






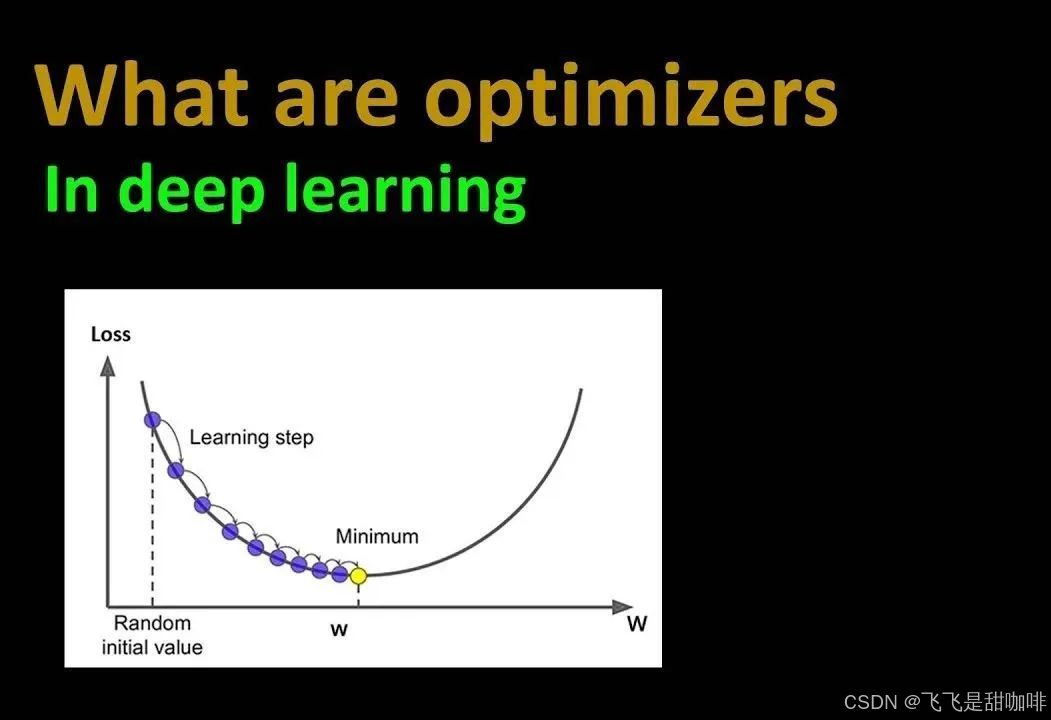
什么是优化器?
在深度学习中,优化器(Optimizer)是一个核心概念,它负责调整神经网络的权重和偏置,以便最小化损失函数,从而提高模型的准确性和性能。
常见的优化器,包括梯度下降系列(批量梯度下降BGD、随机梯度下降SGD、小批量梯度下降MBGD)、动量法、NAG、Adagrad、RMSprop以及Adam等,它们的核心目标是通过调整学习率、利用梯度信息等手段,高效地最小化损失函数,从而优化和提升神经网络模型的性能。
为什么需要优化器?
由于目标函数拥有众多参数且结构复杂,直接寻找最优参数变得十分困难。因此,我们需要借助优化器,它能够逐步调整参数,确保每次优化都朝着最快降低损失的方向前进。
优化器调参
即根据模型实际情况,调整学习率、动量因子、权重衰减等超参数,以优化训练效果和性能。需通过经验和实验找最佳组合,实现快速收敛、减少摆动、防止过拟合。
- 学习率:过大的学习率可能导致模型无法收敛,而过小的学习率则会使训练过程变得缓慢。因此,需要根据实际情况选择合适的学习率。
- 动量因子:对于使用动量的优化器,动量因子的选择也很重要。动量因子决定了过去梯度对当前梯度的影响程度。合适的动量因子可以加速收敛,减少摆动。
- 权重衰减:权重衰减是一种正则化方法,用于防止模型过拟合。在优化器中,可以通过添加权重衰减项来减少模型的复杂度。
优化器使用
每个优化器都是一个类,一定要进行实例化才能使用,比如以下这段代码描述了随机梯度下降(SGD)优化器(带有动量)的一个 Python 类。
class SGD(optimizer_v2.OptimizerV2):
_HAS_AGGREGATE_GRAD = True
def __init__(self,
learning_rate=0.01,
momentum=0.0,
nesterov=False,
name="SGD",
**kwargs):
super(SGD, self).__init__(name, **kwargs)
self._set_hyper("learning_rate", kwargs.get("lr", learning_rate))
self._set_hyper("decay", self._initial_decay)
self._momentum = False
if isinstance(momentum, ops.Tensor) or callable(momentum) or momentum > 0:
self._momentum = True
if isinstance(momentum, (int, float)) and (momentum < 0 or momentum > 1):
raise ValueError("`momentum` must be between [0, 1].")
