






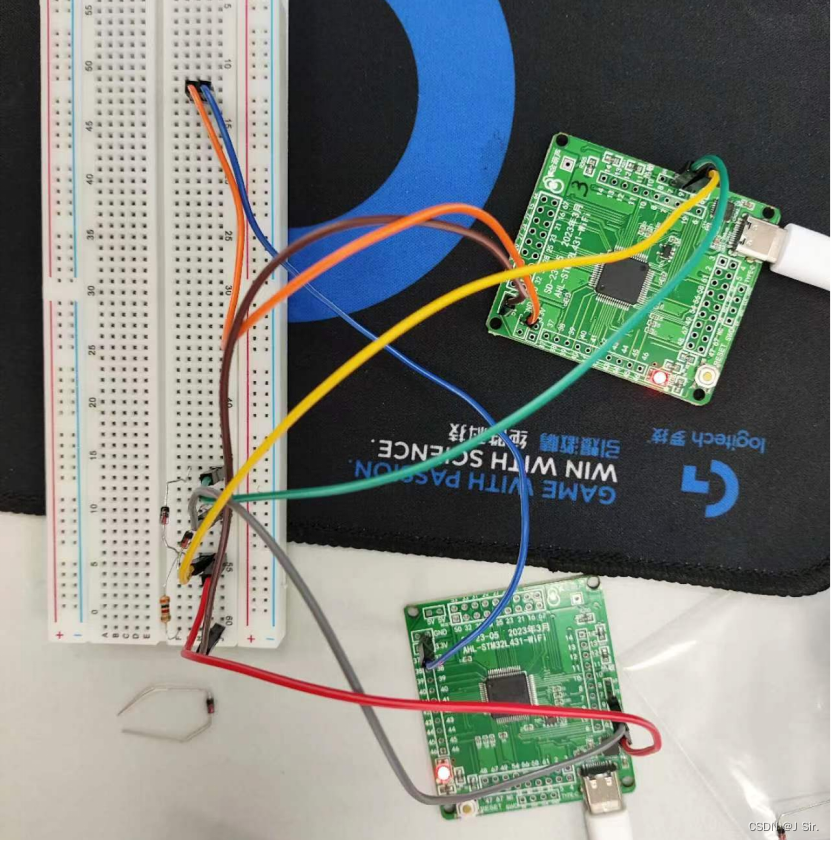
1、2个或以上同学相互连接,利用CAN通信,向对方发送带有本人姓名的信息。连线方式:按基本原理性电路(不带收发器芯片)连接,参考教材图10-1。
can.c的代码(供参考):
//======================================================================
//文件名称:can.c
//功能概要:uart底层驱动构件源文件
//版权所有:苏州大学嵌入式系统与物联网研究所(sumcu.suda.edu.cn)
//更新记录:2021-02-03 V1.0 JJL
//======================================================================
#include "can.h"
CAN_TypeDef *CAN_ARR[] = {(CAN_TypeDef*)CAN1_BASE};
IRQn_Type table_irq_can[2] = {CAN1_RX0_IRQn, CAN1_RX1_IRQn};
uint8_t can_send_once(uint8_t canNo, uint32_t DestID, uint16_t len ,uint8_t* buff);
uint8_t CAN_HWInit(uint8_t CANChannel);
uint8_t CAN_SWInit_Entry(uint8_t canNo);
void CAN_SWInit_CTLMode(uint8_t canNo);
void CAN_SWInit_BT(uint8_t canNo, uint32_t CANMode, uint32_t Prescaler);
uint8_t CAN_SWInit_Quit(uint8_t canNo);
uint8_t CANFilterConfig(uint8_t canNo, uint32_t canID, uint32_t FilterBank, uint32_t Can_Rx_FifoNo, uint8_t IsActivate, uint32_t FilterMode, uint32_t FilterScale);
//=====================================================================
//函数名称:can_init
//函数返回:无
//参数说明:canNo:模块号,本芯片只有CAN_1
// canID:自身CAN节点的唯一标识,例如按照CANopen协议给出
// BitRate:位速率
//功能概要:初始化CAN模块
//=====================================================================
void can_init(uint8_t canNo, uint32_t canID, uint32_t BitRate)
{
//声明Init函数使用的局部变量
uint32_t CANMode;
uint32_t CANFilterBank;
uint32_t CANFiltermode;
uint32_t CAN_Filterscale;
//给Init函数使用的局部变量赋初值
CANMode = CAN_MODE_NORMAL; //2024.6
CANFilterBank = CANFilterBank0;
CANFiltermode = CAN_FILTERMODE_IDMASK;
CAN_Filterscale = CAN_FILTERSCALE_32BIT;
//(1)CAN总线硬件初始化
CAN_HWInit(CAN_CHANNEL);
//(2)CAN总线进入软件初始化模式
CAN_SWInit_Entry(canNo);
//(3)CAN总线模式设置
CAN_SWInit_CTLMode(canNo);
//(4)CAN总线位时序配置
CAN_SWInit_BT(canNo,CANMode,BitRate);
//(5)CAN总线过滤器初始化
CANFilterConfig(canNo, canID, CANFilterBank, CAN_RX_FIFO0, 1, CANFiltermode, CAN_Filterscale);
//(6)CAN总线退出软件初始化模式,进入正常模式
CAN_SWInit_Quit(canNo);
}
//=====================================================================
//函数名称:can_send
//函数返回:0=正常,1=错误
//参数说明:canNo:模块号,本芯片只有CAN_1
// DestID:目标CAN节点的唯一标识,例如按照CANopen协议给出
// len:待发送数据的字节数
// buff:待发送数据发送缓冲区首地址
//功能概要:CAN模块发送数据
//=====================================================================
uint8_t can_send(uint8_t canNo, uint32_t DestID, uint16_t len ,uint8_t* buff)
{
if(DestID > 0x1FFFFFFFU) return 1;
uint8_t send_length;
for(int i = len; i > 0; i = i-8)
