







 本文详细介绍了如何从测量LED尺寸、制作固定孔、焊接LED到编程Arduino实现光立方的动态显示,为爱好者提供了一个完整的LED光立方制作过程。
本文详细介绍了如何从测量LED尺寸、制作固定孔、焊接LED到编程Arduino实现光立方的动态显示,为爱好者提供了一个完整的LED光立方制作过程。
3X3X3 LED光立方
简介:吾犹喜爱LED光污染,自亲眼所见YouTube大神与bilibili up主所制作光立方,心有所想,便想自己动手实践。所做光立方为3X3X3大小,若成功,便将其升级。
| 材料名称 | 数量 | 备注 |
| 5mmLED | 27 | 尽量是彩色LED |
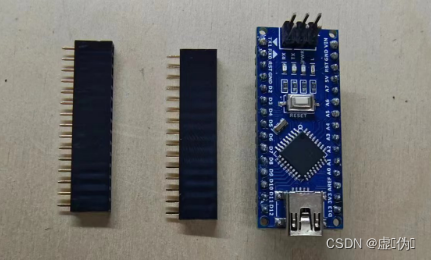
| arduino | 1 | / |
| 洞洞板 | 1 | / |
| 排母 | 2 | 1 X 15 |
| 电阻 | 9 | 100-330Ω都行 |
| 线 | / | / |
话不多说,走曲
虚҉伪҉ (Huski)原创
![]()
步骤1:前言
工欲善其事必先利其器。
尺子必须要用,当你的每层3X3led焊接好后,不能有太大的弯曲度,否则你得重新做一遍

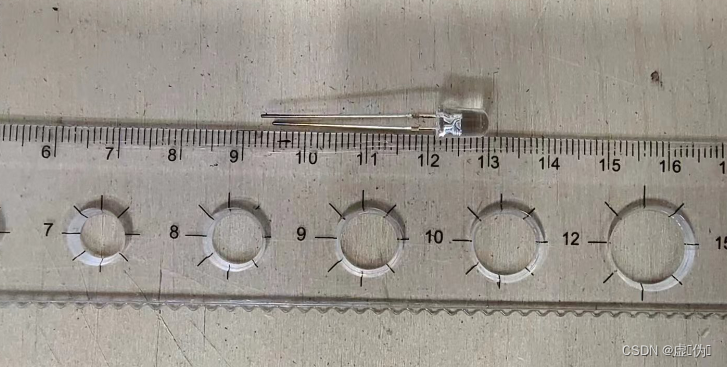
步骤2:测量LED尺寸
在焊接LED之前,需要先用尺子测量LED的引脚长度、大小(LED灯珠的直径),保障制作固定孔的时候,每个LED都能连接上,也不会有太多的余量,更能使LED焊接出来的效果跟家美观。

步骤3:固定孔材料
接下来就需要使用某种材料来固定LED了,我使用的是木板,在这里,我并不推荐你使用纸页来当作LED固定孔,因为纸过于薄了,并不能很好的固定led

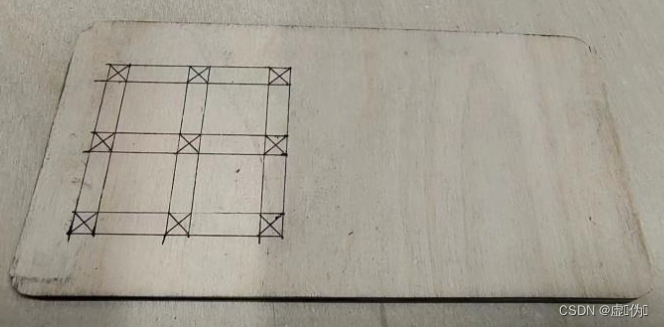
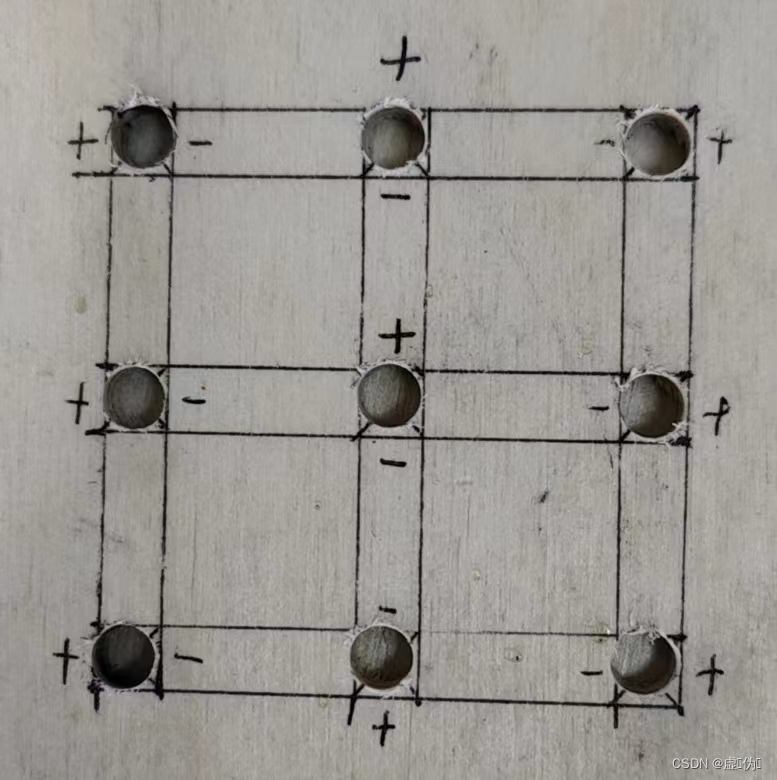
步骤4:规划LED固定孔
由第二步测量得知,LED的直径为5mm,LED引脚长度不能太长也不能太短,取15mm即可
再拿出尺子和笔,画出LED的位置
步骤5:钻头选取
钻孔的时候要确定使用的钻头是否为5mm,选好之后还需要比对一下
如果钻的孔大了,LED放进去会晃动,起不到固定的作用,过于小了,LED又放不进去,还是不行。

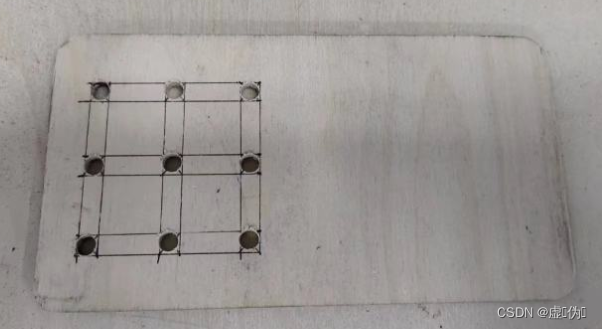
步骤6:钻孔