self._set_hyper("momentum", momentum)
self.nesterov = nesterov
def _create_slots(self, var_list):
if self._momentum:
for var in var_list:
self.add_slot(var, "momentum")
def _prepare_local(self, var_device, var_dtype, apply_state):
super(SGD, self)._prepare_local(var_device, var_dtype, apply_state)
apply_state[(var_device, var_dtype)]["momentum"] = array_ops.identity(
self._get_hyper("momentum", var_dtype))
def _resource_apply_dense(self, grad, var, apply_state=None):
var_device, var_dtype = var.device, var.dtype.base_dtype
coefficients = ((apply_state or {}).get((var_device, var_dtype))
or self._fallback_apply_state(var_device, var_dtype))
if self._momentum:
momentum_var = self.get_slot(var, "momentum")
return gen_training_ops.ResourceApplyKerasMomentum(
var=var.handle,
accum=momentum_var.handle,
lr=coefficients["lr_t"],
grad=grad,
momentum=coefficients["momentum"],
use_locking=self._use_locking,
use_nesterov=self.nesterov)
else:
return gen_training_ops.ResourceApplyGradientDescent(
var=var.handle,
alpha=coefficients["lr_t"],
delta=grad,
use_locking=self._use_locking)
def _resource_apply_sparse_duplicate_indices(self, grad, var, indices,
**kwargs):
if self._momentum:
return super(SGD, self)._resource_apply_sparse_duplicate_indices(
grad, var, indices, **kwargs)
else:
var_device, var_dtype = var.device, var.dtype.base_dtype
coefficients = (kwargs.get("apply_state", {}).get((var_device, var_dtype))
or self._fallback_apply_state(var_device, var_dtype))
return gen_resource_variable_ops.ResourceScatterAdd(
resource=var.handle,
indices=indices,
updates=-grad * coefficients["lr_t"])
def _resource_apply_sparse(self, grad, var, indices, apply_state=None):
# This method is only needed for momentum optimization.
var_device, var_dtype = var.device, var.dtype.base_dtype
coefficients = ((apply_state or {}).get((var_device, var_dtype))
or self._fallback_apply_state(var_device, var_dtype))
momentum_var = self.get_slot(var, "momentum")
return gen_training_ops.ResourceSparseApplyKerasMomentum(
var=var.handle,
accum=momentum_var.handle,
lr=coefficients["lr_t"],
grad=grad,
indices=indices,
momentum=coefficients["momentum"],
use_locking=self._use_locking,
use_nesterov=self.nesterov)
def get_config(self):
config = super(SGD, self).get_config()
config.update({
"learning_rate": self._serialize_hyperparameter("learning_rate"),
"decay": self._serialize_hyperparameter("decay"),
"momentum": self._serialize_hyperparameter("momentum"),
"nesterov": self.nesterov,
})
return config
