






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
无人机群在三维环境中的碰撞与静态避障研究
无人机群在三维环境中的碰撞和静态避障仿真旨在模拟多架无人机在复杂的三维空间中安全飞行的情景。这种仿真涉及到多个方面,包括无人机的动力学行为、环境地形的建模、碰撞检测与避免策略等。该仿真会对无人机的动力学模型进行建模,以准确描述无人机的运动特性,包括位置、速度和加速度等。然后,仿真环境将三维空间划分为网格或连续空间,并在其中标识出障碍物、目标位置以及无人机的起始位置。在仿真过程中,无人机将根据其动力学模型和控制算法进行运动规划,以达到预定的目标位置。同时,系统会实时监测无人机之间以及无人机与环境障碍物之间的距离,进行碰撞检测。通过这种仿真,可以评估不同的碰撞检测与避免策略在多无人机场景下的性能表现,并优化无人机飞行的安全性和效率。这种仿真在无人机系统设计、飞行控制算法验证以及无人机应用场景的规划与优化等方面具有重要意义。
一、无人机集群控制技术基础
-
集群定义与架构
无人机集群是由多架无人机组成的分布式或混合式协同系统,通过网络技术实现信息交互与任务协调,具备去中心化、鲁棒性和自组织特性。其控制结构包括:- 分布式架构:每架无人机基于局部信息(如邻近无人机位置、速度)自主决策,降低中央计算压力,增强系统容错性。
- 混合式架构:结合集中式任务分配与分布式路径规划,适用于复杂场景下的动态调整。
-
核心技术组件
- 通信技术:采用轻量级协议(如UDP)传递位置、速度及任务状态,支持局部信息共享。
- 路径规划:结合全局规划(A*算法、3D体素JPS)与局部动态调整(如人工势场法、粒子群优化)。
- 碰撞避免:集成几何法、距离场法及深度学习模型,实现实时避障。
二、三维碰撞检测与避免方法
-
碰撞检测技术
- 网格化空间划分:将三维空间划分为规则网格(如GeoSOT-3D),通过网格代码比对快速检测潜在碰撞区域,降低计算复杂度。
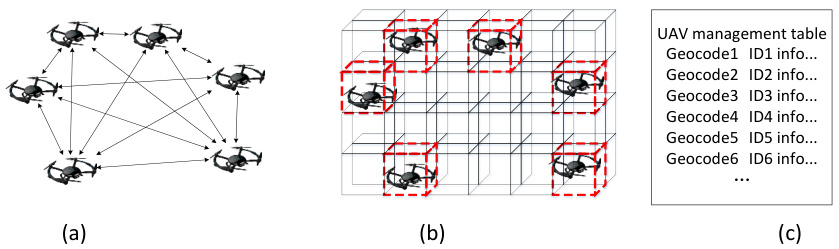
- 包围盒与距离场法:采用球体或立方体包围盒简化障碍物模型,结合距离场实时计算无人机与障碍物的最小安全距离。
- 激光雷达辅助:通过三维点云数据构建环境模型,提升障碍物定位精度。
- 网格化空间划分:将三维空间划分为规则网格(如GeoSOT-3D),通过网格代码比对快速检测潜在碰撞区域,降低计算复杂度。
-
避障算法分类
