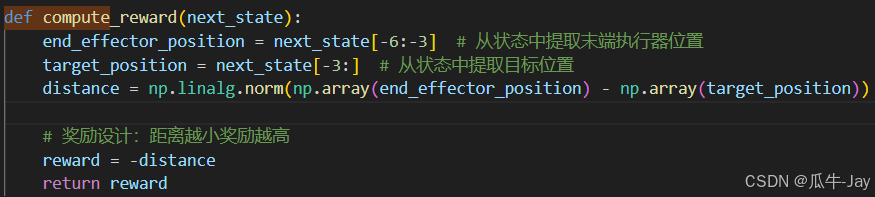
修改成
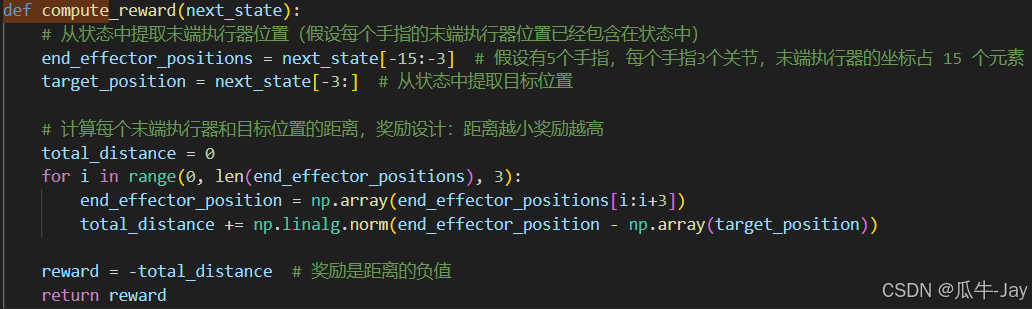
或者通过检索joint_indices的分布

再修改相应的奖励函数


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









