







1.ESP8266开发板资源
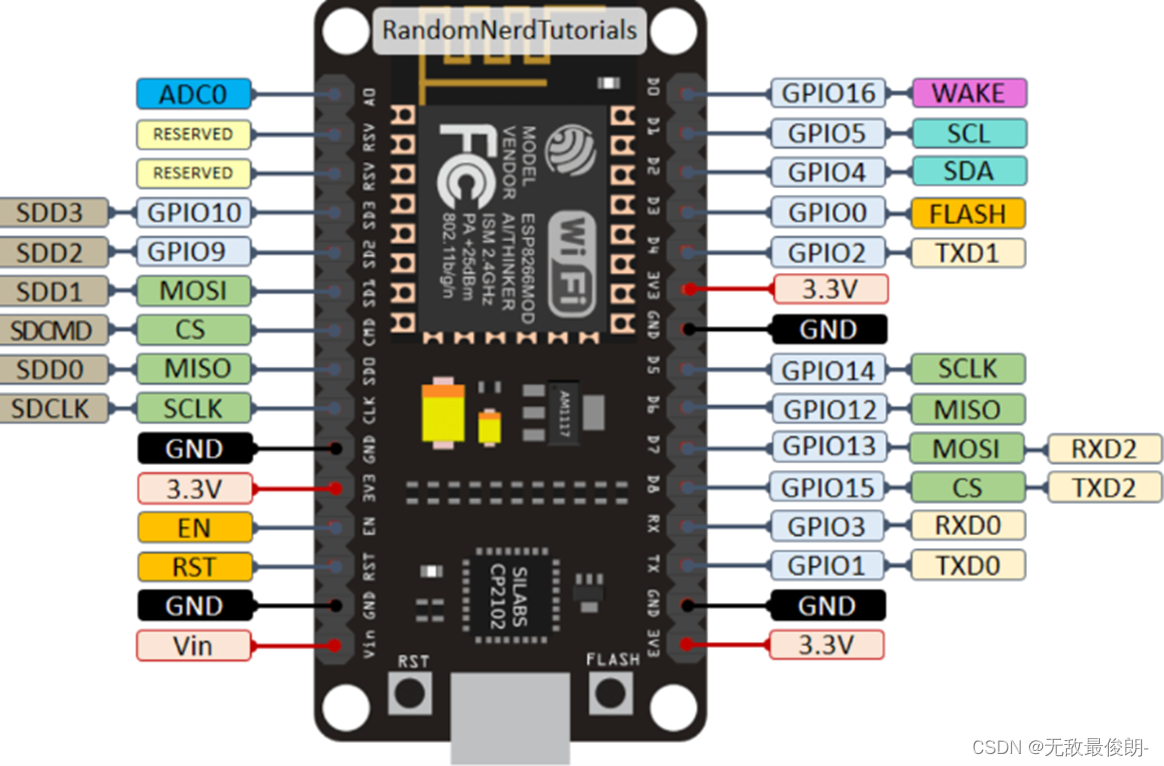
一个AD口,一个IIC口,一个默认UART串口,可用IO口大概13个。 对应的引脚图看自己的板子,大差不差,充分利用资源的话大概可以连接3—7个传感器进行读取,根据自己的传感器输出数据类型进行选择就行。
2.Arduino编程
1.准备工作
这里就不说了,下载ESP8266库等,很简单解决。
2.读取多个串口数据
1.定义软串口
我这里完成的是两个485输出的风速风向传感器数据以及两个UART输出的颗粒物和CO数据的采集,因为ESP8266不可以直接读取485的数据,所以我这里采用485转换模块(几块钱)将485转为UART后再用板子采集,这就需要四个UART口来采集数据,而ESP8266默认的UART口只有一个,所以我们就需要用到空闲的IO口,通过软件可以将IO口定义为UART口,每个UART口都需要定义一个TX,一个RX,称为定义软串口,代码实现也比较简单:
#include <SoftwareSerial.h>
SoftwareSerial uart1(13,15);//RX=d7,TX=d8,用于颗粒物传感器
SoftwareSerial uart2(14,12);//RX=d5,TX=d6,用于CO传感器
SoftwareSerial uart2(0,2);//RX=d3,TX=d4 ,用于风向传感器
SoftwareSerial uart2(10,9);//RX=sd3,TX=sd2 不能定义软串口
SoftwareSerial uart2(5,4);//RX=d1,TX=d2 ,用于风速传感器
SoftwareSerial uart2(14,15);//RX=d5,TX=d2
包含<SoftwareSerial.h>头文件,直接调用就行,上面差不多列出了几乎所有的可定义串口的IO口,GPIO10和9这两个就别用了,好像被占用了,当然,如果你只需要接收传感器的数据而不需要向传感器发送指令的话,也就是说你只需要RX,不需要TX,在定义时也可以多个串口定义同一个TX,这样可以定义更多的UART口,连接更多的传感器。
2.涉及传感器简介
传感器数据大都会有两种模式,主动上传和被动问答,主动上传就是传感器有规律的每隔一段时间自动上传采集数据,大多为1S,被动问答就是先向传感器发送问询指令,当传感器收到后即上传采集的数据。
如果是做节点等建议采用被动问答的模式,主动上传会出现一些问题,我出现的问题就是每次采集一次数据,串口打印的数据都有3行一模一样的数据,这个有两个解决方法,一就是加上校验,二就是采用问询模式,这两种方法都可以解决,不过加校验稍微有点麻烦,所以我采用了问询的模式,这里实现全部采用问询的模式。
3.集成代码(注释详细)
#include "SoftwareSerial.h"
SoftwareSerial uart1(13,15);//RX=d7,TX=d8,用于颗粒物传感器
SoftwareSerial uart2(14,12);//RX=d5,TX=6,用于CO传感器
SoftwareSerial uart3(0,2);//RX=d3,TX=d4,用于风向传感器
SoftwareSerial uart4(5,4);//RX=d1,TX=d2,用于风速传感器
//传感器问询指令根据你所使用的传感器说明书上获得,定义一个数组放入问询指令,等待发送
unsigned char item[9] = {0xFF, 0x01, 0x86, 0x00, 0x00, 0x00, 0x00,0X00, 0x79}; //16进制颗粒物问询命令,CO也一样,共用
unsigned char item1[8] = {0x01, 0x03, 0x00, 0x00, 0x00, 0x02,0xC4, 0x0B}; //16进制风向传感器问询命令,风速一样
//读取四个传感器函数,采用问询模式
void ProcessSerialData()//定义数据采集函数
{
int arr[6];//定义这个数组最后用,存放需要串口打印的数据,可以根据自己的数据接收类型进行设置,没必要是int型
//传感器的返回数据长度即位置信息也由对应说明书获得,这里巧了全是返回9位数据
uint8_t mPkt[9] = {0};//定义颗粒物数组返回字节接收数组
