







一、M74HC595简介
M74HC595器件是采用硅栅C2MOS技术制作的具有输出锁存器(3态)的高速CMOS 8位移寄存器。
该设备包含一个8位串行进、并行出移位寄存器,它提供一个8位d型存储寄存器。存储寄存器有8个3状态输出。为移位寄存器和存储寄存器都提供了单独的时钟。
移位寄存器有直接覆盖清除,串行输入和串行输出(标准)引脚级联。移位寄存器和存储寄存器都使用正边缘触发时钟。如果两个时钟连接在一起,移位寄存器状态将始终是存储寄存器前面的一个时钟脉冲。
特性:
- 高速:在Vcc = 6V时,fMAx = 59mhz(典型)
- 低功耗:Icc = 4 μA (max)
- 工作电压范围宽:Vcc (opr.) = 2 V至6 V
1.M74HC595设备操作原理图:
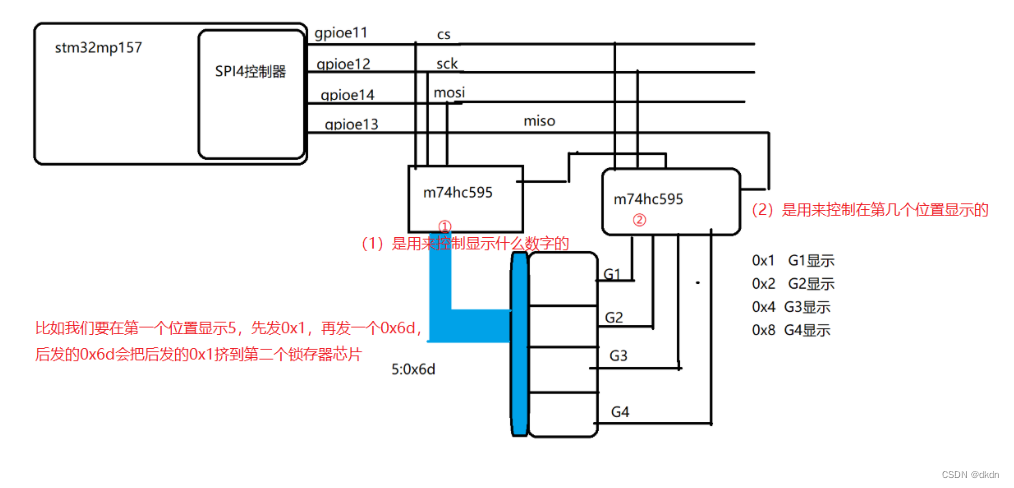
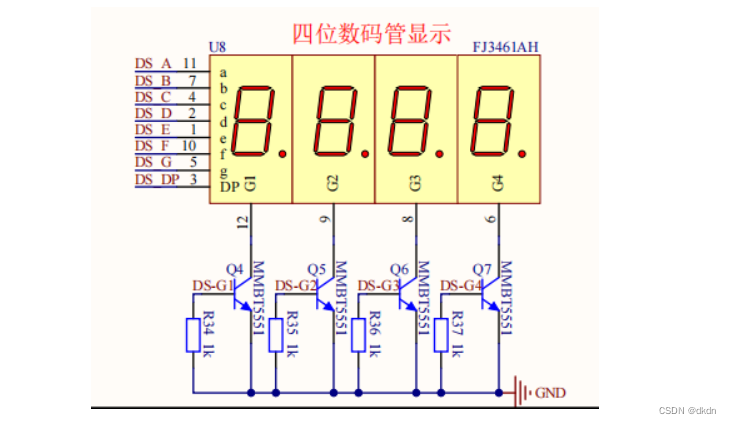
2. 开发板原理图
二、 添加设备树的节点
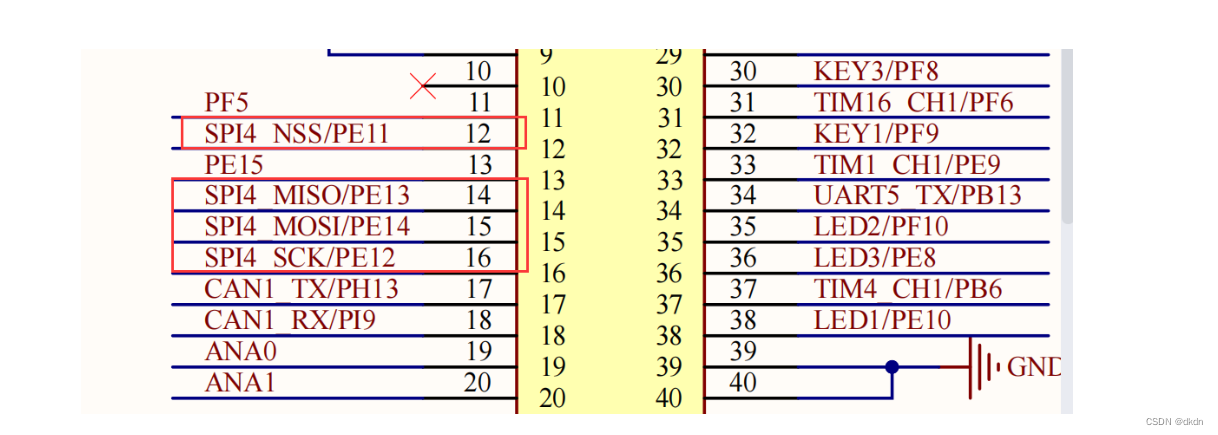
1.设置引脚
首先设置spi引脚的复用功能,找到 spi4_pins_b 节点:
vi stm32mp15-pinctrl.dtsi
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-tndfKFsg-1662622887640)(图片/1662616736518.png)]](https://img-blog.csdnimg.cn/e3d81ed3693f4fc9af11743b0f5b3a04.png)
2. 找出控制器的设备树
stm32mp151.dtsi
spi4: spi@44005000 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "st,stm32h7-spi";
reg = <0x44005000 0x400>;
interrupts = <GIC_SPI 84 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&rcc SPI4_K>;
resets = <&rcc SPI4_R>;
dmas = <&dmamux1 83 0x400 0x01>,
<&dmamux1 84 0x400 0x01>;
dma-names = "rx", "tx";
power-domains = <&pd_core>;
status = "disabled";
};
3. 根据内核帮助文档编写自己的设备树
/home/linux/linux-5.10.61/Documentation/devicetree/bindings/i2c/
&spi4{
pinctrl-names = "default", "sleep";
pinctrl-0 = <&spi4_pins_b>;
pinctrl-1 = <&spi4_sleep_pins_b>;
cs-gpios = <&gpioe 11 0>;
status = "okay";
m74hc595@0{
compatible = "m74hc595";
reg = <0>;
spi-max-frequency = <10000000>; //10Mhz
};
};
4. 重新编译设备树
make dtbs
重启开发板
安装驱动
三. 编写M74HC595设备驱动
1.先搭个spi设备驱动框架
#include <linux/init.h>
#include <linux/module.h>
#include <linux/spi/spi.h>
int m74hc595_probe(struct spi_device *spi)
{
printk("%s:%d\n", __func__, __LINE__);
return 0;
}
int m74hc595_remove(struct spi_device *spi)
{
printk("%s:%d\n", __func__, __LINE__);
return 0;
}
struct of_device_id oftable[] = {
{.compatible = "m74hc595"}
{},
};
MODULE_DEVICE_TABLE(of, oftable);
struct spi_driver m74hc595 = {
.probe = m74hc595_probe,
.remove = m74hc595_remove,
.driver = {
.name = "hello",
.of_match_table = oftable,
},
};
module_spi_driver(m74hc595);
MODULE_LICENSE("GPL");
2. 写个Makefile编译一下:
ifeq ($(arch),arm)
KERNELDIR :=/home/linux/linux-5.10.61
CROSS_COMPILE ?=arm-linux-gnueabihf-
else
KERNELDIR :=/lib/modules/$(shell uname -r)/build
CROSS_COMPILE ?=
endif
modname ?=
PWD :=$(shell pwd)