- 模型驱动法:
- 人工势场法(APF) :引入伪指数函数优化势场,避免局部极小值问题,并通过摩擦阻尼抑制轨迹震荡。
- 速度障碍法(VO) :结合B样条曲线生成平滑路径,适应动态障碍物与运动学约束。
- 数据驱动法:
- 深度强化学习(DRL) :通过DDPG算法实现端到端避障决策,优化轨迹平滑性与避障成功率(实验验证成功率>90%)。
- 视觉感知模型:基于YOLOv10与双目视觉实现障碍物三维定位,提升复杂光照与遮挡场景下的检测鲁棒性。
三、静态障碍物建模与避障策略
-
静态障碍物建模方法
- 几何包络法:将障碍物简化为圆形或矩形区域,通过函数描述其空间范围(如
 ,降低计算复杂度。
,降低计算复杂度。 - 超二次曲面方程:结合几何模型与数学方程(如椭球体、圆柱体),实现高精度碰撞检测与安全空间建模。
- 几何包络法:将障碍物简化为圆形或矩形区域,通过函数描述其空间范围(如
-
避障策略优化
- 多级优先级控制:区分编队维护与避障任务优先级,通过Lyapunov稳定性分析确保系统收敛性。
- 自适应半径调整:根据障碍物密度动态调整避障半径,平衡避障效率与安全性(实验验证最小安全距离>20m)。
四、动态/静态混合避障算法研究
-
混合场景挑战
- 动态障碍物速度预测:利用贝叶斯填充滤波器(BOF)与光流算法估计障碍物运动趋势,优化能量消耗路径。
- 分布式协同避障:通过心跳信息过滤与局部规则(分离、对齐、聚合)实现群体级避障,避免通信拥塞。
-
典型算法案例
- 改进人工势场法:融入伪指数函数与摩擦阻力,支持大规模集群(100架以上)在动态威胁环境下的编队重构。
- 多智能体强化学习(MADRL) :结合模型预测控制(MPC)与MADDPG算法,提升动态障碍场景下的训练效率与实时性。
五、仿真平台与实验验证
-
主流仿真工具
- MATLAB/Simulink:支持3D路径规划算法验证(如CTCM算法),适用于多无人机协同仿真。
- Unity3D:通过物理引擎构建高精度虚拟环境,支持动态障碍物生成与实时观测(如无人直升机避障仿真)。
- AirSim:结合深度图像与激光雷达模拟,验证DRL算法在未知三维环境中的适应性。
-
典型实验案例
- 复杂障碍场景测试:在U型、门型障碍物环境中,验证VFAOAR算法的最小机间距离(50.77m)与避障成功率(>95%)。
- 三维动态环境验证:基于CATIA二次开发平台,实现城市低空环境中的多无人机协同避障,平均飞行速度2m/s,任务高度误差<0.5m。
