







闲扯:
最近又变得有时间了。回忆起了去年做的这个小东西,还有很多可以改进的地方,这几天就认真研究了一下,有所感悟,也确实改进升级了一些,完整代码在最下方。(后续好像可以初步做出一个小的gui来实现你给定杆长,就可以生成运动动画的效果,这是后话,最近有时间也会找机会做出来发布)
回顾:
本文紧接上一篇文章:MATLAB之机械原理之解析法之直角坐标法之曲柄摇杆机构运动仿真设计_matlab怎么表示两杆间夹角固定-CSDN博客
是对上文出现的一些错误进行纠正和一些改进。
如果您对此有兴趣,可以先看看上一篇文章后再阅读这篇文章,可能会更好理解,感谢。
发现错误:
首先上文说到:
上述代码通过设定a,b两个未知数,来记录一个位置中的C的位置信息,使用solve来进行求解,后将a,b的信息依次带入C的位移矩阵之中。需要注意的是,也是困扰了我很久的是,联立方程进行求解时,得到a,b会有多解的情况,数学上理解是因为有平方存在,求解时会有正和负两种情况,在机械四杆机构中理解,则是会出现BC杆位于AD下方的情况。
这个其实是没问题的,但是我误以为得到的解就是一组一组排好队了的,只要选择第一行,就是第一组解,选第二行就是第二组解,这似乎在曲柄摇杆机构中是使用的,但是放到双曲柄机构中就会出现动画跳跃不连续的情况了。
实际上,利用matlab中的solve函数求解方程,得到多组解的情况,解的信息贮存在矩阵中是按一定规律排序的(似乎是升序,但不满足我们所要求的分组),也就是说上文贮存c点横坐标信息的A矩阵,和组成c点纵坐标信息的B矩阵(都是2×126的大小),除了A,B矩阵相同位置的解信息是对应的,例如A矩阵第2行第三列的横坐标信息对应着B矩阵第2行第三列的纵坐标信息。
其他什么都说明不了,可能A矩阵第一行的前100列都是第一组解的信息,但是第一行101列到125列都是第二组解的信息了,而第一行的126列又是第一组信息了,所以要先对贮存c的坐标信息的A、B矩阵进行预处理,让其变成第一行是一组解,第二行是另一种解,真正实现精确分类。