{
send_length = (i>8)?8:i;
if(can_send_once(canNo,DestID,send_length,buff+len-i) == 1) //2024.6
{
return 1;
}
}
return 0;
}
//=====================================================================
//函数名称:can_recv
//函数返回:接收到的字节数
//参数说明:canNo:模块号,本芯片只有CAN_1
// buff:接收到的数据存放的内存区首地址
//功能概要:在CAN模块接收中断中调用本函数接收已经到达的数据
//=====================================================================
uint8_t can_recv(uint8_t canNo, uint8_t *buff)
{
uint8_t len;
uint32_t RxFifo = CAN_RX_FIFO0;
//(1)判断哪个邮箱收到了报文信息
if(RxFifo == CAN_RX_FIFO0)
{
if ((CAN_ARR[canNo-1]->RF0R & CAN_RF0R_FMP0) == 0U) //2024.6
{
return 1;
}
}
else
{
if ((CAN_ARR[canNo-1]->RF1R & CAN_RF1R_FMP1) == 0U)
{
return 1;
}
}
//(2)获取数据长度
len = (CAN_RDT0R_DLC & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDTR) >> CAN_RDT0R_DLC_Pos; //2024.6
//(3)获取数据帧中的数据
buff[0] = (uint8_t)((CAN_RDL0R_DATA0 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDLR) >> CAN_RDL0R_DATA0_Pos);
buff[1] = (uint8_t)((CAN_RDL0R_DATA1 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDLR) >> CAN_RDL0R_DATA1_Pos);
buff[2] = (uint8_t)((CAN_RDL0R_DATA2 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDLR) >> CAN_RDL0R_DATA2_Pos);
buff[3] = (uint8_t)((CAN_RDL0R_DATA3 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDLR) >> CAN_RDL0R_DATA3_Pos);
buff[4] = (uint8_t)((CAN_RDH0R_DATA4 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDHR) >> CAN_RDH0R_DATA4_Pos);
buff[5] = (uint8_t)((CAN_RDH0R_DATA5 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDHR) >> CAN_RDH0R_DATA5_Pos);
buff[6] = (uint8_t)((CAN_RDH0R_DATA6 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDHR) >> CAN_RDH0R_DATA6_Pos);
buff[7] = (uint8_t)((CAN_RDH0R_DATA7 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDHR) >> CAN_RDH0R_DATA7_Pos);
//(4)清除标志位,等待接收下一帧数据
if (RxFifo == CAN_RX_FIFO0)
{
SET_BIT(CAN_ARR[canNo-1]->RF0R, CAN_RF0R_RFOM0); //2024.6
}
else
{
SET_BIT(CAN_ARR[canNo-1]->RF1R, CAN_RF1R_RFOM1);
}
return len;
}
//=====================================================================
//函数名称:CAN_enable_re_int
//函数返回:无
//参数说明:canNo:模块基地址号,Can_Rx_FifoNo:中断使用的邮箱号
//功能概要:CAN接收中断开启
//=====================================================================
void can_enable_recv_int(uint8_t canNo)
{
uint8_t Can_Rx_FifoNo;
Can_Rx_FifoNo = CAN_RX_FIFO0;
if(Can_Rx_FifoNo == CAN_RX_FIFO0)
SET_BIT(CAN_ARR[canNo-1]->IER, CAN_IER_FMPIE0); //2024.6
else
