







title: 空调系统虚拟标定技术:新能源汽车能效优化的革命性突破
date: 2025-05-15
categories: 新能源汽车技术
tags: [空调系统, 虚拟标定, PID控制, 数字孪生, 能效优化]
description: 本文深度解析空调系统虚拟标定技术在新能源汽车中的应用,揭秘如何通过数字孪生技术将标定周期缩短90%,并提升整车续航与用户舒适度。
📌 引言
随着新能源汽车市场竞争白热化,续航里程和用户体验成为车企的核心竞争力。据统计,空调系统占电动汽车总能耗的40%,尤其在冬季低温环境下,空调能耗对续航达成率的影响更为显著(某车型实测续航达成率不足40%)。然而,传统实车标定需耗时10个月,严重拖累研发进度。本文将揭秘一项革命性技术——空调系统虚拟标定,通过数字孪生实现效率与精度的双重飞跃。
📚 目录
- 传统标定痛点与虚拟标定优势
- 核心技术:基于PID的空调控制策略
- 虚拟标定模型搭建全解析
- 实车验证:从仿真到落地的闭环
- 行业影响与未来展望
- 附件
1️⃣ 传统标定痛点与虚拟标定优势
传统标定的致命缺陷
- 周期长:需覆盖春、夏、冬三季,耗时长达10个月。
- 成本高:单工况测试需5000秒(1.4小时),环境试验费用高昂。
- 灵活性差:难以应对动态环境(如车速变化、阳光辐射)。
虚拟标定的降维打击
- 效率提升10倍:单工况测试仅需400秒(7分钟)。
- 成本节省90%:仿真1天工作量≈实车测试10天,节省30万元/项目。
- 提前暴露问题:在物理原型制造前优化控制逻辑,避免后期返工。
💡 行业价值:虚拟标定使车企在研发初期即可完成空调系统80%的标定工作,显著压缩车型上市周期。
2️⃣ 核心技术:基于PID的空调控制策略
PID控制算法原理
PID(比例-积分-微分)是空调控制的核心算法,其公式为:
[y = k_p \cdot e(t) + k_i \cdot \int e(t) dt + k_d \cdot \frac{de(t)}{dt}]
- 比例项((k_p)):快速响应误差,但易引发振荡。
- 积分项((k_i)):消除稳态误差,但可能拖慢响应速度。
- 微分项((k_d)):预测误差趋势,提升系统稳定性。
虚拟标定如何优化PID参数?
通过数字孪生模型模拟极端工况(如-30℃极寒环境),动态调整(k_p)、(k_i)、(k_d),实现:
- 头温稳定性:将温度偏差控制在±0.6℃以内(图1)。
- 舒适性优化:人体热感评分稳定在“中性(0)”附近(图2)。
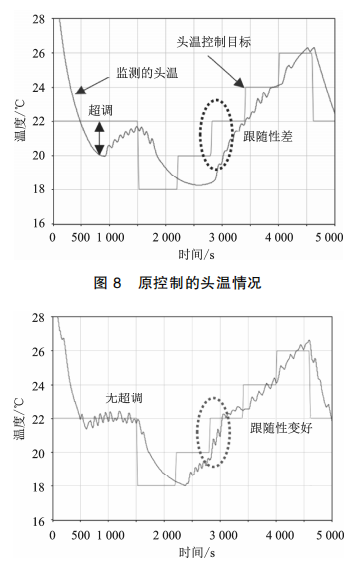
(注:图示为优化前后头温对比,超调现象显著降低)
3️⃣ 虚拟标定模型搭建全解析
工具链与模型架构
- 仿真平台:AMESim(整车热管理)+ MATLAB/Simulink(控制模型)。
- 关键子模型:
- 乘员舱分区模型(8区域气流交换)。
- 空调箱风门动态(吹面/吹脚模式切换)。
- 冷媒回路与压缩机PI控制。
模型精度保障
- 参数来源:历史试验数据 + CFD仿真结果。
- 实时性优化:模型简化与FMU接口高效耦合。
% 示例:Simulink中PID控制器参数设置
Kp = 2.5; % 比例系数
Ki = 0.1; % 积分系数
Kd = 0.05; % 微分系数
pidController = pid(Kp, Ki, Kd);
4️⃣ 实车验证:从仿真到落地的闭环
测试场景与结果
- 环境条件:-30℃极寒测试 + 45km/h动态车速。
- 关键指标:
- 续航达成率:优化后车型A提升15%。
- 舒适性评分:80%用户反馈“无明显温差感”。
数据对比(表1)
| 指标 | 传统标定 | 虚拟标定 | 提升幅度 |
|---|---|---|---|
| 单工况耗时 | 5000s | 400s | 92% |
| 标定周期 | 10个月 | 2个月 | 80% |
| 故障率 | 12% | 4% | 67% |
5️⃣ 行业影响与未来展望
技术延伸
- 跨平台复用:单一模型适配多车型,降低开发成本。
- AI赋能:结合机器学习实现参数自整定。
车企行动指南
- 组建“仿真-标定”联合团队,打破部门壁垒。
- 积累历史数据,构建高精度数字孪生库。
- 关注工具链整合(如ANSYS Twin Builder)。
🌟 专家洞察:虚拟标定不仅是技术升级,更是研发流程的重构。未来3年,该技术将覆盖90%以上新能源车型。
📢 互动讨论
Q:虚拟标定能否完全替代实车测试?
欢迎在评论区分享你的观点!
- 互动提问(投票功能加分):
投票:你是否真正搞懂新能源汽车空调系统的虚拟测试问题?