纠正措施:
为了纠正这个错误,我苦思冥想了2天,试了好几种方法,就在今天下午终于找到了最最合适的方法(不辛苦命苦)。
也分享一下我最开始的一些思路,如果大家对我的这个问题有兴趣,可以帮大家开拓思路,
如果对错误不成熟的思路没兴趣,也可以直接看思路三,我的最终处理方法:
思路1:
我最开始是想,既然运动动画要连续,其实每个精确点之间的距离其实不大,例如每次运动我们设置转动pi/50,其实也就是3.6°,假设边长是130,其实每次转动的幅度很小了,所以如果是同一组坐标,变化量应该不大,如果出现了突变,一下加了很多,或者少了很多,那不就是说明数据不是同一组,就编写个if函数检测,用diff函数计算这一列的值减去前一列的值再取绝对值,如果差值大过阈值,就把这列的第一行第二行换位,如果不超过阈值就说明是同一组的,不换位保持不变。
我也初步写出了程序,也有一点效果,但是在后续测试中发现几个问题,首先阈值不好确定,不方便后续如果要模块化做一个自动生成器。还有就是,有时候虽然是不同组数据,但其实数值很接近。例如某一列的第一行是180.96,第二行是179.69,就差一点点,根本检测不出来,然后一次检测错误,后续检测更错了,只得先放弃这个思路。(不辛苦命苦+1)
思路2:
我后面又想到,在机构运动过程中(默认曲柄初始角度60°,曲柄逆时针转动),c点的横坐标是不是先减小,再增大,再减小。是不是可以利用单调性来求解呢,同样利用diff函数,计算矩阵前后素质之间的差,大于0的话就说明单增,小于0就单减。
但是,先减后增再减的规律是我默认曲柄初始角度60°的情况下得出来的,而且曲柄摇杆机构也不太满足这个情况,无奈再次放弃这个思路。(不辛苦命苦+2)
思路3:
开始到正题了,主要是用到了机械原理中的错位不连续原理。刚刚开始学这个原理时候也只是用来画图时候检验机构有没有画错,但就在刚刚突然想起来这个原理,在这一样适用。