SET_BIT(CAN_ARR[canNo-1]->IER,CAN_IER_FMPIE1);
NVIC_EnableIRQ(table_irq_can[Can_Rx_FifoNo]); //2024.6
}
//=====================================================================
//函数名称:can_disable_recv_int
//函数返回:无
//参数说明:canNo:模块号,本芯片只有CAN_1
//功能概要:关闭CAN接收中断
//=====================================================================
void can_disable_recv_int (uint8_t canNo)
{
uint8_t Can_Rx_FifoNo;
Can_Rx_FifoNo = CAN_RX_FIFO0;
if(Can_Rx_FifoNo == CAN_RX_FIFO0)
CLEAR_BIT(CAN_ARR[canNo-1]->IER, CAN_IER_FMPIE0);
else
CLEAR_BIT(CAN_ARR[canNo-1]->IER,CAN_IER_FMPIE1);
NVIC_DisableIRQ(table_irq_can[Can_Rx_FifoNo]);
}
//=====================================================================
//函数名称:can_send_once
//函数返回:0=正常,1=错误
//参数说明:canNo:模块号,本芯片只有CAN_1
// DestID:目标CAN节点的唯一标识,例如按照CANopen协议给出
// len:待发送数据的字节数
// buff:待发送数据发送缓冲区首地址
//功能概要:CAN模块发送一次数据
//=====================================================================
uint8_t can_send_once(uint8_t canNo, uint32_t DestID, uint16_t len ,uint8_t* buff)
{
//(1)定义Can发送函数所需要用到的变量
uint32_t transmit_mailbox;
uint32_t register_tsr;
uint32_t rtr;
rtr = CAN_RTR_DATA;
register_tsr = READ_REG(CAN_ARR[canNo-1]->TSR);
//(2)判断3个邮箱中是否有空闲邮箱,若有,选取其中一个进行发送,选取顺序为1,2,3
if (((register_tsr & CAN_TSR_TME0) != 0U) ||
((register_tsr & CAN_TSR_TME1) != 0U) ||
((register_tsr & CAN_TSR_TME2) != 0U))
{
transmit_mailbox = (register_tsr & CAN_TSR_CODE) >> CAN_TSR_CODE_Pos; //2024.6
if(transmit_mailbox > 2U)
{
return 1;
}
//(2.1)判断并设置发送帧为标准帧还是扩展帧
if(DestID <= 0x7FFU) //2024.6
{
CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TIR = ((DestID << CAN_TI0R_STID_Pos)|CAN_ID_STD|rtr); //2024.6
}
else
{
CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TIR = ((DestID << CAN_TI0R_EXID_Pos)|CAN_ID_EXT|rtr); //2024.6
}
//(2.2)设置发送帧的数据长度
CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TDTR = len;
//SET_BIT(CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TDTR, CAN_TDT0R_TGT);
//(2.3)设置发送帧的数据
WRITE_REG(CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TDHR, //2024.6
((uint32_t)buff[7] << CAN_TDH0R_DATA7_Pos) |
((uint32_t)buff[6] << CAN_TDH0R_DATA6_Pos) |
((uint32_t)buff[5] << CAN_TDH0R_DATA5_Pos) |
((uint32_t)buff[4] << CAN_TDH0R_DATA4_Pos));
WRITE_REG(CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TDLR,
((uint32_t)buff[3] << CAN_TDL0R_DATA3_Pos) |
((uint32_t)buff[2] << CAN_TDL0R_DATA2_Pos) |
((uint32_t)buff[1] << CAN_TDL0R_DATA1_Pos) |