到了这一步就可以开始钻孔了,保证你的钻头尖部和画好的LED方格对角线是同一垂直线,小心钻歪了,影响美观

步骤7:折叠LED引脚
为了使上层的LED的引脚有效的连接下层的LED引脚,我们需要折弯LED引脚,避开灯珠
折弯的引脚为正极,负极不动
(注意:长脚为正,短脚为负)

步骤8:放置LED灯前的准备工作/注意事项
在此之前,我需要注意,每层的LED引脚朝向都需要一致,否则上层的LED引脚连接不到下层的LED引脚,为此,我特意在LED固定孔旁边又标记了每个LED的引脚方向。标记好后,固定孔的方向就需要保持不动。
步骤9:开始放置LED灯
将LED灯珠按照画好的正负极依次摆放,并将所有负极折弯相连接。
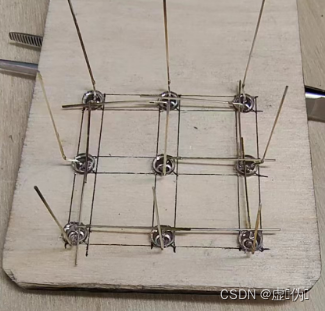
连接好后,再使用烙铁将刚才压弯连接到一起的负极依次焊接即可。
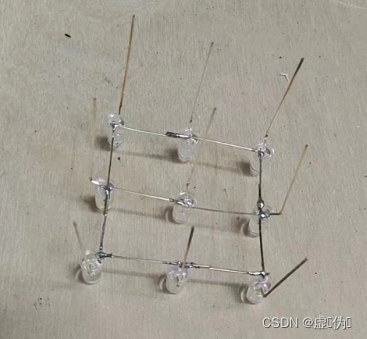
步骤10:制作第二和第三层LED
另外两层需按照固定孔放置并焊接,切记:固定孔不要乱移动
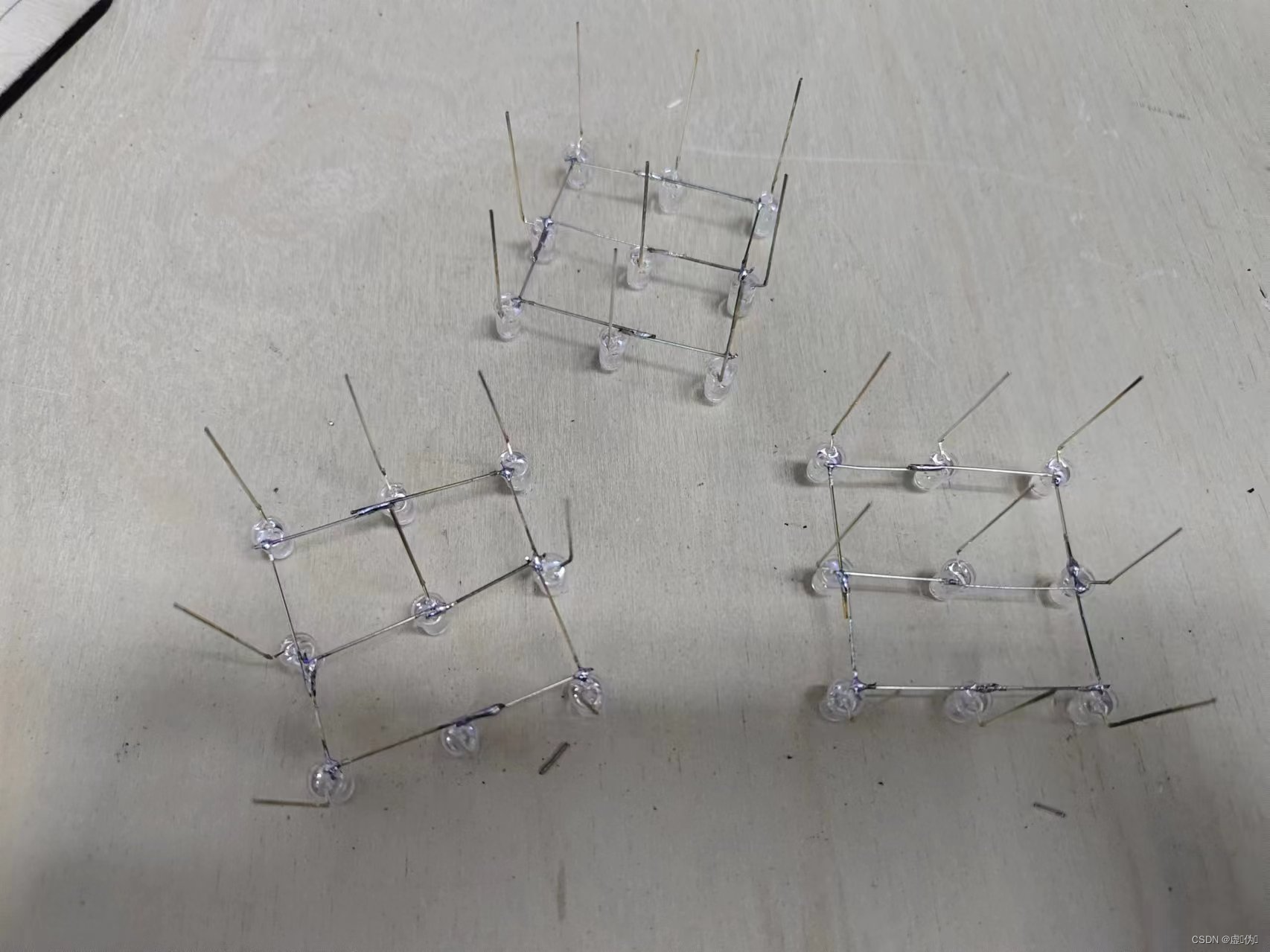
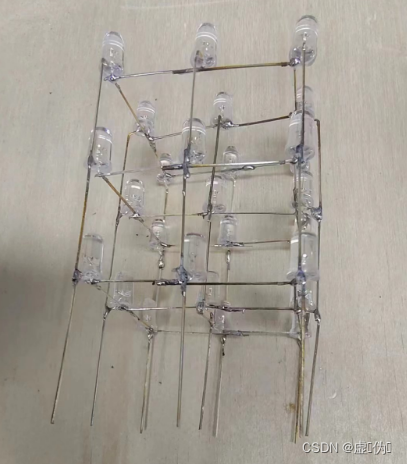
步骤11:焊接光立方
将制作好的三层LED焊接到一起
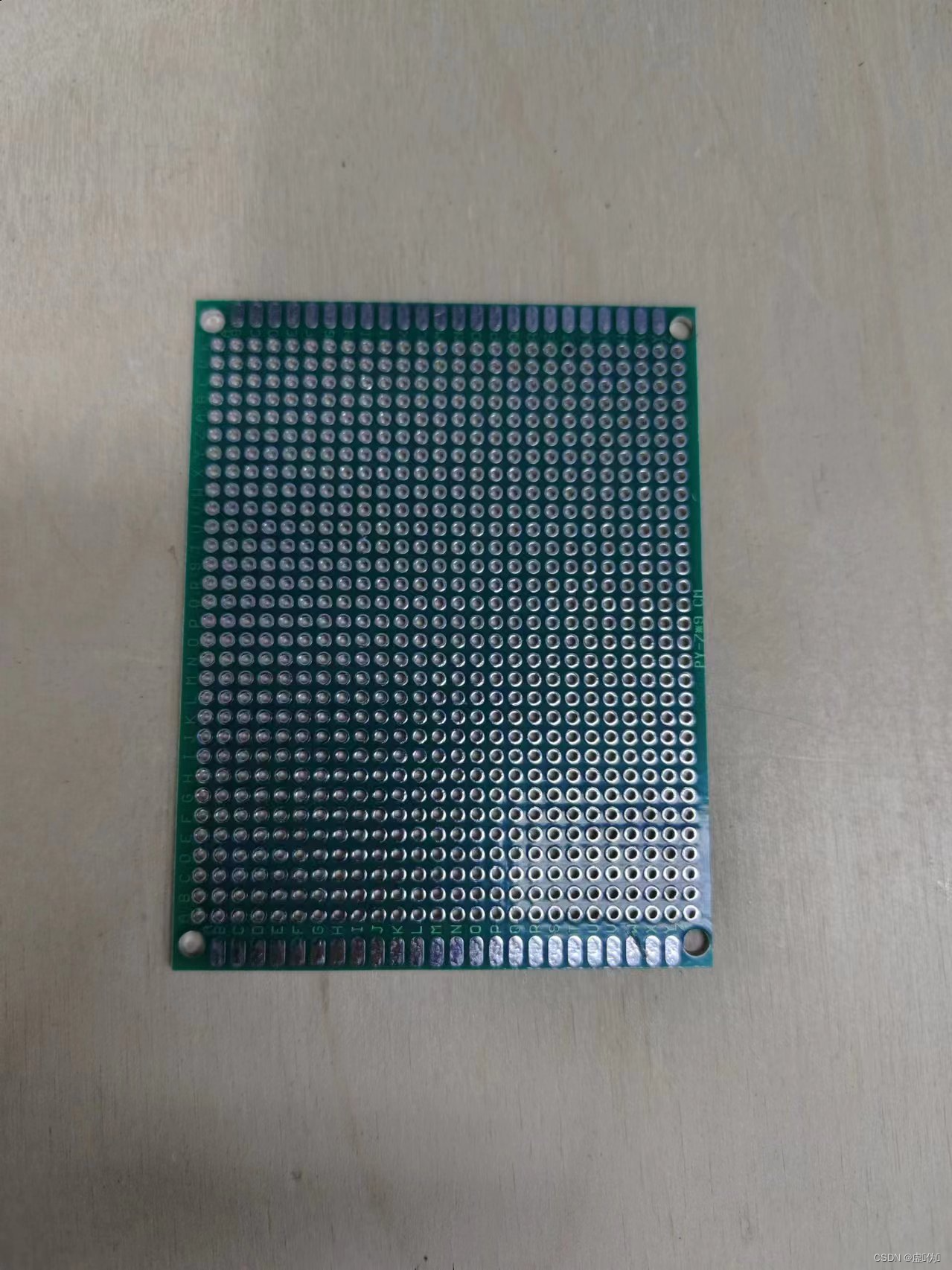
步骤12:底板
我这里使用了洞洞板来充当底板,你也可以选择其他的材料作为底板
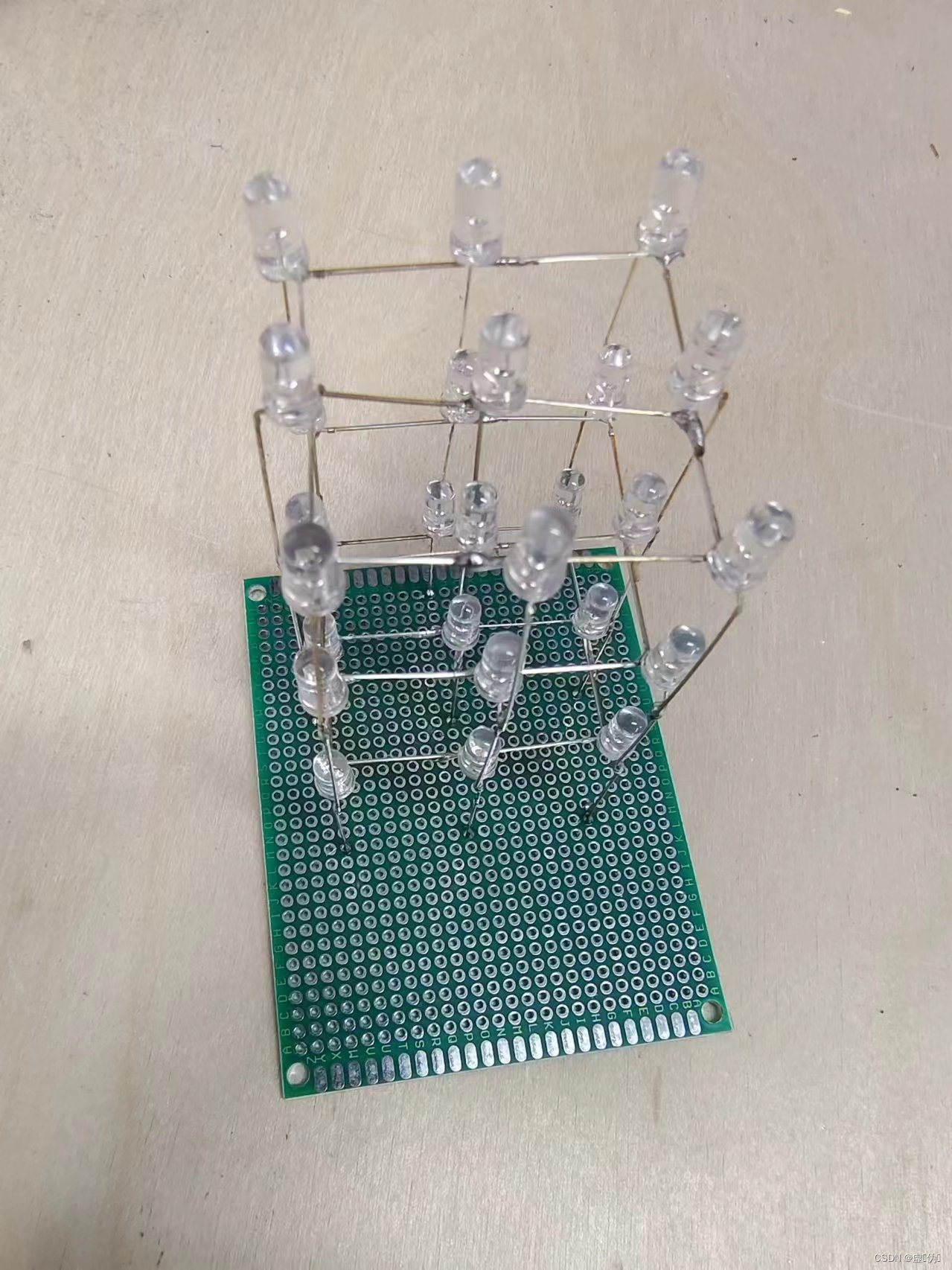
步骤13:固定光立方
将光立方固定至洞洞板的一侧,预留出空间放置arduino,将其焊接好即可
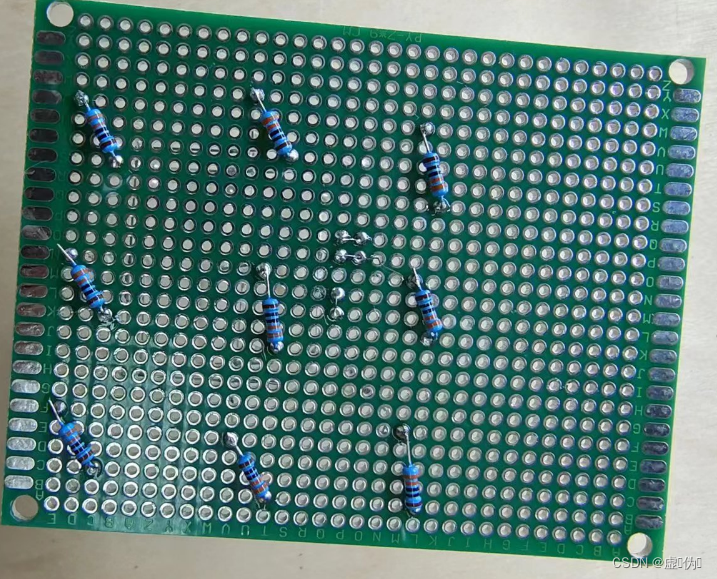
步骤14:准备电阻
之前材料清单讲过,准备9个100-330Ω的电阻
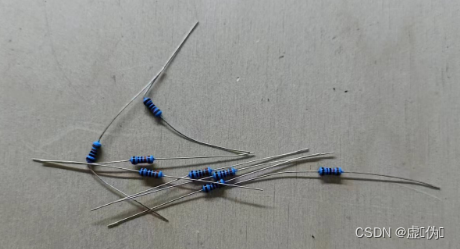
(这一步可以不做:电阻一只引脚折弯,一直引脚裁剪至3mm长度)

依次使电阻一端连接光立方固定在底板(洞洞板)的9个引脚
步骤15:焊接Arduino排母
准备好1 X 15的排母,焊接到洞洞板上。
步骤16:小插曲

步骤17:准备线若干
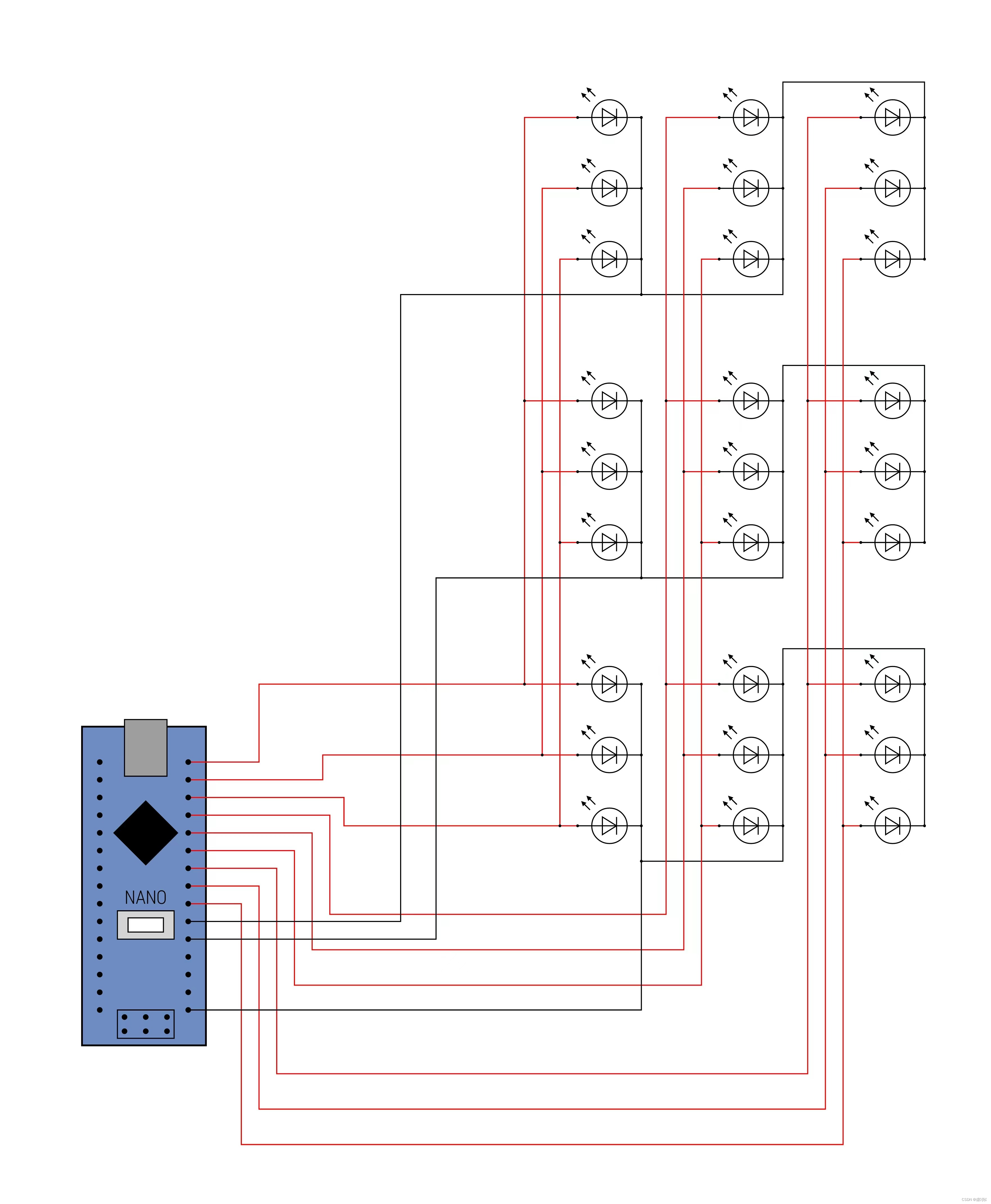
步骤18:接线图
图中黑色的线(LED灯珠的正极)共有三根,即对应三层的正极