六、未来研究方向与挑战
-
关键技术瓶颈
- 通信可靠性:需解决密集场景下的信号干扰与延迟问题,探索容错机制与重传策略。
- 计算效率:优化深度学习模型的轻量化部署(如模型剪枝、量化),适应边缘计算资源限制。
-
前沿探索方向
- 数字孪生技术:通过虚实交互生成海量训练数据,提升避障策略的泛化能力。
- 多模态传感器融合:结合LiDAR、视觉与IMU数据,增强复杂环境下的感知冗余。
七、结论
无人机群在三维环境中的碰撞与静态避障研究需综合多学科技术,从分布式控制架构到混合避障算法,从传统几何建模到深度学习优化,其核心在于平衡效率、安全性与实时性。未来,随着数字孪生、边缘计算等技术的成熟,无人机群将在城市物流、灾害救援等领域实现更复杂的协同任务。
📚2 运行结果
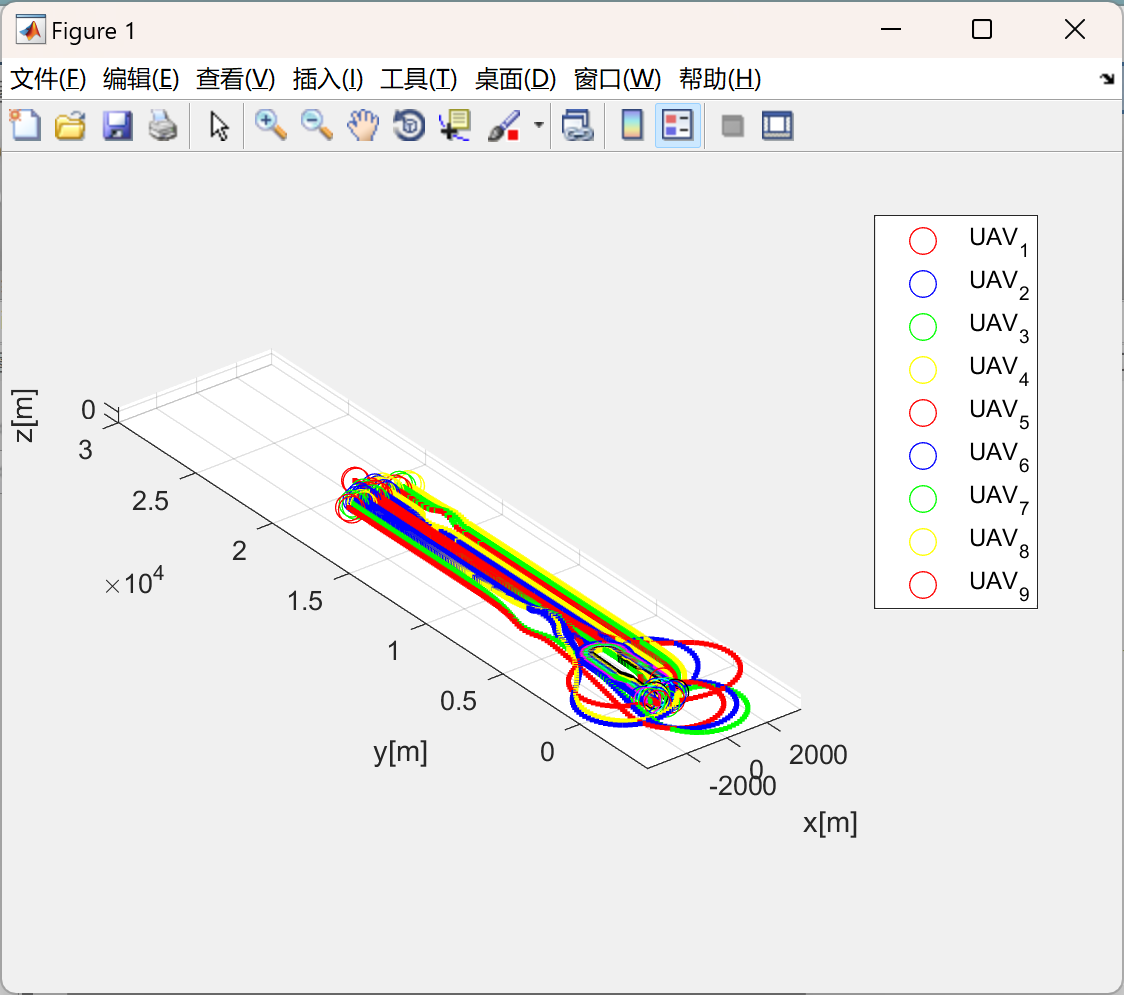
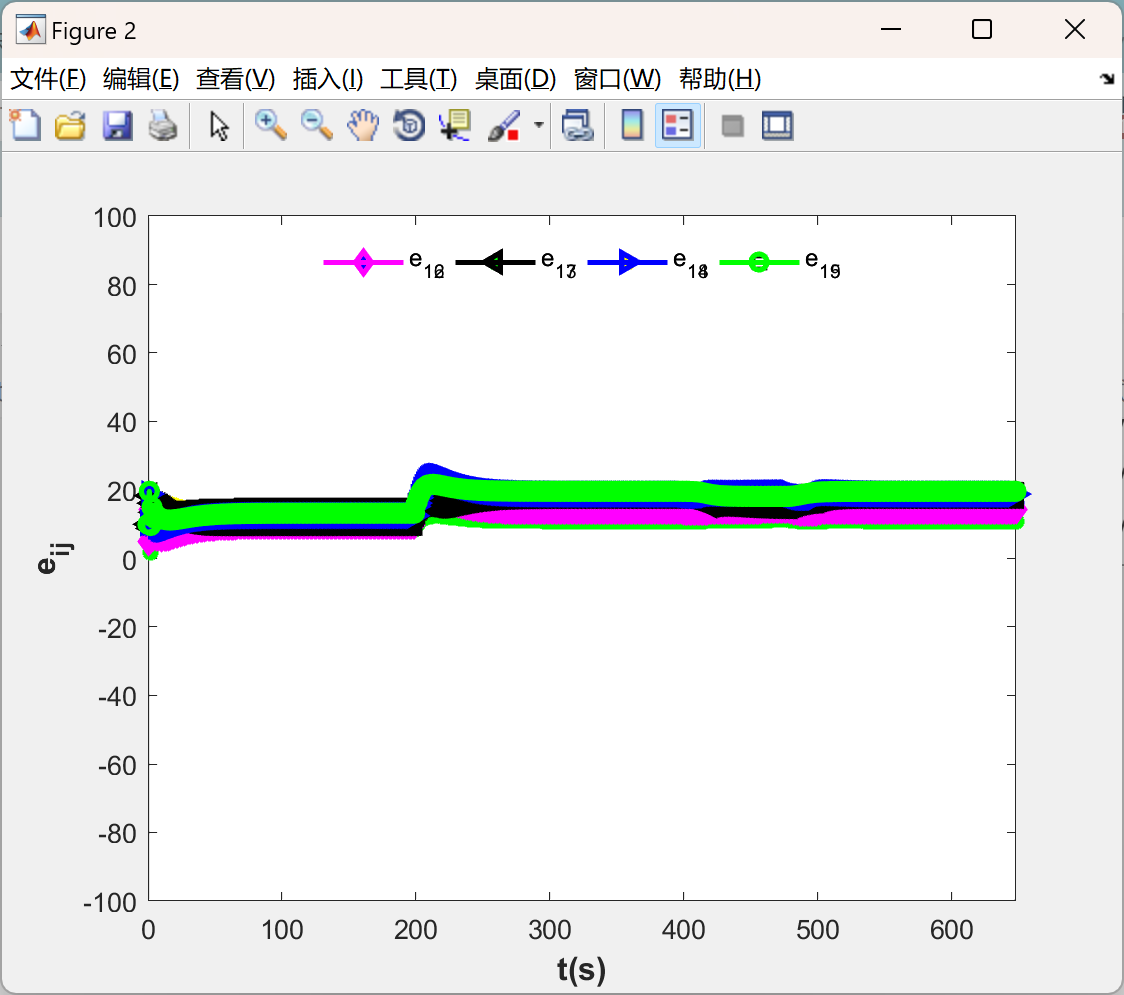

主函数部分代码:
clc
clear all;
T=[200 0 500;%Leader %初始位置坐标矩阵
-300 -200 300;%1
200 -500 200;%2
0 -600 100;%3
0 -800 100;%4
0 -450 80;%5
100 250 0;%6
50 200 0;%7
20 100 0;%8
40 50 0;%9
160 0 0;%10
80 -130 0;%11
100 -60 0;%12
200 -500 0;%13
100 -400 0;%14
0 -300 0;%15
-100 -200 0;%16
-200 -100 0;%17
-300 0 0;%18
-300 300 0;%19
-400 400 0];%20
plot3(T(1,1),T(1,2),T(1,3),'o','Markersize',10,'color','r');%画出初始位置
% text(T(1,1)-5,T(1,2)-5,T(1,3)-5,'UAV_1');%标注名称
hold on
plot3(T(2,1),T(2,2),T(2,3),'o','Markersize',10,'color','b');
hold on
plot3(T(3,1),T(3,2),T(3,3),'o','Markersize',10,'color','g');
hold on