CC :=$(CROSS_COMPILE)gcc
all:
make -C $(KERNELDIR) M=$(PWD) modules
# $(CC) test.c -o test
clean:
make -C $(KERNELDIR) M=$(PWD) clean
# rm test
install:
cp *.ko ~/nfs/rootfs/
# cp test ~/nfs/rootfs/
help:
echo "make arch = arm or x86 modname= dirvers file name"
obj-m:=$(modname).o
linux@ubuntu:~/linu/driver/csdn/M74HC595$ make arch=arm modname=m74hc595
3. 再写字符设备驱动框架
#include <linux/init.h>
#include <linux/module.h>
#include <linux/spi/spi.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <linux/device.h>
#define CNAME "m74hc595"
int major = 0;
int minor = 0;
int count = 1;
dev_t devno;
struct cdev *cdev;
struct class *cls;
struct device *dev;
int m74hc595_open(struct inode *inode, struct file *file)
{
printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);
return 0;
}
long m74hc595_ioctl(struct file *file, unsigned int cmd, unsigned long args)
{
printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);
return 0;
}
int m74hc595_close(struct inode *inode, struct file *file)
{
printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);
return 0;
}
const struct file_operations fops = {
.open = m74hc595_open,
.unlocked_ioctl = m74hc595_ioctl,
.release = m74hc595_close,
};
int m74hc595_probe(struct spi_device *spi)
{
int ret;
// 1.分配对象
cdev = cdev_alloc();
if (cdev == NULL)
{
printk("alloc memory failed\n");
ret = -ENOMEM;
goto ERR1;
}
// 2.初始化对象
cdev_init(cdev, &fops);
// 3.申请设备号
if (major > 0)
{
ret = register_chrdev_region(MKDEV(major, minor), count, CNAME);
if (ret != 0)
{
printk("static:alloc device number failed!\n");
goto ERR2;
}
}
else if (major == 0)
{
ret = alloc_chrdev_region(&devno, 0, 1, CNAME);
if (ret != 0)
{
printk("dynamic:alloc device number failed!\n");
goto ERR2;
}
major = MAJOR(devno);
minor = MINOR(devno);
}
// 4.注册对象
ret = cdev_add(cdev, MKDEV(major, minor), count);
if (ret)
{
printk("add cdev failed\n");
goto ERR3;
}
// 5.向上层提交目录的信息
cls = class_create(THIS_MODULE, "hello");
if (IS_ERR(cls))
{
printk("create class failed\n");
ret = PTR_ERR(cls);
goto ERR4;
}
// 6.向上层提交设备的信息
dev = device_create(cls, NULL, MKDEV(major, minor), NULL, CNAME);
if (IS_ERR(dev))
{
printk("create device failed\n");
ret = PTR_ERR(dev);
goto ERR5;
}
return 0;
ERR5:
class_destroy(cls);
ERR4:
cdev_del(cdev);
ERR3:
unregister_chrdev_region(MKDEV(major, minor), count);