红色的线即连接了三层的9个引脚
步骤19:上传程序
拿出你的arduino单片机,将文件打开,烧录程序至单片机中即可
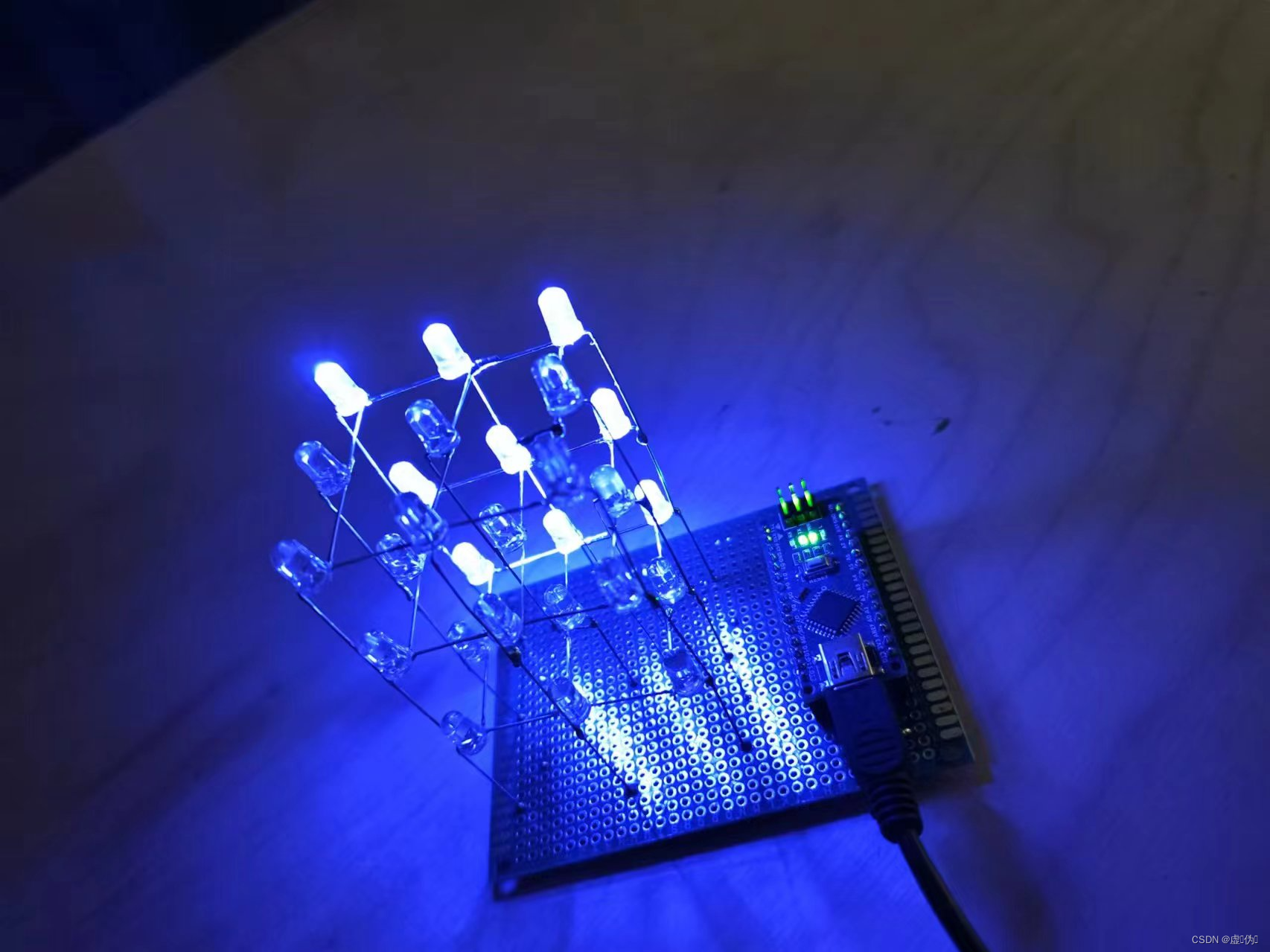
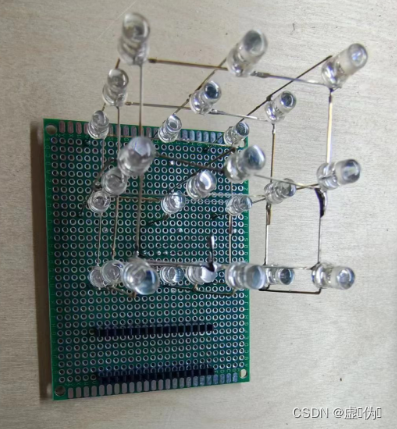
步骤20:光立方
为避免出丑,我就不放我那焊接的像盘丝洞一样的线了,直接看成品吧
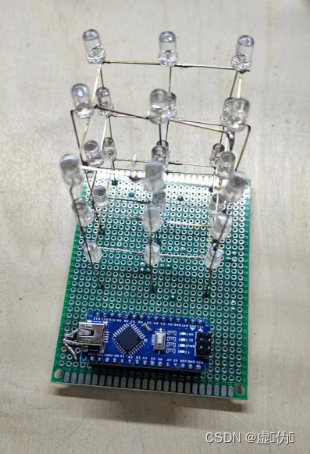
步骤21:灯光预览
这是在黑暗环境中的效果

程序
#define apin 12
#define bpin 11
#define cpin 10
#define dpin 9
#define epin 8
#define fpin 7
#define gpin 6
#define hpin 5
#define ipin 4
#define jpin 3
#define kpin 2
#define lpin 1
void setup() {
pinMode(apin, OUTPUT);
pinMode(bpin, OUTPUT);
pinMode(cpin, OUTPUT);
pinMode(dpin, OUTPUT);
pinMode(epin, OUTPUT);
pinMode(fpin, OUTPUT);
pinMode(gpin, OUTPUT);
pinMode(hpin, OUTPUT);
pinMode(ipin, OUTPUT);
pinMode(jpin, OUTPUT);
pinMode(kpin, OUTPUT);
pinMode(kpin, OUTPUT);
}
void loop() {
//1
analogWrite (apin, 0);
analogWrite (bpin, 0);
analogWrite (cpin, 0);
analogWrite (dpin, 0);
analogWrite (epin, 0);
analogWrite (fpin, 0);
analogWrite (gpin, 0);
analogWrite (hpin, 0);
analogWrite (ipin, 0);
analogWrite (jpin, 0);
analogWrite (kpin, 0);
analogWrite (lpin, 0);
delay (250);
//2
analogWrite (apin, 255);
