






参考code:https://github.com/hustvl/YOLOP
01测试
python tools/demo.py --source inference/images 测试图片:--source 图片路径 (或存放图片的文件夹路径) 测试视频:--source 视频路径 (或存放视频的文件夹路径) 相机实时:--source 0


02demo
修改第173行调用GPU


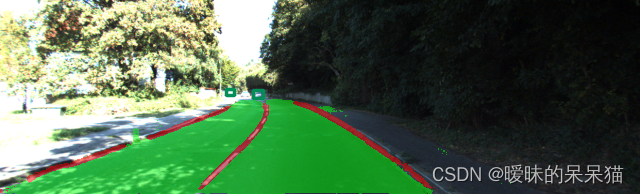
03测试kitti_road数据
IndexError: boolean index did not match indexed array along dimension 0; dimension is 375 but corresponding boolean dimension is 194
解决:在demo.py的131行加入
img_det = cv2.resize(img_det, (da_seg_mask.shape[1], da_seg_mask.shape[0]), interpolation=cv2.INTER_AREA)
在plot.py的60行删掉
# img = cv2.resize(img, (1280,720), interpolation=cv2.INTER_LINEAR)
测试result:

04写在最后
别在秋招池子里泡着,















 1607
1607











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