ERR2:
kfree(cdev);
ERR1:
return ret;
}
int m74hc595_remove(struct spi_device *spi)
{
device_destroy(cls,MKDEV(major,minor));
class_destroy(cls);
cdev_del(cdev);
unregister_chrdev_region(MKDEV(major, minor), count);
kfree(cdev);
return 0;
}
struct of_device_id oftable[] = {
{.compatible = "m74hc595"},
{},
};
MODULE_DEVICE_TABLE(of, oftable);
struct spi_driver m74hc595 = {
.probe = m74hc595_probe,
.remove = m74hc595_remove,
.driver = {
.name = "m74hc595",
.of_match_table = oftable,
},
};
module_spi_driver(m74hc595);
MODULE_LICENSE("GPL");
4.封装spi操作结构体
全局变量中添加成员:
struct spi_device *gspi;
u8 code[] = {
0x3f, //0
0x06, //1
0x5b, //2
0x4f, //3
0x66, //4
0x6d, //5
0x7d, //6
0x07, //7
0x7f, //8
0x6f, //9
0x77, //A
0x7c, //b
0x39, //c
0x5e, //d
0x79, //e
0x71, //f
};
u8 which[] = {
0x1, //sg0
0x2, //sg1
0x4, //sg2
0x8, //sg3
};
6.M74HC595写数据
(1)新建头文件,封装头文件命令码
#ifndef __M74HC595_H__
#define __M74HC595_H__
#define SEG_WHICH _IOW('K',0,int)
#define SEG_DAT _IOW('K',1,int)
#endif
(2)添加头文件
#include <linux/uaccess.h> //ioctl
#include "m74hc595.h"
(3)在m74hc595_probe中添加
gspi = spi;
(4)直接调用内核封装好的接口
spi_write(gspi,&which[args],1)
7.字符设备驱动的实现
open
int m74hc595_open(struct inode *inode, struct file *file)
{
printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);
return 0;
}
ioctl
long m74hc595_ioctl(struct file *file, unsigned int cmd, unsigned long args)
{
switch(cmd){
case SEG_WHICH:
spi_write(gspi,&which[args],1);
break;
case SEG_DAT:
spi_write(gspi,&code[args],1);
break;
default: printk("ioctl error\n");break;
}
return 0;
}
close
int m74hc595_close(struct inode *inode, struct file *file)
{
printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);
return 0;
}
四、测试驱动模块
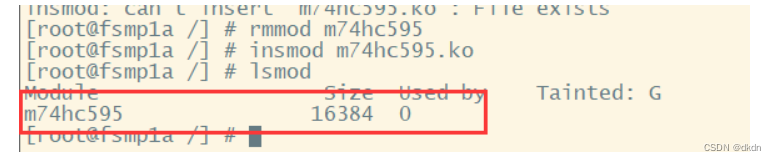
1.加载驱动,查看驱动
insmod
lsmod
2.编写app测试程序
循环打印0-f这16位数
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include "m74hc595.h"
int main(int argc, char const *argv[])
{
int which = 0;
int data = 0;
int fd;
fd = open("/dev/m74hc595",O_RDWR);
if(fd < 0){
perror("open error");
return -1;
}
while (1){
ioctl(fd,SEG_WHICH,which);
which ++;
ioctl(fd,SEG_DAT,data);
data ++;
if(which > 4)which = 0;
if(data > 16)data = 0;
sleep(1);
}
close (fd);
return 0;
}
显示成功














 1757
1757











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