analogWrite (bpin, 0);
analogWrite (cpin, 0);
analogWrite (dpin, 255);
analogWrite (epin, 0);
analogWrite (fpin, 0);
analogWrite (gpin, 255);
analogWrite (hpin, 0);
analogWrite (ipin, 0);
analogWrite (jpin, 0);
analogWrite (kpin, 0);
analogWrite (lpin, 0);
delay (160);
//3
analogWrite (apin, 0);
analogWrite (bpin, 255);
analogWrite (cpin, 0);
analogWrite (dpin, 0);
analogWrite (epin, 255);
analogWrite (fpin, 0);
analogWrite (gpin, 0);
analogWrite (hpin, 255);
analogWrite (ipin, 0);
analogWrite (jpin, 0);
analogWrite (kpin, 0);
analogWrite (lpin, 0);
delay (160);
//4
analogWrite (apin, 0);
analogWrite (bpin, 0);
analogWrite (cpin, 255);
analogWrite (dpin, 0);
analogWrite (epin, 0);
analogWrite (fpin, 255);
analogWrite (gpin, 0);
analogWrite (hpin, 0);
analogWrite (ipin, 255);
analogWrite (jpin, 0);
analogWrite (kpin, 0);
analogWrite (lpin, 0);
delay (600);
//5
analogWrite (apin, 0);
analogWrite (bpin, 255);
analogWrite (cpin, 0);
analogWrite (dpin, 0);
analogWrite (epin, 255);
analogWrite (fpin, 0);
analogWrite (gpin, 0);