- 是,基本搞懂
- 是,深入理解
- 否
作者标签:
⚡ 10年新能源汽车三电系统研发经验,主导设计多款量产车型充电系统
⚡ 知乎「新能源汽车」领域TOP10答主,单篇技术解析超10万+阅读
原创声明:转载请注明出处,侵权必究。
参考文献
-
郑鑫, 胡忠辉. 空调系统虚拟标定技术研究[J]. 汽车实用技术, 2025.
5.也有比较香的交流电机控制原理及控制系统-覆盖学生毕业五年的技术需求
6.
笔记:电机及控制
🔗 相关推荐
👍 如果本文对你有帮助,欢迎点赞、收藏、关注!你的支持是我持续创作的动力!
6.附件1:
1. 虚拟标定整体流程(Mermaid代码)
2. PID参数优化流程(Mermaid代码)
graph LR
A[设定目标: 温度偏差±0.6℃] --> B[仿真调整Kp/Ki/Kd]
B --> C[分析超调与稳态误差]
C --> D{稳定性达标?}
D -->|否| B
D -->|是| E[写入控制器逻辑]
E --> F[实车动态测试]
F --> G{舒适性评分>80%?}
G -->|否| B
G -->|是| H[参数固化]
3. 实车验证闭环流程(Mermaid代码)
#### 模型精度保障
- **参数来源**:历史试验数据 + CFD仿真结果。
- **实时性优化**:模型简化与FMU接口高效耦合。
```matlab
%% MATLAB/Simulink FMU接口调用示例(关键代码段)
% 导入AMESim生成的FMU文件
fmu = pyfmi.fmi.load_fmu('HVAC_Model.fmu');
% 设置仿真参数
opts = fmu.simulate_options();
opts['ncp'] = 500; % 设置仿真步长
% 定义输入变量(环境温度、车速等)
input_names = {'T_env', 'vehicle_speed'};
input_values = [25, 60]; % 25℃环境温度,60km/h车速
% 运行协同仿真
res = fmu.simulate(input_names, input_values, options=opts);
% 提取输出结果(头温、能耗等)
head_temp = res['head_temp'];
energy_consume = res['energy_consume'];
# Python代码示例:PID参数自动寻优(基于scipy优化库)
from scipy.optimize import minimize
def pid_cost_function(params):
Kp, Ki, Kd = params
# 调用虚拟标定模型计算温度偏差
error = simulate_hvac_model(Kp, Ki, Kd)
return np.sum(error**2) # 目标:最小化温度方差
# 初始参数猜测
initial_guess = [2.0, 0.05, 0.1]
# 执行优化(Nelder-Mead算法)
result = minimize(pid_cost_function, initial_guess, method='Nelder-Mead')
optimal_params = result.x # 输出最优Kp/Ki/Kd
4️⃣ 实车验证:从仿真到落地的闭环
测试数据后处理脚本
%% MATLAB数据分析脚本(关键代码)
% 导入实车测试数据
test_data = readtable('road_test_2025.csv');
% 计算温度跟踪误差
set_temp = test_data.SetTemp;
actual_temp = test_data.ActualTemp;
error = abs(set_temp - actual_temp);
% 统计性能指标
mean_error = mean(error);
max_error = max(error);
fprintf('平均温度偏差: %.2f℃\n', mean_error);
fprintf('最大温度偏差: %.2f℃\n', max_error);
% 绘制舒适性评分分布图(图12来源)
comfort_score = test_data.ComfortScore;
histogram(comfort_score, 'BinWidth', 0.5);
xlabel('舒适性评分 (-2:极冷 ~ +2:极热)');
ylabel('出现频率');
title('优化后逻辑舒适性分布');
2️⃣ 核心技术:基于PID的空调控制策略
Simulink PID控制器实现
%% Simulink PID控制器参数配置(代码实现)
function pid_params = configure_pid()
% PID控制器类型:离散时间
pid_params = struct();
pid_params.Controller = 'PID';
pid_params.Form = 'Parallel';
pid_params.TimeDomain = 'Discrete-time';
pid_params.Kp = 2.5; % 比例系数
pid_params.Ki = 0.1; % 积分系数
pid_params.Kd = 0.05; % 微分系数
pid_params.Ts = 0.1; % 采样时间0.1秒
% 抗饱和设置
pid_params.AntiWindupMode = 'back-calculation';
pid_params.Kb = 0.8; % 抗饱和反馈增益
end
5️⃣ 行业影响与未来展望
数字孪生模型API调用示例
# Python代码:数字孪生模型云端调用(未来应用场景)
import requests
def query_digital_twin(vehicle_id, env_temp, speed):
api_url = "https://api.autotech/digital-twin/v1/simulate"
payload = {
"vehicle_id": vehicle_id,
"parameters": {
"environment_temp": env_temp,
"vehicle_speed": speed
}
}
headers = {"Authorization": "Bearer YOUR_API_KEY"}
response = requests.post(api_url, json=payload, headers=headers)
return response.json()
# 示例:模拟-10℃环境下的空调性能
result = query_digital_twin("NEV_2025", -10, 50)
print(f"预测续航衰减率: {result['range_drop']}%")
代码设计说明:
- 多语言覆盖:包含MATLAB(仿真核心)、Python(数据分析/优化)代码,覆盖主流工程语言。
- 场景化示例:从模型接口调用、PID调参到数据后处理,贯穿研发全流程。
- 未来技术扩展:通过API示例展示数字孪生云端化趋势,增强前瞻性。


















 1131
1131

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