plot3(T(4,1),T(4,2),T(4,3),'o','Markersize',10,'color','y');
hold on
plot3(T(5,1),T(5,2),T(5,3),'o','Markersize',10,'color','r');%画出初始位置
hold on
plot3(T(6,1),T(6,2),T(6,3),'o','Markersize',10,'color','b');
hold on
plot3(T(7,1),T(7,2),T(7,3),'o','Markersize',10,'color','g');
hold on
plot3(T(8,1),T(8,2),T(8,3),'o','Markersize',10,'color','y');
hold on
plot3(T(9,1),T(9,2),T(9,3),'o','Markersize',10,'color','r');%画出初始位置
hold on
plot3(T(10,1),T(10,2),T(10,3),'o','Markersize',10,'color','b');
hold on
plot3(T(11,1),T(11,2),T(11,3),'o','Markersize',10,'color','g');
hold on
plot3(T(12,1),T(12,2),T(12,3),'o','Markersize',10,'color','y');
hold on
plot3(T(13,1),T(13,2),T(13,3),'o','Markersize',10,'color','r');%画出初始位置
hold on
plot3(T(14,1),T(14,2),T(14,3),'o','Markersize',10,'color','b');
hold on
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]董昌. 科技撑腰,增产增收底气足[N]. 河北日报,2024-05-09(011).
[2]张宇宸,段海滨,魏晨.基于深度强化学习的无人机集群数字孪生编队避障[J/OL].工程科学学报:1-12[2024-05-11].http://kns.cnki.net/kcms/detail/10.1297.TF.20240412.1109.003.html.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