何为错位不连续原理呢,太官方的话我就不解释了,可以查阅机械原理这本书或者网上查询一下。我这里用口语简单描述一下其判断方法。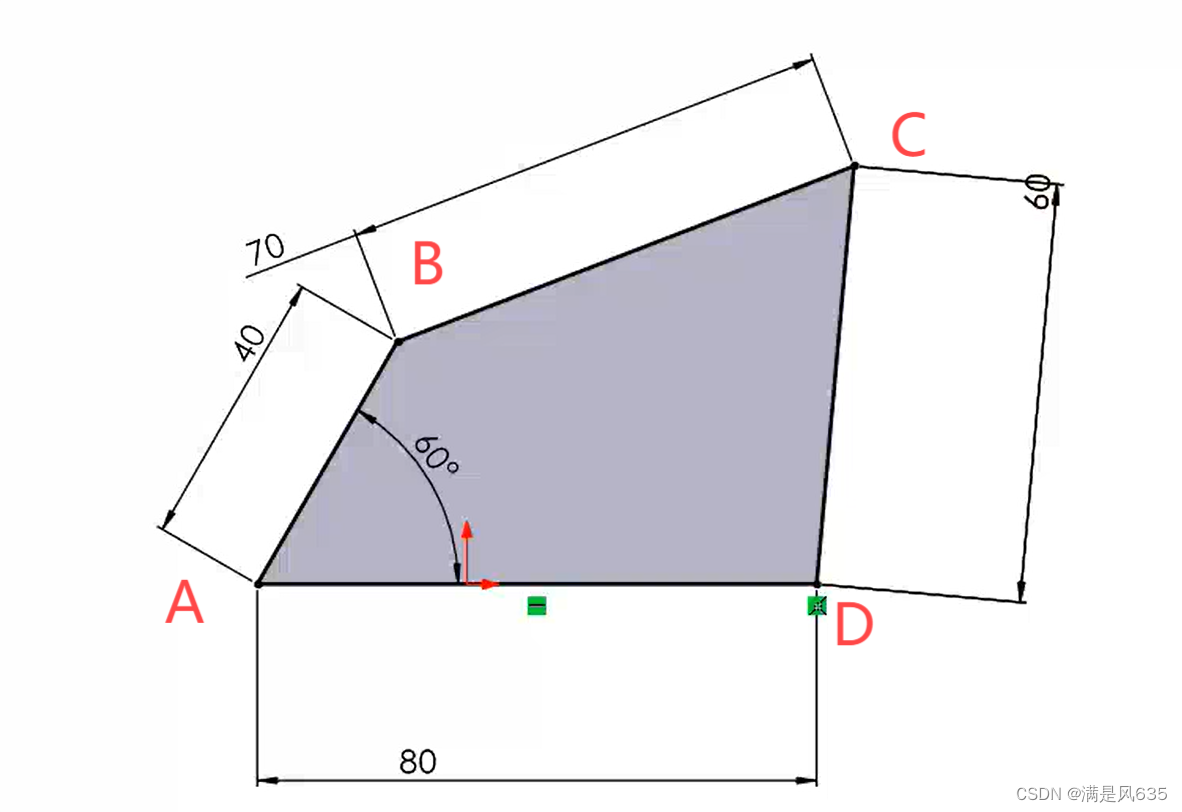
仔细观察上图,以A点为坐标原点建系,则D的坐标(80,0),而AB杆作为曲柄逆时针运动为原动件,在这个过程中,你假设有一条线,依次穿过B点,C点,D点,无论对应运动到哪个位置,这条线都是顺时针方向(大致效果如下)。
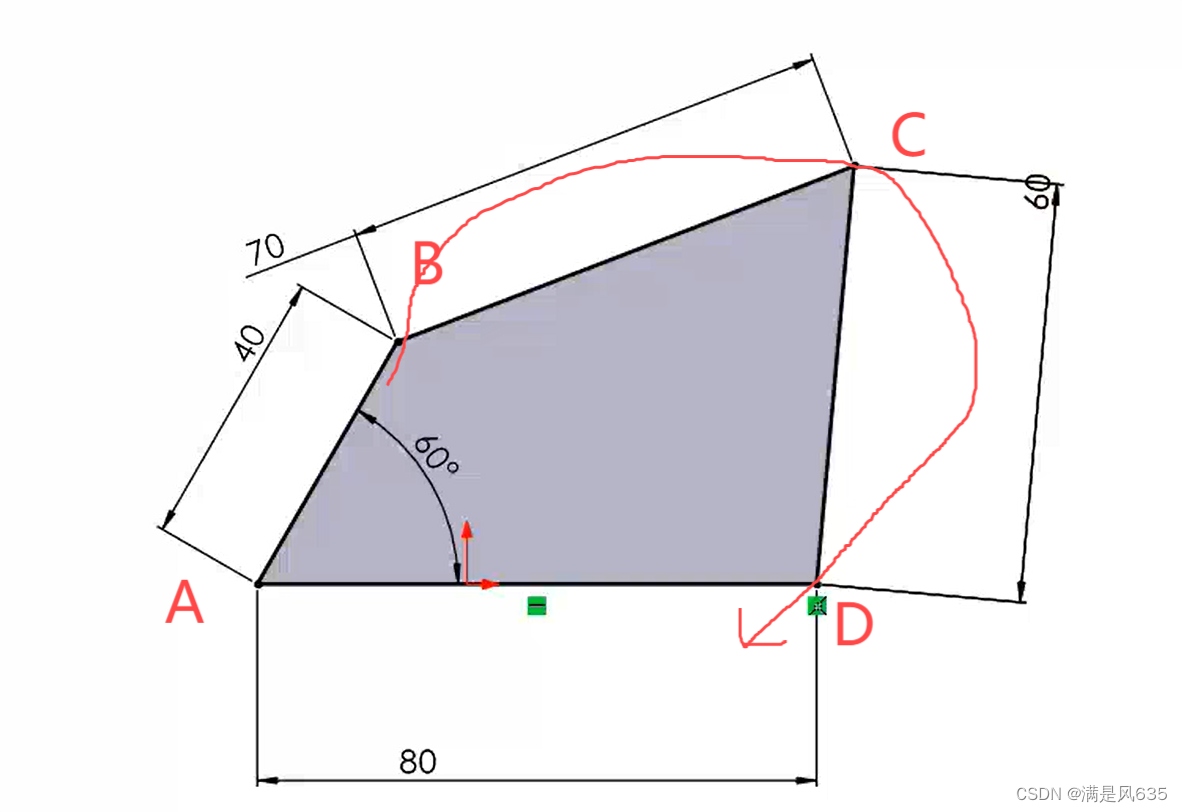
换言之,就是在运动过程中,B点始终在杆CD的一侧(上图对应着始终在杆cd左侧的情况,视角沿着矢量dc看),要么一直在左边,要么一直在右边。结合下列视频观察可能会比较明了。
机构运动1
仔细观察上方视频的机构运动,重点留心B点相对杆cd的位置,不难发现,在整个运动过程中,B点始终在杆cd的左侧。
机构运动2
仔细观察上方视频的机构运动,重点留心B点相对杆cd的位置,不难发现,在整个运动过程中,B点始终在杆cd的右侧。
上边两个视频也就是有两组解对应的运动情况。
修改程序:
有了这个思路,便开始着手改进程序,最初版本的程序一样可以在上一篇文章中找到,本次的代码其实和其大体一致,核心原理还是机械原理的直角坐标法。但是之前的代码对得到的数据没有处理直接带入使用,容易出现错误情况,本次代码改进好了这一问题。
具体改进的方法是用上了矢量叉积的知识点,如果感兴趣可以听我给你分析一下,(不感兴趣也可以直接复制下面代码运行就好了)。
如果有一条线(杆cd),和一个点(b点),只要确保b点一直在杆cd的一侧,在同一侧就是同一组解。而b点始终在杆cd一侧,构建矢量bd,和矢量cd,用矢量bd叉积矢量cd则始终为正或者始终为负(为正可以则b点一直在杆cd右侧,为负则b点一直在杆cd左侧).
