






常用的库函数
这三个基本每个功能都有
1.复位串口到上电状态
2.初始结构体
3.给结构体赋初值
void USART_DeInit(USART_TypeDef* USARTx);
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);
void USART_StructInit(USART_InitTypeDef* USART_InitStruct);下面这两个都是常用的
1.开启串口
2.开启串口中断
void USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState);
void USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT, FunctionalState NewState);开启串口DMA功能
void USART_DMACmd(USART_TypeDef* USARTx, uint16_t USART_DMAReq, FunctionalState NewState);比较重要的发送和接收函数
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);最后就是标志位相关的函数
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
void USART_ClearFlag(USART_TypeDef* USARTx, uint16_t USART_FLAG);
获取和清除标志位
ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint16_t USART_IT);
void USART_ClearITPendingBit(USART_TypeDef* USARTx, uint16_t USART_IT);
获取中断标志位和清除中断标志位我们可以看到USART1是挂载到APB2总线上的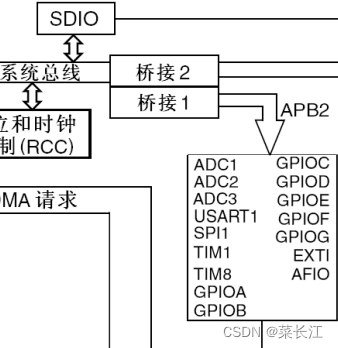
代码部分
第一步打开时钟
void Usart_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
}第二步配置GPIO()
从下图可以看出USART_TX /RX 分别对应 PA9/PA10

那么PA10和PA9模式该如何选择呢?看下图

现在开始配置
void Usart_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
//PA9_TX
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
//PA10_RX
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_10;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
}配置串口结构体并发送一个字节
void Usart_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
//PA9_TX
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
//PA10_RX
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_10;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
USART_InitTypeDef USART_InitStruct;
USART_InitStruct.USART_BaudRate=9600;//²¨ÌØÂÊдÈëBRR¼Ä´æÆ÷
USART_InitStruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode=USART_Mode_Tx|USART_Mode_Rx;
USART_InitStruct.USART_Parity=USART_Parity_No;
USART_InitStruct.USART_StopBits=USART_StopBits_1;
USART_InitStruct.USART_WordLength=USART_WordLength_8b;
USART_Init(USART1, &USART_InitStruct);
}
void Send_Byte(uint8_t byte)
{
USART_SendData(USART1, byte);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)!=SET);
//USART_ClearFlag(USART1,USART_FLAG_TC);
}
int Send_Arr_char(char *arr)
{
int lengh=Get_Arr_Lengh_char_1(arr);
while(lengh>0)
{
Send_Byte(*arr);
lengh--;
arr++;
}
}我们运行查看GPIOA的PA9状态看看是不是被设设置位推挽复用输出
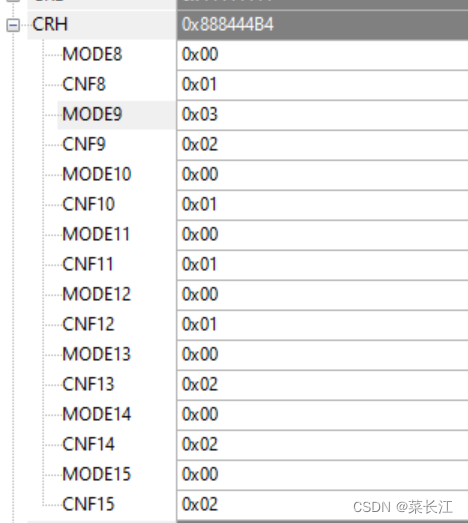
从上图可以看出MODE9=0X03 ,CNF9=0X02
从下表对应来看MODE9=0X03 也就是说是输出模式速度是50MHZ
CNF9=0X02 也就是说 复用推挽输出 由此可见PA9配置正确