((uint32_t)buff[0] << CAN_TDL0R_DATA0_Pos));
//(2.4)发送Can数据报
SET_BIT(CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TIR, CAN_TI0R_TXRQ); //2024.6
return 0;
}
else
{
return 1;
}
}
//=====================================================================
//函数名称:CAN_HWInit
//函数返回:0=正常,1=错误
//参数说明:CANChannel:硬件引脚组号,共有3组,分别为PTA11&PTA12(CAN_CHANNEL0),PTB8&PTB9(CAN_CHANNEL1),PTD0&PTD1(2)
//功能概要:CAN模块引脚初始化
//=====================================================================
uint8_t CAN_HWInit(uint8_t CANChannel)
{
if(CANChannel < 0 || CANChannel > 2)
{
return 1;
}
if(CANChannel == 0)
{
RCC->APB1ENR1 |= RCC_APB1ENR1_CAN1EN; //2024.6
RCC->AHB2ENR |= RCC_AHB2ENR_GPIOAEN;
GPIOA->MODER &= ~(GPIO_MODER_MODE11|GPIO_MODER_MODE12);
GPIOA->MODER |= (GPIO_MODER_MODE11_1|GPIO_MODER_MODE12_1); //2024.6
GPIOA->AFR[1] &= ~(GPIO_AFRH_AFSEL11|GPIO_AFRH_AFSEL12);
GPIOA->AFR[1] |= (GPIO_AFRH_AFSEL11_0|GPIO_AFRH_AFSEL11_3)|(GPIO_AFRH_AFSEL12_0|GPIO_AFRH_AFSEL12_3); //2024.6
}
else if(CANChannel == 1)
{
RCC->APB1ENR1 |= RCC_APB1ENR1_CAN1EN;
RCC->AHB2ENR |= RCC_AHB2ENR_GPIOBEN;
GPIOB->MODER &= ~(GPIO_MODER_MODE8|GPIO_MODER_MODE9);
GPIOB->MODER |= (GPIO_MODER_MODE8_1|GPIO_MODER_MODE9_1);
GPIOB->AFR[1] &= ~(GPIO_AFRH_AFSEL8|GPIO_AFRH_AFSEL9);
GPIOB->AFR[1] |= ((GPIO_AFRH_AFSEL8_0|GPIO_AFRH_AFSEL8_3)|
(GPIO_AFRH_AFSEL9_0|GPIO_AFRH_AFSEL9_3));
}
else
{
RCC->APB1ENR1 |= RCC_APB1ENR1_CAN1EN;
RCC->AHB2ENR |= RCC_AHB2ENR_GPIODEN;
GPIOD->MODER &= ~(GPIO_MODER_MODE0|GPIO_MODER_MODE1);
GPIOD->MODER |= (GPIO_MODER_MODE0_1|GPIO_MODER_MODE1_1);
GPIOD->AFR[0] &= ~(GPIO_AFRL_AFSEL0|GPIO_AFRL_AFSEL1);
GPIOD->AFR[0] |= ((GPIO_AFRL_AFSEL0_0 | GPIO_AFRL_AFSEL0_3)|
(GPIO_AFRL_AFSEL1_0 | GPIO_AFRL_AFSEL1_3));
}
return 0;
}
//=====================================================================
//函数名称:CAN_SWInit_Entry
//函数返回:0=正常,1=错误
//参数说明:canNo:模块基地址号,本芯片只有CAN_1,
//功能概要:进入初始化模式
//=====================================================================
uint8_t CAN_SWInit_Entry(uint8_t canNo)
{
int i;
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_SLEEP); //2024.6
i = 0;
while ((CAN_ARR[canNo-1]->MSR & CAN_MSR_SLAK) != 0U) //2024.6
{
if(i++ > 0x30000)
{
return 1;
}
}
SET_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_INRQ); //2024.6
i = 0;
while ((CAN_ARR[canNo-1]->MSR & CAN_MSR_INAK) == 0U)
{
if(i++ > 0x30000)
{
return 1;
}
}
return 0;
}
//=====================================================================