那我们可以构建两个矢量,一个是vq1,矢量bd;一个是vq2,矢量cd;matlab中矢量叉积函数是cross(),这个函数是对三维矢量进行矢量叉积运算的,所以我们也把vq1,vq2后面加一个0,方便运算。具体操作如下(此处代码只是为了介绍原理,想运行程序不用理会这处代码,直接复制后方完整代码就好):
for q=1:1:num1
vq1=[Xb(q)-Xd,Yb(q)-Yd,0]; %矢量bd,后面填个零方便计算
vq2=[A(1,q)-Xd,B(1,q)-Yd,0]; %矢量cd,后面填个零方便计算
result=cross(vq1,vq2); %cross叉乘函数,得到一个1×3的矩阵,
if result(1,3)>0 %如果叉乘大于0,也就是说是b点在cd右侧的这组解
%就把这组解放到第二行去,这样第二行都是b点在cd右侧的这组解,第一行就都是另一种解
A([1, 2],q)=A([2,1],q);
B([1, 2],q)=B([2,1],q);
end
%将处理好的A、B矩阵信息带入进c点坐标中,A(1,q)的话就是选第一行的那组解,A(2,q)的话就是选第二行的那组解
Xc(q)=real(A(1,q));
Yc(q)=real(B(1,q));
end矢量叉积得到的结果为一个1×3的矩阵result,重点就看第三个数据,如果这个数据大于0,则说明b点在杆cd右侧,if函数满足条件,就把这个解统一放到第二行去,循环遍历后,就可以将所有b点在杆cd右侧的解都放到第二行去,第一行就都是b点在杆cd左侧的那组解。实现了对解按行分类的目的了。
确实是新手,上一篇文章的代码是直接复制在内容上了,这次学乖了(不辛苦命苦+3),详细代码都在下面并配了较为详细的注释,复制全文进matlab中运行就可以了,如果想修改铰链四杆的参数,需要提前规划好铰链四杆机构各个杆长,然后套进程序中就行。
备注:目前程序只适用曲柄摇杆机构和双曲柄机构,且杆ab为原动件。
% 直角坐标法
format long %设置数据格式,高精度
syms a b ; %定义两个变量,a,b
Wa=pi/50; %设置曲柄转速,弧度制
num1=ceil(2*pi/Wa); %根据曲柄转速,则计算转一周有多少精确点
% 设置杆长和a、d点坐标信息
Xa=0;
Ya=0;
Xd=60.5;
Yd=0;
Lab=80.896;
Lbc=230.5664;
Lcd=221.8;
% 提前为b、c、以及变量A、B、M定义好矩阵大小,都是零矩阵
Xb=zeros(1,num1);
Yb=zeros(1,num1);
Xc=zeros(1,num1);
Yc=zeros(1,num1);
A=zeros(2,num1);
B=zeros(2,num1);
M=zeros(1,num1);
theatA=pi/3; %设置初始曲柄与x轴角度
f=1:1:num1; %定义f为递增矩阵,增量为1
% M是用来贮存各个精确点角度信息的
M(f)=theatA+Wa*(f-1);
% 计算b点在各个精确点的坐标信息,通过for循环,将各个信息带入进提前准备好的零矩阵中
for i=1:1:num1
Xb(i)=Xa+Lab*cos(M(i));
Yb(i)=Ya+Lab*sin(M(i));
end
% 通过bc杆已知和cd杆已知还有d坐标已知,列方程求c的坐标信息
%A矩阵贮存c点的横坐标信息,B矩阵贮存c点的纵坐标信息,
%这里通过for循环,是计算每个精确点的c的坐标信息,并将其带入提前准备好的A、B两个零矩阵中
for q=1:1:num1
eq1=(a-Xd).^2+(b-Yd).^2-Lcd.^2==0; %方程组1,利用dc杆已知列的方程
eq2=(a-Xb(q)).^2+(b-Yb(q)).^2-Lbc.^2==0; %方程组2,利用bc杆已知列的方程
[A(:,q),B(:,q)]=solve([eq1,eq2],[a,b]); %求解方程组,并将数据带入A、B矩阵中
end
%到这为止,以及得到了b点的坐标信息,还有c点的坐标信息,(a,d坐标信息也已知)