analogWrite (hpin, 255);
analogWrite (ipin, 0);
analogWrite (jpin, 0);
analogWrite (kpin, 0);
analogWrite (lpin, 0);
delay (160);
//6
analogWrite (apin, 255);
analogWrite (bpin, 0);
analogWrite (cpin, 0);
analogWrite (dpin, 255);
analogWrite (epin, 0);
analogWrite (fpin, 0);
analogWrite (gpin, 255);
analogWrite (hpin, 0);
analogWrite (ipin, 0);
analogWrite (jpin, 0);
analogWrite (kpin, 0);
analogWrite (lpin, 0);
delay (160);
//7
analogWrite (apin, 0);
analogWrite (bpin, 0);
analogWrite (cpin, 0);
analogWrite (dpin, 0);
analogWrite (epin, 0);
analogWrite (fpin, 0);
analogWrite (gpin, 0);
analogWrite (hpin, 0);
analogWrite (ipin, 0);
analogWrite (jpin, 0);
analogWrite (kpin, 0);
analogWrite (lpin, 0);
delay (250);
//8
analogWrite (apin, 0);
analogWrite (bpin, 0);
analogWrite (cpin, 0);
analogWrite (dpin, 0);
analogWrite (epin, 0);
analogWrite (fpin, 0);
analogWrite (gpin, 255);
analogWrite (hpin, 255);
analogWrite (ipin, 255);
analogWrite (jpin, 0);
analogWrite (kpin, 0);
analogWrite (lpin, 0);
delay (160);
//9
analogWrite (apin, 0);