我们在主函数定义了以arr数组,一个字符串
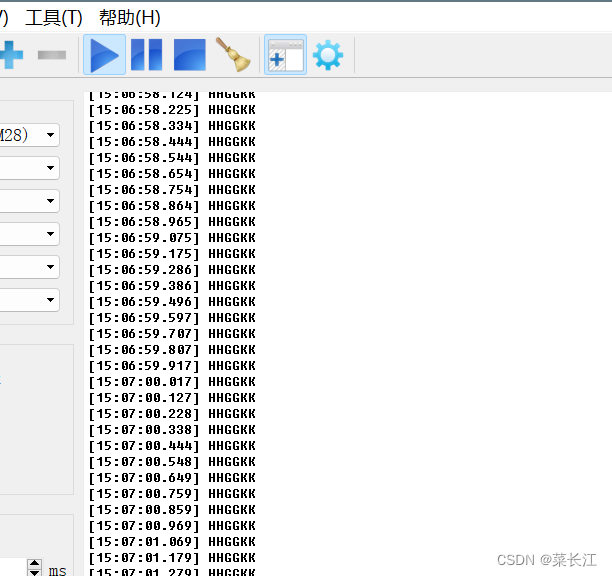
SubString_toEnd(str,0):从0开始截取到末尾再通过Send_Arr_char函数打印出来
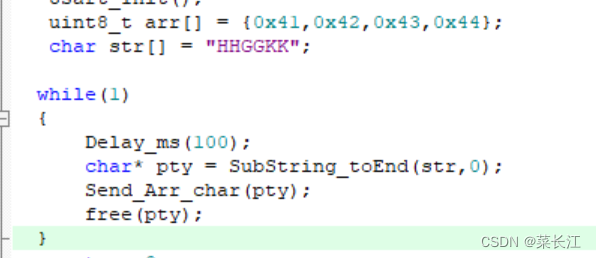
验证成功
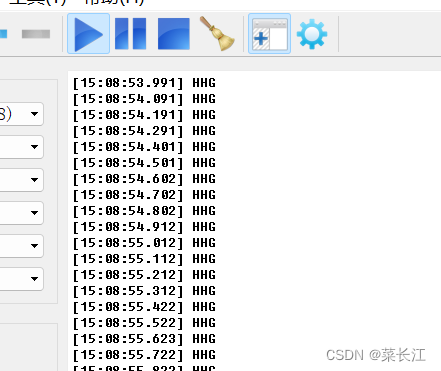
现在我们截取字符串 SubString(str,0,3):从0开始截取3位
验证也成功
以上是串口发送的验证
串口数据接收(查询模式非中断)
if(USART_GetFlagStatus(USART1,USART_FLAG_RXNE)==1)
{
uint16_t df= USART_ReceiveData(USART1);
OLED_ShowNum(3, 6,df, 5);
}比较常用的还是中断方式 我直接复制以前中断函数改一下
#include "stm32f10x.h" // Device header
#include "StringBuder.h"
#include <stdio.h>
#include <stdarg.h>
//配置EXTI
void Init_EXTI_Usart(void)
{
//EXTI和NVIC不需要初始化时钟
//选择中断引脚
//GPIO_EXTILineConfig(GPIO_PortSourceGPIOA,GPIO_PinSource14);
//初始化EXTI
EXTI_InitTypeDef EXTI_InitStruct;
EXTI_InitStruct.EXTI_Line=EXTI_Line1;
EXTI_InitStruct.EXTI_LineCmd=ENABLE;
EXTI_InitStruct.EXTI_Mode=EXTI_Mode_Interrupt;
EXTI_InitStruct.EXTI_Trigger=EXTI_Trigger_Rising;
EXTI_Init(&EXTI_InitStruct);
}
//配置NVIC
void Init_NVIC_Usart(void)
{
//分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//初始化
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannel=USART1_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority=1;
NVIC_Init(&NVIC_InitStruct);
}
void Usart_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
//PA9_TX
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
//PA10_RX
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IPU;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_10;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
USART_InitTypeDef USART_InitStruct;
USART_InitStruct.USART_BaudRate=9600;//
USART_InitStruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode=USART_Mode_Tx|USART_Mode_Rx;
USART_InitStruct.USART_Parity=USART_Parity_No;
USART_InitStruct.USART_StopBits=USART_StopBits_1;
USART_InitStruct.USART_WordLength=USART_WordLength_8b;
USART_Init(USART1, &USART_InitStruct);
Init_EXTI_Usart();
Init_NVIC_Usart();
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);
USART_Cmd(USART1,ENABLE);
}
void Send_Byte(uint8_t byte)
{
USART_SendData(USART1, byte);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)!=SET);
//USART_ClearFlag(USART1,USART_FLAG_TC);
}
void Send_Arr_String(char *arr)
{
int lengh=Get_Arr_Lengh_char_1(arr);
while(lengh>0)
{
Send_Byte(*arr);
lengh--;
arr++;
}
}
//重写Printf
int fputc(int ch, FILE *f)
{
Send_Byte(ch);
return ch;
}
void Serial_Printf(char *format, ...)
{
char String[100];
va_list arg;
va_start(arg, format);
vsprintf(String, format, arg);
va_end(arg);
Send_Arr_String(String);
}
//查询法接受串口数据
uint16_t Recve_Date(void )
{
if(USART_GetFlagStatus(USART1,USART_FLAG_RXNE)==1)
{
return USART_ReceiveData(USART1);
}
}














 357
357











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









