






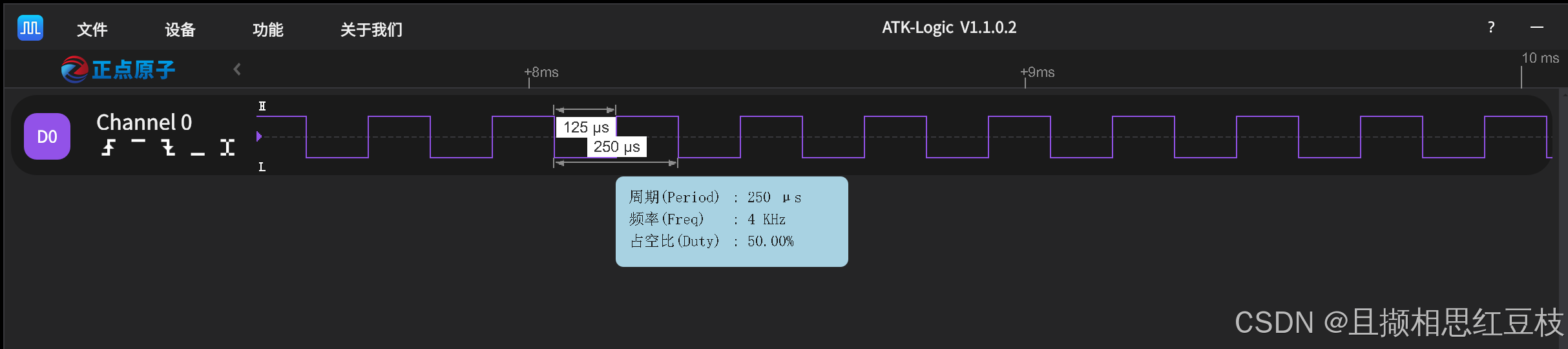
许多设备的控制都依赖于PWM波的精确调整,例如,电机速度控制、LED亮度调节、步进电机驱动等都离不开PWM波。ESP32官方为我们提供了便捷的PWM使用方法,那么我们就以输出50%占空比的PWM波为例来了解一下如何进行PWM的输出操作。
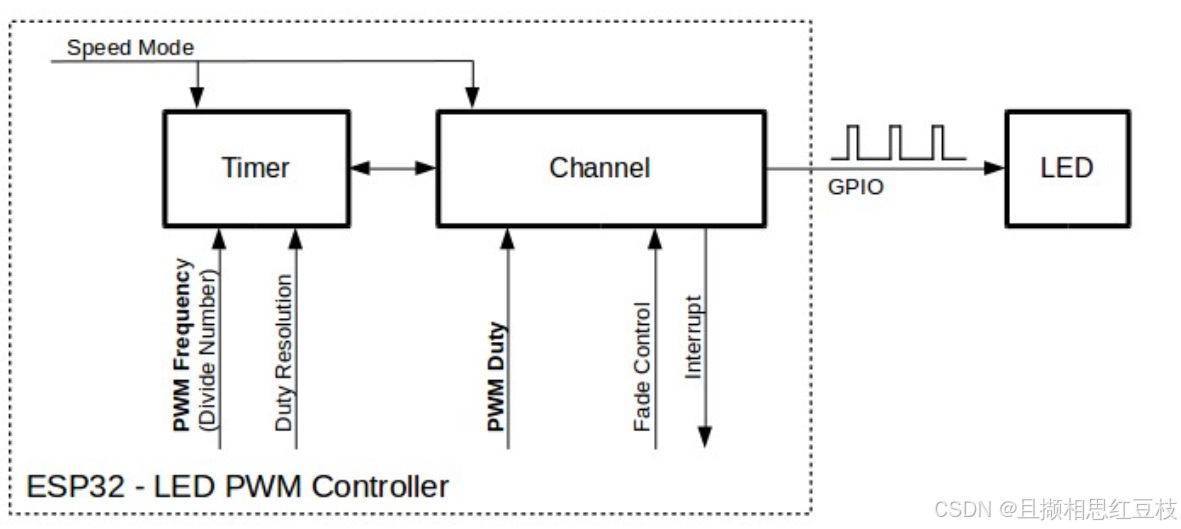
首先,老规矩我们还是来看一下官方的实现方案是什么如何进行操作。请看根据官方的文档,文档中写明了需要通过定时器配置,通道配置,改变PWM信号三个步骤来实现PWM波形的输出。
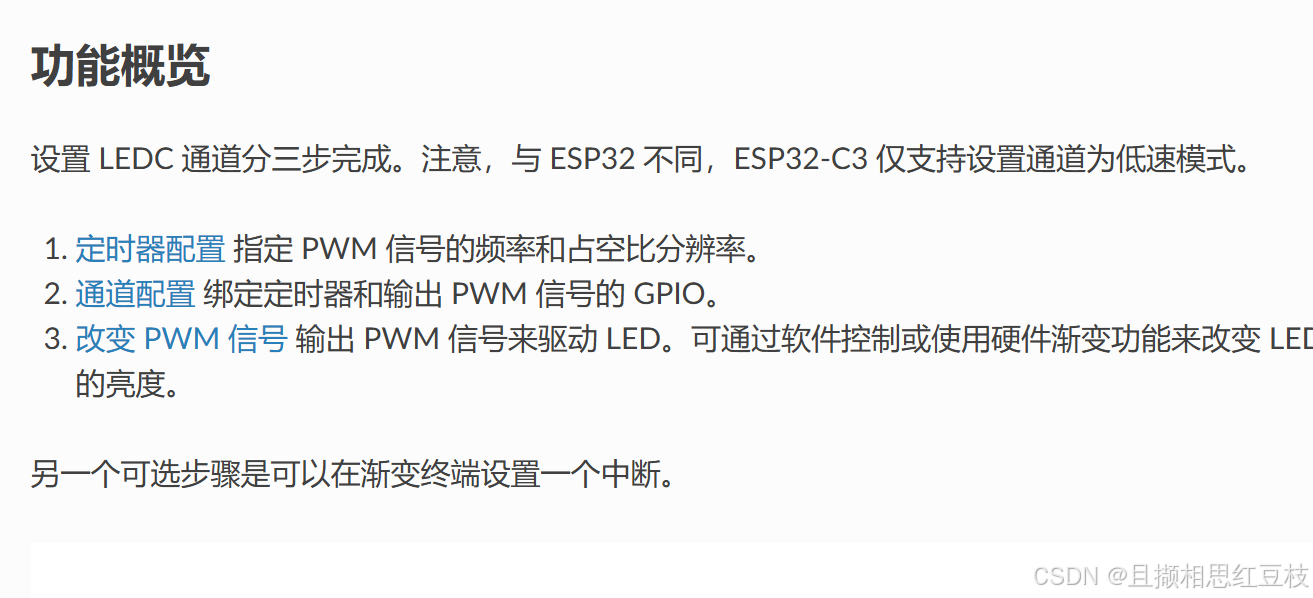
那么我们按照官方的文档首先进行的步骤就是定时器的配置:
配置定时器:
分辨率:13bit
频率:4000Hz
速度模式:低速
定时器:Timer_0
时钟:自动时钟
ledc_timer_config_t ledc_timer = {
.duty_resolution = LEDC_TIMER_13_BIT,
.freq_hz = 4000,
.speed_mode = LEDC_LOW_SPEED_MODE,
.timer_num = LEDC_TIMER_0,
.clk_cfg=LEDC_AUTO_CLK
};
ESP_ERROR_CHECK(ledc_timer_config(&ledc_timer));
第二步我们应该进行的是通道配置之:
通道:通道0
占空比:0(后面会设置目前先设置为0)
gpio_num(引脚号):整个值具体的自己传
速度模式:低速模式
始终选择:Time0
ledc_channel_config_t ledc_channel = {
.channel = LEDC_CHANNEL_0,
.duty = 0,
.gpio_num = gpio_num,
.speed_mode = LEDC_LOW_SPEED_MODE,
.hpoint = 0,
.timer_sel = LEDC_TIMER_0
};
ESP_ERROR_CHECK(ledc_channel_config(&ledc_channel));
第三步我们进行改变PWM信号的配置:
根据官方的文档呢我们应该进行的操作是首先设置占空比