analogWrite (bpin, 0);
analogWrite (cpin, 0);
analogWrite (dpin, 255);
analogWrite (epin, 255);
analogWrite (fpin, 255);
analogWrite (gpin, 0);
analogWrite (hpin, 0);
analogWrite (ipin, 0);
analogWrite (jpin, 0);
analogWrite (kpin, 0);
analogWrite (lpin, 0);
delay (160);
//10
analogWrite (apin, 255);
analogWrite (bpin, 255);
analogWrite (cpin, 255);
analogWrite (dpin, 0);
analogWrite (epin, 0);
analogWrite (fpin, 0);
analogWrite (gpin, 0);
analogWrite (hpin, 0);
analogWrite (ipin, 0);
analogWrite (jpin, 0);
analogWrite (kpin, 0);
analogWrite (lpin, 0);
delay (600);
//11
analogWrite (apin, 0);
analogWrite (bpin, 0);
analogWrite (cpin, 0);
analogWrite (dpin, 255);
analogWrite (epin, 255);
analogWrite (fpin, 255);
analogWrite (gpin, 0);
analogWrite (hpin, 0);
analogWrite (ipin, 0);
analogWrite (jpin, 0);
analogWrite (kpin, 0);
analogWrite (lpin, 0);
delay (160);
//12
analogWrite (apin, 0);
analogWrite (bpin, 0);
analogWrite (cpin, 0);
analogWrite (dpin, 0);
analogWrite (epin, 0);
analogWrite (fpin, 0);
analogWrite (gpin, 255);
analogWrite (hpin, 255);