//函数名称:CAN_SWInit_CTLMode
//函数返回:无
//参数说明:canNo:模块基地址号,本芯片只有CAN_1,
//功能概要:CAN总线模式设置
//=====================================================================
void CAN_SWInit_CTLMode(uint8_t canNo)
{
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_TTCM); //2024.6
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_ABOM); //2024.6
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_AWUM); //2024.6
SET_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_NART); //2024.6
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_RFLM); //2024.6
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_TXFP); //2024.6
}
//函数名称:CAN_SWInit_CTLMode
//函数返回:无
//参数说明:canNo:模块基地址号,本芯片只有CAN_1,
// CANMode:CAN总线工作模式,分别为正常模式(CAN_MODE_NORMAL)、回环模式(CAN_MODE_LOOPBACK)、
// 静默模式(CAN_MODE_SILENT)以及回环与静默组合模式(CAN_MODE_SILENT_LOOPBACK)
//功能概要:CAN总线位时序配置
void CAN_SWInit_BT(uint8_t canNo, uint32_t CANMode, uint32_t Prescaler)
{
CAN_ARR[canNo-1]->BTR |= ((uint32_t)(Prescaler-1)|CAN_SJW_1TQ|CAN_BTR_TS1_1|CAN_BTR_TS1_0|CAN_BTR_TS2_2|CANMode); //2024.6
}
//=====================================================================
//函数名称:CAN_SWInit_Quit
//函数返回:0=正常,1=错误
//参数说明:canNo:模块基地址号
//功能概要:退出初始化模式,进入正常模式
//=====================================================================
uint8_t CAN_SWInit_Quit(uint8_t canNo)
{
int i;
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_INRQ); //2024.6
i = 0;
while ((CAN_ARR[canNo-1]->MSR & CAN_MSR_INAK) != 0U) //2024.6
{
if (i++ > 0x30000)
{
return 1;
}
}
return 0;
}
//=====================================================================
//函数名称: CANFilterConfig
//函数返回:0=正常,1=错误
//参数说明: canNo:模块基地址号,
// canID:自身CAN节点的唯一标识,例如按照CANopen协议给出
// Can_Rx_FifoNo:中断使用的邮箱号,
// IsActivate:是否激活过滤器
// CANFilterBank:CAN总线过滤器组选择,共有28个,(CANFilterBank0~CANFilterBank27)
// CANFiltermode:CAN总线过滤器模式,分别为掩码模式(CAN_FILTERMODE_IDMASK)和列表模式(CAN_FILTERMODE_IDLIST)
// CAN_Filterscale:CAN总线过滤器位数,分别为32位(CAN_FILTERSCALE_32BIT)和16位(CAN_FILTERSCALE_16BIT)
//功能概要:CAN接收中断开启
//=====================================================================
uint8_t CANFilterConfig(uint8_t canNo, uint32_t CanID, uint32_t FilterBank, uint32_t Can_Rx_FifoNo, uint8_t IsActivate, uint32_t FilterMode, uint32_t FilterScale)
{
uint32_t FilterIdHigh, FilterIdLow, FilterMaskIdHigh, FilterMaskIdLow, filternbrbitpos;
if(CanID <= 0x7FFU) CanID = CanID << CAN_TI0R_STID_Pos; //2024.6
FilterIdHigh = (CanID >> 16) & 0xFFFF; //2024.6