当动量为0时,参数w的更新规则(梯度为g):
w = w - 学习率 * g
当动量大于0时的更新规则:
速度 = 动量 * 速度 - 学习率 * g
w = w + 速度
当`nesterov=True`时(即采用Nesterov动量),此规则变为:
速度 = 动量 * 速度 - 学习率 * g
w = w + 动量 * 速度 - 学习率 * g
参数:
- 学习率
- 动量:浮点超参数 >=0,加速梯度下降在相关方向并抑制振荡。
- nesterov:布尔值,是否应用Nesterov动量
- name:可选名称前缀,用于应用梯度时创建的操作。默认为`"SGD"。
- kwargs:关键字参数。允许是 `"clipnorm"或`"clipvalue"之一。 `"clipnorm"(浮点)按范数裁剪梯度;`"clipvalue"(浮点)按值裁剪梯度。
用法:
这段代码展示了如何使用 TensorFlow 中的 SGD(随机梯度下降)优化器进行基本的优化步骤。这里通过一个简单的二次函数 loss = (var ** 2) / 2.0 来演示优化过程,其中 var 是一个 TensorFlow 变量,初始值为 1.0。梯度下降的目标是通过调整 var 的值来最小化损失函数。
>>> opt = tf.keras.optimizers.SGD(learning_rate=0.1) # 创建一个 SGD 优化器实例,学习率设置为 0.1
>>> var = tf.Variable(1.0) # 定义一个 TensorFlow 变量 var,初始值为 1.0
>>> loss = lambda: (var ** 2)/2.0 # 损失函数的梯度(导数)为 d(loss)/d(var) = var
>>> step_count = opt.minimize(loss, [var]).numpy() # 步长是 :- 学习率 * 梯度
# 使用 SGD 优化器的 minimize 方法来执行一次优化步骤。
# 这一步计算损失函数关于 var 的梯度,并根据梯度和学习率更新 var 的值。
>>> var.numpy()
0.9
打印更新后的 var 值,期望看到 var 值减少,因为损失函数关于 var 是正相关的。
带动量的SGD:
>>> opt = tf.keras.optimizers.SGD(learning_rate=0.1, momentum=0.9) #带动量的 SGD 优化器实例
>>> var = tf.Variable(1.0)
>>> val0 = var.value()
>>> loss = lambda: (var ** 2)/2.0 # d(loss)/d(var1) = var1
>>> # First step is `- learning_rate * grad`
>>> step_count = opt.minimize(loss, [var]).numpy() #执行优化步骤
>>> val1 = var.value()
>>> (val0 - val1).numpy()
0.1
更新公式为: new_var=var−learning_rate×var,所以 new_var=1.0−0.1×1.0=0.9。比较带动量优化前后 var 的值,由于动量的影响,期望看到更新步长增加。1.0−0.9=0.1
后续步骤中步长的增加:
>>> # On later steps, step-size increases because of momentum
>>> step_count = opt.minimize(loss, [var]).numpy()
>>> val2 = var.value()
>>> (val1 - val2).numpy()
0.18
再次执行优化步骤,并比较连续两次更新的步长,由于动量的累积效应,步长应该进一步增加。
什么是Nesterov动量?
Nesterov动量由Yurii Nesterov在1983年提出,它是一种动量优化方法,通过结合前几步的梯度信息来调整当前的更新。Nesterov动量的主要思想是,利用历史梯度信息来预测当前梯度的方向,从而更有效地进行参数更新。
Nesterov动量的更新规则
在带动量的梯度下降中,如果momentum(动量)大于0,更新规则如下:
-
计算动量更新: velocity=momentum×velocity−learning_rate×g 其中,
velocity是动量,momentum是动量系数,learning_rate是学习率,g是当前梯度。 -
更新参数: w=w+velocity 其中,
w是模型参数。
当nesterov=True时,更新规则变为:
-
计算动量更新: velocity=momentum×velocity−learning_rate×g
-
更新参数: w=w+momentum×velocity−learning_rate×g 这种更新方式考虑了当前梯度和前一步动量,使得更新更加平滑,有助于避免陷入局部最小值。
优点
-
加速收敛:Nesterov动量可以帮助模型更快地收敛到最优解。
-
减少震荡:通过平滑更新,Nesterov动量可以减少优化过程中的震荡,提高优化的稳定性。
reference:
https://blog.csdn.net/2401_85390073/article/details/143932362
For `nesterov=True`, See [Sutskever et al., 2013](http://jmlr.org/proceedings/papers/v28/sutskever13.pdf).

















 316
316

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