analogWrite (ipin, 255);
analogWrite (jpin, 0);
analogWrite (kpin, 0);
analogWrite (lpin, 0);
delay (160);
//13
analogWrite (apin, 0);
analogWrite (bpin, 0);
analogWrite (cpin, 0);
analogWrite (dpin, 0);
analogWrite (epin, 0);
analogWrite (fpin, 0);
analogWrite (gpin, 0);
analogWrite (hpin, 0);
analogWrite (ipin, 0);
analogWrite (jpin, 0);
analogWrite (kpin, 0);
analogWrite (lpin, 0);
delay (250);
//14
analogWrite (apin, 255);
analogWrite (bpin, 255);
analogWrite (cpin, 255);
analogWrite (dpin, 255);
analogWrite (epin, 255);
analogWrite (fpin, 255);
analogWrite (gpin, 255);
analogWrite (hpin, 255);
analogWrite (ipin, 255);
analogWrite (jpin, 255);
analogWrite (kpin, 255);
analogWrite (lpin, 0);
delay (160);
//15
analogWrite (apin, 255);
analogWrite (bpin, 255);
analogWrite (cpin, 255);
analogWrite (dpin, 255);
analogWrite (epin, 255);
analogWrite (fpin, 255);
analogWrite (gpin, 255);
analogWrite (hpin, 255);
analogWrite (ipin, 255);
analogWrite (jpin, 255);
analogWrite (kpin, 0);
analogWrite (lpin, 255);
delay (160);
//16
analogWrite (apin, 255);