FilterIdLow = (CanID & 0xFFFF); //2024.6
FilterMaskIdHigh = 0xFFE0; //2024.6
FilterMaskIdLow = 0x0000; //2024.6
filternbrbitpos = (uint32_t)1 << (FilterBank & 0x1FU); //2024.6
//设置过滤器初始化模式 (FINIT=1),在此模式下可以进行过滤器初始化
SET_BIT(CAN_ARR[canNo-1]->FMR, CAN_FMR_FINIT); //2024.6
CLEAR_BIT(CAN_ARR[canNo-1]->FA1R, filternbrbitpos); //2024.6
if (FilterScale == CAN_FILTERSCALE_16BIT)
{
CLEAR_BIT(CAN_ARR[canNo-1]->FS1R, filternbrbitpos);
CAN_ARR[canNo-1]->sFilterRegister[FilterBank].FR1 =
((0x0000FFFFU & (uint32_t)FilterMaskIdLow) << 16U) |
(0x0000FFFFU & (uint32_t)FilterIdLow);
CAN_ARR[canNo-1]->sFilterRegister[FilterBank].FR2 =
((0x0000FFFFU & (uint32_t)FilterMaskIdHigh) << 16U) |
(0x0000FFFFU & (uint32_t)FilterIdHigh);
}
if (FilterScale == CAN_FILTERSCALE_32BIT) //2024.6
{
SET_BIT(CAN_ARR[canNo-1]->FS1R, filternbrbitpos); //2024.6
CAN_ARR[canNo-1]->sFilterRegister[FilterBank].FR1 = //2024.6
((0x0000FFFFU & (uint32_t)FilterIdHigh) << 16U) |
(0x0000FFFFU & (uint32_t)FilterIdLow);
CAN_ARR[canNo-1]->sFilterRegister[FilterBank].FR2 =
((0x0000FFFFU & (uint32_t)FilterMaskIdHigh) << 16U) |
(0x0000FFFFU & (uint32_t)FilterMaskIdLow);
}
if (FilterMode == CAN_FILTERMODE_IDMASK) //2024.6
{
CLEAR_BIT(CAN_ARR[canNo-1]->FM1R, filternbrbitpos); //2024.6
}
else
{
SET_BIT(CAN_ARR[canNo-1]->FM1R, filternbrbitpos);
}
if (Can_Rx_FifoNo == CAN_FILTER_FIFO0) //2024.6
{
CLEAR_BIT(CAN_ARR[canNo-1]->FFA1R, filternbrbitpos); //2024.6
}
else
{
SET_BIT(CAN_ARR[canNo-1]->FFA1R, filternbrbitpos);
}
if (IsActivate == 1) //2024.6
{
SET_BIT(CAN_ARR[canNo-1]->FA1R, filternbrbitpos); //2024.6
}
//退出过滤器初始化模式 (FINIT=0)
CLEAR_BIT(CAN_ARR[canNo-1]->FMR, CAN_FMR_FINIT); //2024.6
return 0;
}
然后在main.c的基础上做一些小的改变:
#define GLOBLE_VAR
#include "includes.h" //包含总头文件
//----------------------------------------------------------------------
//声明使用到的内部函数
//main.c使用的内部函数声明处
//----------------------------------------------------------------------
//主函数,一般情况下可以认为程序从此开始运行(实际上有启动过程,参见书稿)
int main(void)
{
//(1)======启动部分(开头)==========================================
//(1.1)声明main函数使用的局部变量
vuint32_t mMainLoopCount; //主循环次数变量
uint8_t mFlag; //灯的状态标志
uint32_t mLightCount; //灯的状态切换次数
uint32_t localMsgID;
uint32_t txMsgID;
uint32_t BitRate;
//(1.2)【不变】关总中断
DISABLE_INTERRUPTS;
//(1.3)给主函数使用的局部变量赋初值
mMainLoopCount=0; //主循环次数变量
mFlag='A'; //灯的状态标志
mLightCount=0; //灯的闪烁次数
localMsgID = 0x0AU;
txMsgID = 0x0BU;
BitRate = 36;
//(1.4)给全局变量赋初值