uint8_t coPkt[9] = {0};//定义CO数组返回字节接收数组
uint8_t dPkt[9] = {0};//定义风向数组返回字节接收数组
uint8_t sPkt[9] = {0};//定义风速数组返回字节接收数组
for (int i = 0 ; i < 9; i++) // 发送问询命令
{
uart1.write(item[i]); // write输出,写入颗粒物传感器问询指令
uart2.write(item[i]); // write输出,写入CO传感器问询指令
}
for (int m = 0 ; m < 8; m++) // 发送问询命令
{
uart3.write(item1[m]); // write输出,写入风向传感器问询指令
uart4.write(item1[m]); // write输出,写入风速传感器问询指令
}
delay(100); // 等待数据返回,这个也最好加上
while (uart1.available()) //判断对于串口是否返回了数据
{
for(int j=0;j<9;j++){
mPkt[j]=uart1.read(); // read按字节读取,存入数组
}
if(uart2.available()>0){
for(int k=0;k<9;k++){
coPkt[k]=uart2.read(); // read按字节读取,存入数组
}
}
if(uart3.available()>0){
for(int n=0;n<9;n++){
dPkt[n]=uart3.read(); // read按字节读取,存入数组
}
}
if(uart4.available()>0){
for(int a=0;a<9;a++){
sPkt[a]=uart4.read(); // read按字节读取,存入数组
}
}
}
//这里数据就采集完放入接收数组了,可以根据传感器返回数据的位置信息进行自由串口打印,
//一般还需要进行16进制转十进制转换,按照下面格式就行
arr[0]=mPkt[6]*256+mPkt[7];//PM1.0,这里代表的就是返回的第7、8位数据表示PM1.0的浓度
arr[1]=mPkt[2]*256+mPkt[3];//PM2.5,这里代表的就是返回的第3、4位数据表示PM2.5的浓度
arr[2]= mPkt[4]*256+mPkt[5]; //PM10
arr[3]=coPkt[2]*256+coPkt[3];//CO
arr[4]=dPkt[3]*256+dPkt[4];//wind direction,八向,第五第六两位为360°
arr[5]=sPkt[3]*256+sPkt[4];//wind speed
Serial.println(arr[0]);
Serial.println(arr[1]);
}
void setup()
{
//与串口打印通信的只能用Serial默认串口,不能用自己定义的
Serial.begin(115200); //串口波特率,可以随便定义,与串口相同即可
uart1.begin(9600); //定义的传感器采用的软串口的波特率,与传感器特性相同
uart2.begin(9600); //定义的传感器采用的软串口的波特率,与传感器特性相同
uart3.begin(4800); //定义的传感器采用的软串口的波特率,与传感器特性相同
uart4.begin(4800); //定义的传感器采用的软串口的波特率,与传感器特性相同
void loop()
{
ProcessSerialData();
delay(1000);//采集数据间隔,自己设置
}
这里为了不让loop函数里面的内容过多,所以单独写了数据采集函数,在loop里直接调用即可,这样也更具条理性,通过不同的串口采集数据,通过Serial默认串口打印想要输出的数据。
4.Arduino 串口监视器

Arduino有自带的串口监视器,如上图,com口选择正确,波特率与代码设置相同,程序运行后打开就可以查看所打印的信息。



















 1982
1982

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











