






波前传感技术依据不同的分类方式可以分为:瞳面/焦面探测(探测位置)、区域重构/模式波前检测(重构方式)、线性/非线性波前探测(重构过程)。
夏克-哈特曼光学波前探测是一种典型的瞳面波前探测技术。瞳面波前探测是指旨在影响能量份额的光瞳面上进行波前探测。
夏克-哈特曼光学波前传感器(Shack-Hartmann Wavefront Sensor,SH-WFS) 是一种用于测量光波波前畸变的设备,基于波前的局部倾斜特性来计算整体波前的形状。它是自适应光学系统中的关键部件,因其简单、精确且实时性能好,广泛应用于天文学、激光物理和显微成像等领域。
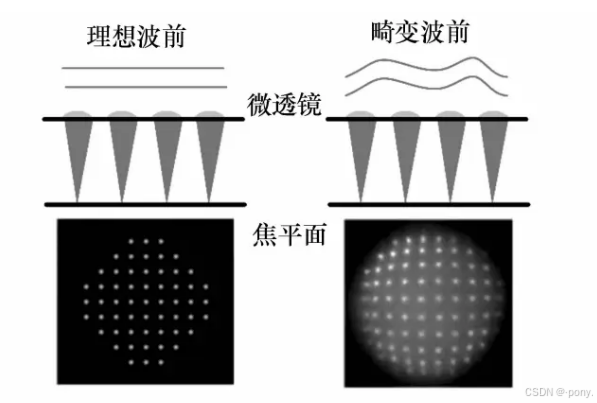
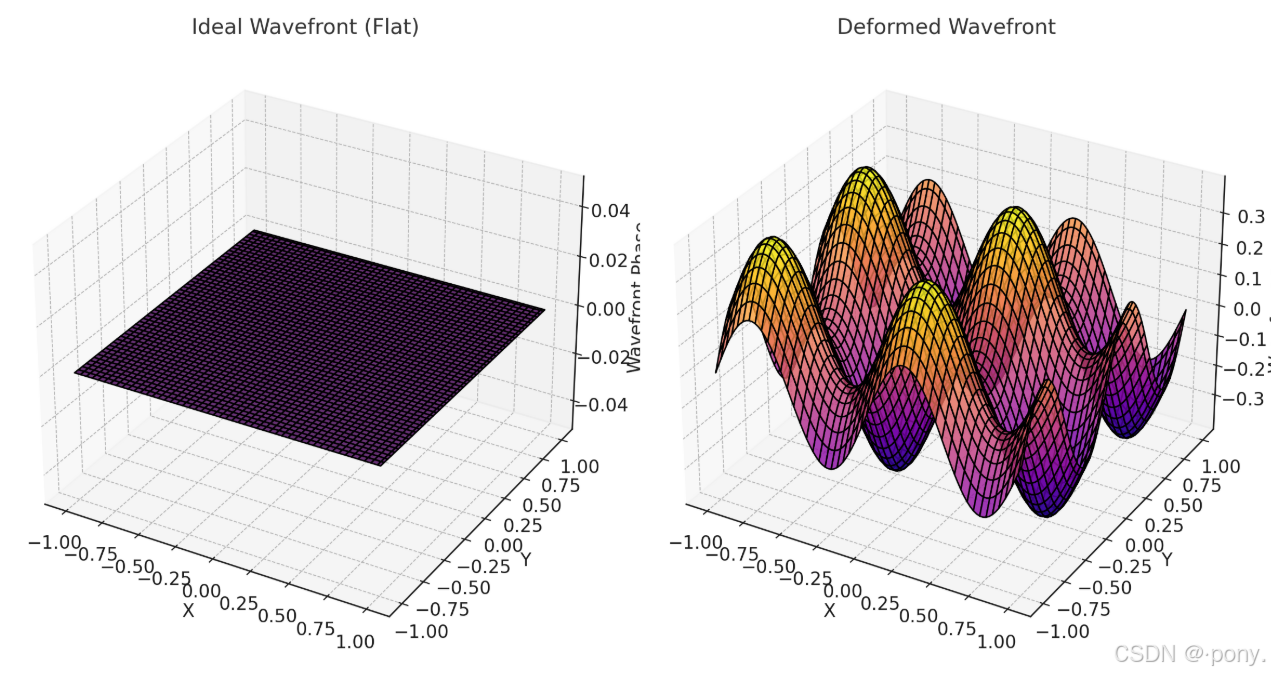
图1 畸变导致的波前变化
其基本原理如图所示:待测光束子光斑的质心位置偏移量来计算局部波前斜率。
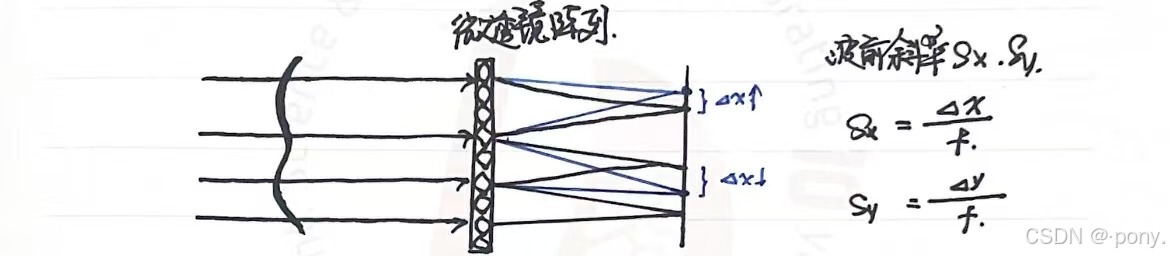
图2 夏克-哈特曼光学波前传感原理
夏克-哈特曼传感器的核心是一个透镜阵列,将进入的光波前分割成多个子光束。每个透镜的焦点位置会受到波前局部倾斜的影响。如图所示理想情况下所有光束的焦点应位于透镜阵列后焦平面的规则网格上。
蓝点表示理想光点(平坦波前下的焦点),红点表示畸变波前导致的焦点偏移;黑色虚线展示了光点从理想位置到偏移位置的轨迹,表明波前局部倾斜导致的偏移。
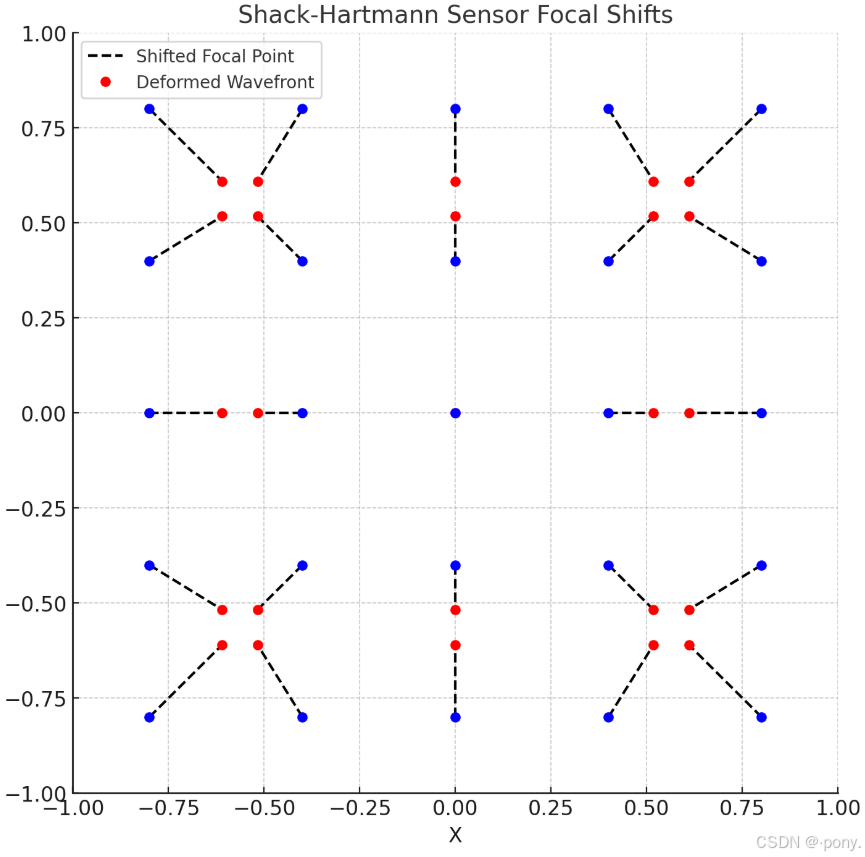
图3 夏克-哈特曼光学焦点偏移
1、波前探测
每个子孔径(微透镜)产生一个光斑,光斑的偏移量与该区域内波前的倾斜角度(斜率)相关。求子孔径光斑质心坐标,通过对光斑内光强分布的加权平均来进行。
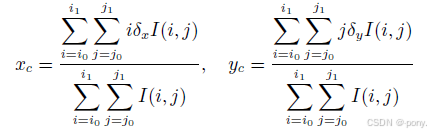
其中, 像素点是像素点(i,j)处的光强,
是像素间隔距离。
每个子区域的波前斜率由夏克-哈特曼传感器通过光斑质心的偏移量测量得到:
![]()
2、波前复原原理
目前由子孔径光斑阵列恢复波前的方法主要有两种:一、区域波前复原发;二、模式波前复原法
【区域波前复原法】:通过测量子孔径周围点质心位置,由估计算法得出中心点的相位值。有三种主要的重构方式(即不同估算重构的方式),包括:Hudgin模型、Fried模型、Southwell模型。
详细内容参考博文区域法(zonal method)重构波前_模式法波前重构-CSDN博客
这三种模型的差分方程均可以用矩阵形式表达:
【模式波前复原法】:计算出全孔径的波前相位所对应的各阶正交模式,然后用测量的各子孔径点斑斜率数据进行各模式系数拟合,求出完整的展开式,得到波前相位。
3、性能指标
(1)动态范围
动态范围与微透镜子孔径直径D、微透镜焦距f有关。当局部波前倾斜量大到使子孔径内的光斑质心落到其对应的靶面范围之外时,即为传感器的极限动态范围。质心算法被设置为仅在相应的子孔径内工作。
整个孔径内的最大可测量波前倾斜为
N为光瞳直径上子孔径的数目。
(2)灵敏度
假设探测器的像元尺寸为P,光斑质心的测量精度为q个像素,最小可分辨距离:
故光斑的质心探测精度越高、焦距越长,传感器的灵敏度会更高。
(3)探测精度
探测器的探测精度即波前复原的精度。此精度有两个层面的衡量,分别是微精度、宏精度。
微精度是质心算法计算的光点与实际位置之间的偏差;宏精度指的是由波前有限微透镜阵列的取样过程决定。子孔径越多,所能够拟合的zernike多项式的阶数越多,则波面的复原精度就越高,但在相同子孔径数时,拟合多项式的阶数过多,会使模式耦合误差和测量噪声增加,反而降低精度,同时每个子孔径内的能量降低,对探测能力存在一定影响。
(4)探测速度
探测速度与相机曝光时间有关,与计算量有关。
像素数越多、子孔径数越多,计算量越大,因此要在探测速度和测量精度之间折中选择。

















 784
784

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