//(1.5)用户外设模块初始化
gpio_init(LIGHT_RED,GPIO_OUTPUT,LIGHT_ON); //初始化蓝灯
emuart_init(UART_User,115200);
uart_init(UART_3,115200);
//【***CAN模块初始化***】
can_init(CAN_1,localMsgID,BitRate);
//(1.6)使能模块中断
uart_enable_re_int(UART_User);
uart_enable_re_int(UART_3);
//【***使能CAN模块中断***】
can_enable_recv_int(CAN_1);
//(1.7)【不变】开总中断
ENABLE_INTERRUPTS;
//(1)======启动部分(结尾)==========================================
//(2)======主循环部分(开头)========================================
for(;;) //for(;;)(开头)
{
//(2.1)主循环次数变量+1
mMainLoopCount++;
//(2.2)未达到主循环次数设定值,继续循环
if (mMainLoopCount<=12889000) continue;
//(2.3)达到主循环次数设定值,执行下列语句,进行灯的亮暗处理
//(2.3.1)清除循环次数变量
mMainLoopCount=0;
//(2.3.2)如灯状态标志mFlag为'L',灯的闪烁次数+1并显示,改变灯状态及标志
if (mFlag=='L') //判断灯的状态标志
{
mLightCount++;
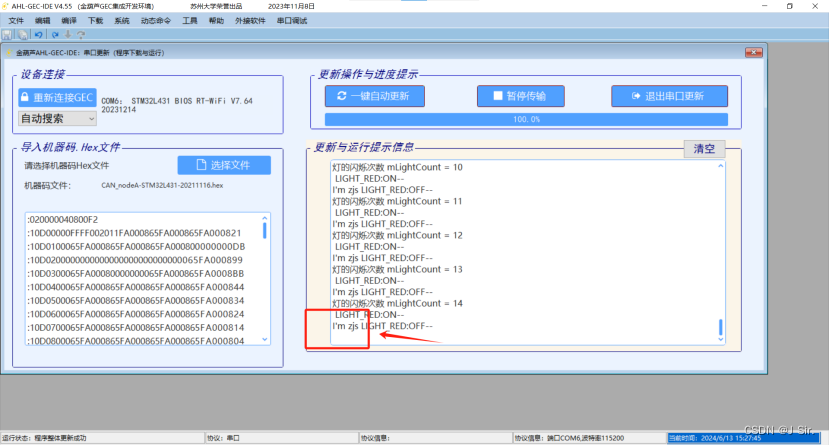
printf("灯的闪烁次数 mLightCount = %d\n",mLightCount);
mFlag='A'; //灯的状态标志
gpio_set(LIGHT_RED,LIGHT_ON); //灯“亮”
printf(" LIGHT_RED:ON--\n"); //串口输出灯的状态
//【***CAN模块发送一帧数据***】
if(can_send(CAN_1, txMsgID, 8, (uint8_t*)"I'm zjs\n") != 0) printf("failed\r\n");
}
//(2.3.3)如灯状态标志mFlag为'A',改变灯状态及标志
else
{
mFlag='L'; //灯的状态标志
gpio_set(LIGHT_RED,LIGHT_OFF); //灯“暗”
printf(" LIGHT_RED:OFF--\n"); //串口输出灯的状态
}
} //for(;;)结尾
//(2)======主循环部分(结尾)========================================
} //main函数(结尾)
//======以下为主函数调用的子函数===========================================
//========================================================================
/*
知识要素:
(1)main.c是一个模板,该文件所有代码均不涉及具体的硬件和环境,通过调用构件
实现对硬件的干预。
(2)本文件中对宏GLOBLE_VAR进行了定义,所以在包含"includes.h"头文件时,会定
义全局变量,在其他文件中包含"includes.h"头文件时,
编译时会自动增加extern
*/
一开始尝试三台电脑建立信息传输,三台电脑运行无误:
然后发现NodeA电脑能够接受其他两台电脑的信息,而其中一台不能接收(但没显示faiied)
后面检查的时候经过张老师的分析应该是面包板处接线的时候出现了一点问题:

然后,我们又重新改为两台电脑之间的开发板连接并进行信息传输并取得成功:
2、在ADC实验中,结合热敏电阻,分别通过触摸芯片表面和热敏电阻,引起A/D值变化,显示芯片内部温度和当前温度。
//函数名称:Regression_Ext_Temp//功能概要:将读到的环境温度AD值转换为实际温度
//参数说明:tmpAD:通过adc read函数得到的AD值
//函数返回:实际温度值
float Regression Ext Temp(uint16_t tmpAD)
float Vtemp, Rtemp, temp;
if(tmpAD<=72){
return -274;
}
Vtemp=(tmpAD*3300.0)/4096;
Rtemp =vtemp/(3300.0-Vtemp)*10000.0;
temp =(1/(1og(Rtemp/10000.0)/3950.0+(1/(273.15 + 25))))- 273.15 + 0.5;
return temp;
}
//函数名称:Regression MCU Temp
//功能概要:将读到的mcu温度AD值转换为实际温度
//参数说明:mcu_temp_AD:通过adc_read函数得到的AD值
//函数返回:实际温度值
float Regression ICU Temp(uint16_t mcu_temp_AD)
{
float mcu temp result;
mcu_temp_result=(float)(55+(100*((f1oat)(mcu_temp_AD)-AD_CAL1))/(AD_CAL2-AD_CAL1);
return mcu_temp_result;