我们应该首先设置占空比然后再更新占空比
ESP_ERROR_CHECK(ledc_set_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_0, rate));
ESP_ERROR_CHECK(ledc_update_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_0));
然后把这玩意统一一下完整一点的代码就是:
这里的最大占空比是通过官方的2的13次方得出的分辨率为13。

typedef enum{
MIN_PWM_RATE=0,
LOW_PWM_RATE=1024, //25%
MID_PWM_RATE=4096, //50%
HIGH_PWM_RATE=8192, //75%
MAX_PWM_RATE=8192 //MAX PWM_RATE = 2 ** 13 = 8192
}PWM_RATE_T;
void PwmDev_Init(int gpio_num,PWM_RATE_T rate)
{
ledc_timer_config_t ledc_timer = {
.duty_resolution = LEDC_TIMER_13_BIT,
.freq_hz = 4000,
.speed_mode = LEDC_LOW_SPEED_MODE,
.timer_num = LEDC_TIMER_0,
.clk_cfg=LEDC_AUTO_CLK
};
ESP_ERROR_CHECK(ledc_timer_config(&ledc_timer));
ledc_channel_config_t ledc_channel = {
.channel = LEDC_CHANNEL_0,
.duty = 0,
.gpio_num = gpio_num,
.speed_mode = LEDC_LOW_SPEED_MODE,
.hpoint = 0,
.timer_sel = LEDC_TIMER_0
};
ESP_ERROR_CHECK(ledc_channel_config(&ledc_channel));
ESP_ERROR_CHECK(ledc_set_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_0, rate));
ESP_ERROR_CHECK(ledc_update_duty(LEDC_LOW_SPEED_MODE, LEDC_CHANNEL_0));
}
extern "C" void app_main(void)
{
PwmDev_Init();
while(1)
{
}
}
ok,最后的实现效果如下

















 5594
5594

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









