







 本文介绍了一种在MATLAB中实现的弧长法,用于求解非线性方程,特别适用于处理奇异方程和追踪解路径。通过示例展示了如何构造非线性系统、雅可比矩阵并应用牛顿-拉弗森迭代,以及如何处理边界条件和调整弧长参数。
本文介绍了一种在MATLAB中实现的弧长法,用于求解非线性方程,特别适用于处理奇异方程和追踪解路径。通过示例展示了如何构造非线性系统、雅可比矩阵并应用牛顿-拉弗森迭代,以及如何处理边界条件和调整弧长参数。
弧长法(Arc-length method)主要用于求解非线性方程和方程组,尤其是在需要追踪解路径,特别是当解可能遇到鞍点或拐点时。这个方法通过将非线性问题转化为等价的参数化问题来工作,参数即为弧长。
对于奇异方程(即可能具有不同解的方程),弧长法特别有用,因为它允许方程在解的分岔点附近继续追踪路径。
下面是一个用弧长法求解奇异方程的简单例子,演示了如何在MATLAB中实现基本的弧长法,并且在图像中体现奇异点的性质。我们考虑以下非线性方程:
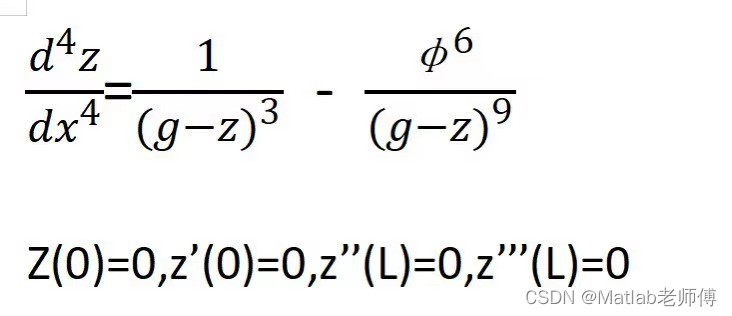
其中g和原子间平衡距离()是参数,L为[0,x]的取值
arc_length_continuation
function arc_length_continuation()
% 设置参数
g = 10; % 示例参数
phi = 1; % 示例参数
L = 10; % 示范用的区间长度
N = 100; % 网格分割数
ds = 0.01; % 弧长步长
tol = 1e-6; % 容差
% 初始化网格
dx = L / N;
x = linspace(0, L, N+1)';
% 初始解和初始lambda值
z = zeros(N+1, 1); % 初始解
lambda = 0; % 弧长参数初始化
% 主循环
while true
% 构建非线性方程组
F = build_nonlinear_system(z, dx, g, phi, N);
% 应用边界条件 (注意这里传递 dx)
F = apply_boundary_conditions(F, z, L, N, dx);
% 构建雅可比矩阵
J = build_jacobian(z, dx, g, phi, N);
% 牛顿-拉弗森迭代解决非线性系统
delta_z = -J\F;
z = z + delta_z;
% 更新弧长参数
dl = sqrt(dx^2 + sum(delta_z.^2));
if abs(dl - ds) / ds > tol
% 调整解以匹配预定的弧长步长
z = z * (ds / dl);
end
% 增加弧长参数
lambda = lambda + ds;
% 检查是否达到预定的弧长
if lambda >= L
break;
end
end
% 绘制结果
plot(x, z);
end
function F = build_nonlinear_system(z, dx, g, phi, N)
F = zeros(N+1, 1);
for i = 3:N-1
F(i) = (z(i-2) - 4*z(i-1) + 6*z(i) - 4*z(i+1) + z(i+2)) / dx^4 ...
- 1 / (g - z(i))^3 + phi^6 / (g - z(i))^9;
end
end
function J = build_jacobian(z, dx, g, phi, N)
J = zeros(N+1);
for i = 3:N-1
J(i, i-2:i+2) = [1, -4, 6, -4, 1] / dx^4;
J(i, i) = J(i, i) - ( -3 * 1 / (g - z(i))^4 + 9 * phi^6 / (g - z(i))^10 );
end
end
function F = apply_boundary_conditions(F, z, L, N, dx)
F(1) = z(1); % Z(0) = 0
F(2) = (z(3) - z(1)) / (2*dx); % Z'(0) = 0, 中心差分
F(N) = (z(N+1) - 2*z(N) + z(N-1)) / dx^2; % Z''(L) = 0, 中心差分
F(N+1) = (z(N+1) - 3*z(N) + 3*z(N-1) - z(N-2)) / (dx^3); % Z'''(L) = 0, 中心差分
end
请注意,弧长法的实现和性能可能会根据问题的具体细节而有所不同,这里提供的代码仅作为一个示例,可能需要针对特定问题进行调整。如果有相关问题欢迎留言咨询,或者关注VX公众号Mat作业远程进行1V1的解答。

















 8592
8592

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









