






【栅格计算器】
1、打开需要归一化处理的栅格图像
2、点击toolbox中的【Spatial Analyst】->【地图代数】->【栅格计算器】
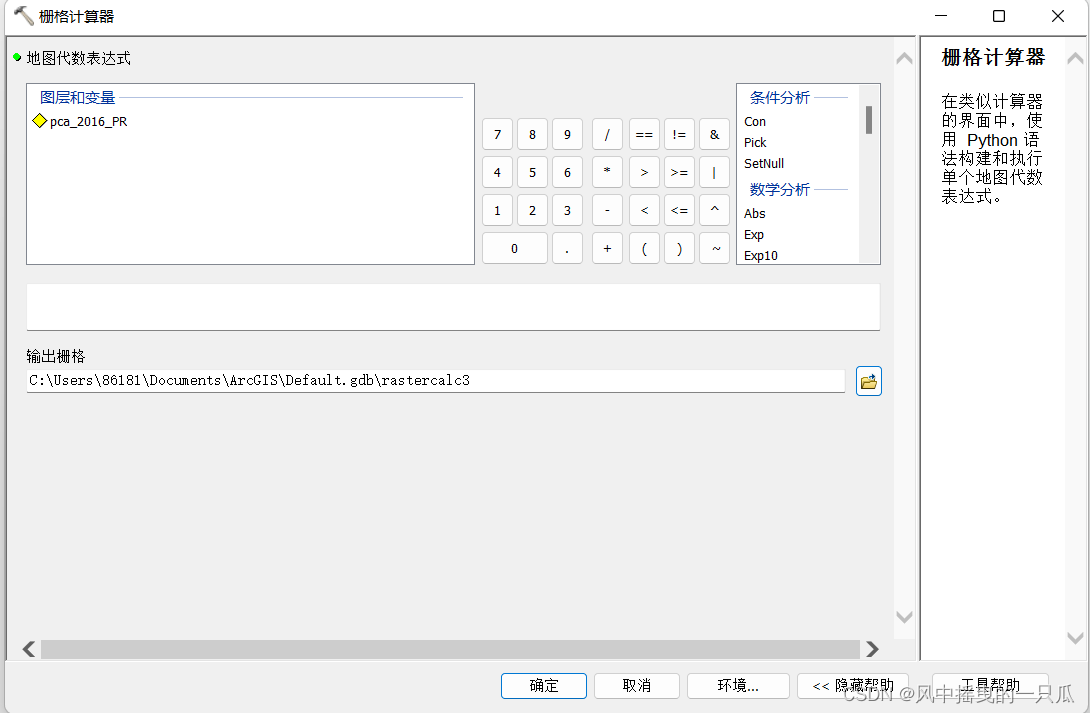
3、输入公式:float(("栅格影像"-灰度值最小值))/(灰度值最大值-灰度值最小值)
如:![]()
PS:这是最常用的归一化计算方法,但如果影像灰度值最大值最小值是无穷小数,可以考虑用第二种方法。
【模糊分类】
1、打开影像(同上)
2、点击toolbox中的【Spatial Analyst】->【叠加分析】->【模糊分类】

3、“输入栅格”:需要归一化的影像
“分类值类型”:“线性函数”
“最大值/最小值”:(自动提取)
“障碍”:“NONE”
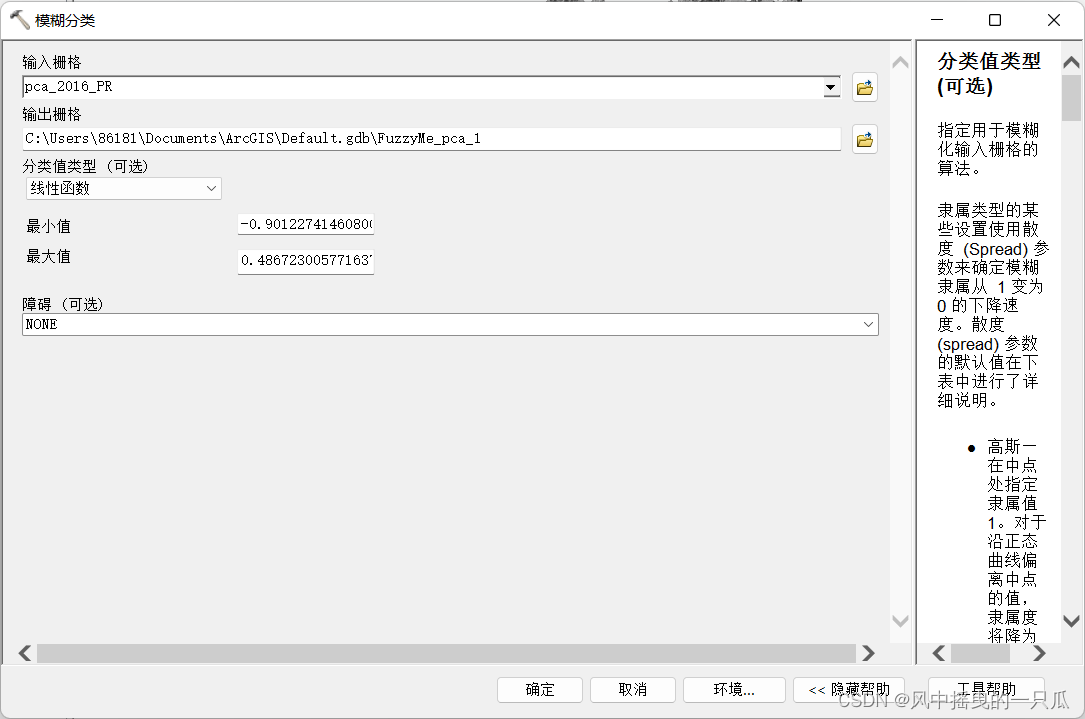
点击“确定”,得到归一化影像。

















 2220
2220

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