analogWrite (bpin, 255);
analogWrite (cpin, 255);
analogWrite (dpin, 255);
analogWrite (epin, 255);
analogWrite (fpin, 255);
analogWrite (gpin, 255);
analogWrite (hpin, 255);
analogWrite (ipin, 255);
analogWrite (jpin, 0);
analogWrite (kpin, 255);
analogWrite (lpin, 255);
delay (600);
//17
analogWrite (apin, 255);
analogWrite (bpin, 255);
analogWrite (cpin, 255);
analogWrite (dpin, 255);
analogWrite (epin, 255);
analogWrite (fpin, 255);
analogWrite (gpin, 255);
analogWrite (hpin, 255);
analogWrite (ipin, 255);
analogWrite (jpin, 255);
analogWrite (kpin, 0);
analogWrite (lpin, 255);
delay (160);
//18
analogWrite (apin, 255);
analogWrite (bpin, 255);
analogWrite (cpin, 255);
analogWrite (dpin, 255);
analogWrite (epin, 255);
analogWrite (fpin, 255);
analogWrite (gpin, 255);
analogWrite (hpin, 255);
analogWrite (ipin, 255);
analogWrite (jpin, 255);
analogWrite (kpin, 255);
analogWrite (lpin, 0);
delay (160);
}作者:Huski( 虚҉伪҉ )
转载请注明出处















 4529
4529











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