}为了使温度参数变化得跟明显,所以使用了吹风机来环境温度变化,当然最后也是成功获得实验数据结果:


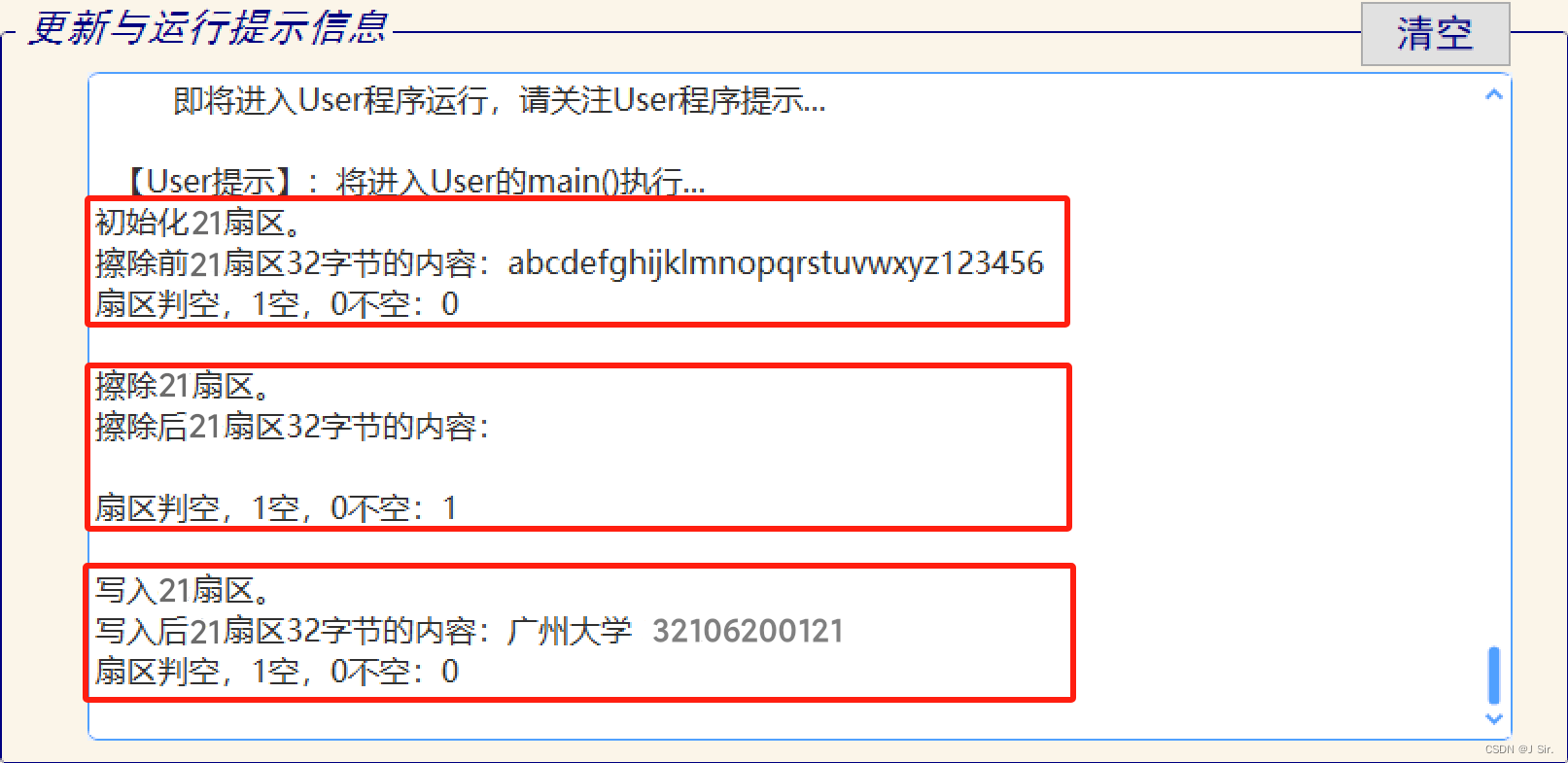
3. 用实验验证,对于有数据的某扇区,如果没有擦除(Flash_erase),可否写入新数据?注:扇区号为学号 后2位,数据文本中要有姓名。
首先向 flash 中写入并读出数据:
//主函数
int main(void)
{
uint8_t mK1[32]; //按照逻辑读方式从指定flash区域中读取的数据
uint8_t result; //判断扇区是否为空标识
uint16_t sector = 21U;
//初始化扇区内容
flash_erase(sector);
flash_write(sector,0,32,(uint8_t *) "abcdefghijklmnopqrstuvwxyz1234567890");
printf("初始化%d扇区。\n",sector);
flash_read_logic(mK1,sector,0,32); //从指定扇区读取32个字节到mK1中
printf("擦除前%d扇区32字节的内容:%s\n",sector,mK1);
result = flash_isempty(sector,MCU_SECTORSIZE); // 判断指定扇区是否为空
printf("扇区判空,1空,0不空:%d\n",result);
//擦除指定扇区
flash_erase(sector);
printf("\n擦除%d扇区。\n",sector);
flash_read_logic(mK1,sector,0,32); //从指定扇区读取32个字节到mK1中
printf("擦除后%d扇区32字节的内容:%s\n",sector,mK1);
result = flash_isempty(sector,MCU_SECTORSIZE); // 判断指定扇区是否为空
printf("扇区判空,1空,0不空:%d\n",result);
//向指定扇区第0偏移地址开始写32个字节数据
flash_write(sector,0,32,(uint8_t *) "广州大学 32106200121");
printf("\n写入%d扇区。\n",sector);
flash_read_logic(mK1,sector,0,32); //从指定扇区读取32个字节到mK1中
printf("写入后%d扇区32字节的内容:%s\n",sector,mK1);
result = flash_isempty(sector,MCU_SECTORSIZE); // 判断指定扇区是否为空
printf("扇区判空,1空,0不空:%d\n",result);
for(;;) //for(;;)(开头)
{
}
}结果写入并读出数据对应我学号后两位的21扇区: 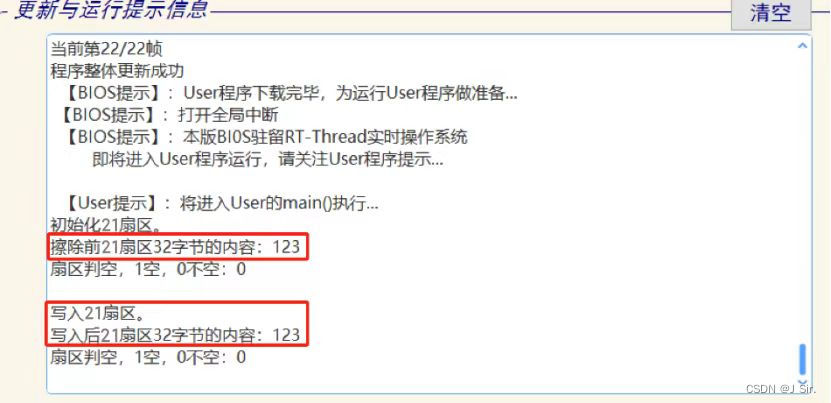
已将flash_write函数中擦除语句删除后的结果:(包括了自己的学号32106200121)
//主函数
int main(void)
{
uint8_t mK1[32]; //按照逻辑读方式从指定flash区域中读取的数据
uint8_t result; //判断扇区是否为空标识
uint16_t sector = 21U;
//初始化扇区内容
flash_erase(sector);
flash_write(sector,0,32,(uint8_t *) "123");
printf("初始化%d扇区。\n",sector);
flash_read_logic(mK1,sector,0,32); //从指定扇区读取32个字节到mK1中
printf("擦除前%d扇区32字节的内容:%s\n",sector,mK1);
result = flash_isempty(sector,MCU_SECTORSIZE); // 判断指定扇区是否为空
printf("扇区判空,1空,0不空:%d\n",result);
//擦除指定扇区
/*flash_erase(sector);
printf("\n擦除%d扇区。\n",sector);
flash_read_logic(mK1,sector,0,32); //从指定扇区读取32个字节到mK1中
printf("擦除后%d扇区32字节的内容:%s\n",sector,mK1);
result = flash_isempty(sector,MCU_SECTORSIZE); // 判断指定扇区是否为空
printf("扇区判空,1空,0不空:%d\n",result);*/
//向指定扇区第0偏移地址开始写32个字节数据
flash_write(sector,0,32,(uint8_t *) "广州大学 32106200121");
printf("\n写入%d扇区。\n",sector);
flash_read_logic(mK1,sector,0,32); //从指定扇区读取32个字节到mK1中
printf("写入后%d扇区32字节的内容:%s\n",sector,mK1);
result = flash_isempty(sector,MCU_SECTORSIZE); // 判断指定扇区是否为空
printf("扇区判空,1空,0不空:%d\n",result);
for(;;) //for(;;)(开头)
{
}
}















 438
438

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