% 但值得注意的是,上述循环中求解c的坐标会出现多解的情况
% 在数学上解释是因为这是二元二次方程求解,会有多解
% 在机械四杆机构中解释是因为是有两个可行域的(也就是给你这四个杆,是可以有两种装法,也就有两种运动情况)
% 所以还需对A、B这两个矩阵进行处理,最后得到合适的坐标信息,确定出c点坐标
%A、B矩阵都是2×num1大小的矩阵,我最开始以为,A、B的第一行数据就是一组解,第二行数据是第二组解
%这在曲柄摇杆机构中确实适用好像,但在双曲柄机构中就会有问题,运动动画会有跳跃现象,不连续
%利用机构运动的错位不连续原理,可以对解进行分类,分成正确的两组
%错位不连续(机械原理中的知识点),说人话就是,四杆机构在一个可行域内运动时候,b点一直只会在cd杆的一侧(要么左边,要么右边)
%左边是一组解,右边的情况也是一组解,如果b点在cd杆左侧,则矢量bd叉乘矢量cd就小于0,反之大于0的话,b点就在cd杆右侧
for q=1:1:num1
vq1=[Xb(q)-Xd,Yb(q)-Yd,0]; %矢量bd,后面填个零方便计算
vq2=[A(1,q)-Xd,B(1,q)-Yd,0]; %矢量cd,后面填个零方便计算
result=cross(vq1,vq2); %cross叉乘函数,得到一个1×3的矩阵,
if result(1,3)>0 %如果叉乘大于0,也就是说是b点在cd右侧的这组解
%就把这组解放到第二行去,这样第二行都是b点在cd右侧的这组解,第一行就都是另一种解
A([1, 2],q)=A([2,1],q);
B([1, 2],q)=B([2,1],q);
end
%将处理好的A、B矩阵信息带入进c点坐标中,A(1,q)的话就是选第一行的那组解,A(2,q)的话就是选第二行的那组解
Xc(q)=real(A(1,q));
Yc(q)=real(B(1,q));
end
% 正常绘图
v=moviein(100);
for w=1:1:num1
clf;
hold on
plot(Xa,Ya,'*r',Xb(w),Yb(w),'*g')
line([Xa,Xb(w)],[Ya ,Yb(w)]);
plot(Xb(w),Yb(w),'*',Xc(w),Yc(w),'*')
line([Xb(w),Xc(w)],[Yb(w),Yc(w)]);
plot(Xd,Yd,'*r',Xc(w),Yc(w),'*g')
line([Xd,Xc(w)],[Yd ,Yc(w)]);
axis([-(ceil(Xd+Lcd)+10) ceil(Xd+Lcd)+10 -(ceil(Xd+Lcd)+10) ceil(Xd+Lcd)+10 ])
v(w)=getframe;
end
grid
movie(v)
hold off
唠叨几句:
刚刚结束考研事宜,有些清闲,想起来这个小东西,这几天都在思考改进让其更加高效准确。这次改进确实让我收获很多,虽然看似只是多了一步对数据进行处理分组后再带入画图,但就是这一步也有很多知识点,错位不连续,矩阵运算,矢量叉积等等,也困扰了我两天,所幸最后有了一个较为满意的效果,没让我大败而归。
最后再总结一下:
其实这次改进就是修复了上一篇文章中的小bug,更为合理了,更有理论支撑了,其主要就是结合了机械原理的错位不连续原理和矢量叉积原理。本文是对上一篇文章的补充改进,如果感兴趣,希望能够先阅读上一篇文章后,(上方有链接)再来思考这篇文章,我觉得还是很有意思的,也可以提前在b站上温习一下矢量叉积和错位不连续的知识点方便理解。
后续应该会继续完成之前的小目标,通过matlab的gui设计成一个曲柄摇杆生成器,这次改进其实也已经向这个目标迈出了坚实的一步。若有成果,后续会继续发布。
本人学习matlab时间不长,也并非专业计算机编程专业,纯属兴趣爱好,若有人对此感兴趣,有任何看法或建议,都很欢迎在评论区留言讨论。你能看到这,我已经万分感谢。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









