







摘要:对于上一篇博客(HERE)本文使用
torch.nn算法库,实现线性回归模型。此外,补充了梯度下降算法的底层逻辑。
0、问题描述
假设特征向量为 w w w(设为 [ − 2 , − 3.4 ] T [-2,-3.4]^T [−2,−3.4]T), b = 4.2 b=4.2 b=4.2,样本为 X X X,输出为 y y y,同时加上一点噪声 ϵ \epsilon ϵ:
y = X w + b + ϵ y=Xw+b+\epsilon y=Xw+b+ϵ
后续就是要通过对大量 X , y X,y X,y关系的学习探索 w , b w,b w,b的取值。
1、数据集构建与初始化
定义真实的
w
,
b
w,b
w,b参数,使用d2l算法库生成1000条高斯分布加噪声的随机数据作为训练集:
import numpy as np
import d2l
from d2l import torch as d2l
import torch
from torch.utils import data
true_w = torch.tensor([2, -3.4])
true_b = 4.2
features, labels = d2l.synthetic_data(true_w, true_b, 1000)
构造一个pytorch数据迭代器。每轮次随机选取一定数目的训练数据。这样以后,就可以实现批量化训练:
def load_array(data_arrays, batch_size, is_train=True):
dataset = data.TensorDataset(*data_arrays)
return data.DataLoader(dataset, batch_size, shuffle=is_train)
batch_size=10
data_iter = load_array((features, labels), batch_size)
next(iter(data_iter))
输出如下:
[tensor([[ 1.7709, 0.8762],
[-0.5039, -0.5574],
[ 1.7404, -0.6892],
[ 0.1441, -0.0245],
[-0.9593, -0.8841],
[-1.1815, -0.2625],
[-0.8406, 0.4300],
[-1.4473, 0.7672],
[-1.9178, 0.1378],
[ 1.5084, -0.6536]]),
tensor([[ 4.7558],
[ 5.0965],
[10.0296],
[ 4.5651],
[ 5.2905],
[ 2.7396],
[ 1.0720],
[-1.3107],
[-0.1215],
[ 9.4347]])]
2、定义模型
首先,使用nn模组定义模型、初始化参数:
import torch.nn
# 定义模型
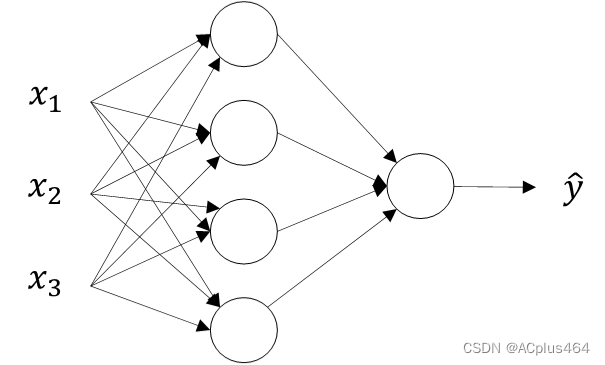
model = nn.Sequential(nn.Linear(2, 1))
nn.Sequencial是可以作为一个容器,封装若干个模型,比如nn.Linear()等。训练时让数据依次通过这些模型。nn.Linear(2, 1)即定义了一个拥有2个特征和1个标签的线性回归网络,也就是全连接层。
# 初始化模型参数
model[0].weight.data.normal_(0, 0.01)
model[0].bias.data.fill_(0)
此处为重点使用方法。
model[0]访问到了第一层网络即定义的Linear层;model[0].weight是该层网络的所有权重形成的tensor。例如,对于nn.Linear(2, 1)而言,它初始weight就是tensor([[-0.0026, -0.0009]], requires_grad=True);.data表示访问权重张量的底层数据(tensor)。例如,对于nn.Linear(2, 1)而言,它初始weight.data就是tensor([[-0.0026, -0.0009]];.fill_(0)对偏置张量的底层数据进行就地(in-place)操作,将所有元素的值填充为0。
# 定义损失函数
loss = nn.MSELoss()
还是使用之前提到的均方误差损失,这也是最常用的损失函数之一。
# 定义优化算法的实现,需要传入2个参数
trainer = torch.optim.SGD(model.parameters(), lr=0.03)
为了定义优化算法,我们传入模型(全部layer)的全部参数和学习率,从而进行随机梯度下降。
3、训练过程
线性回归算法笔记(1)中有所提及,此处基本不变,不赘述。
num_epochs=3
for epoch in range(num_epochs):
for X,y in data_iter:
l = loss(model(X), y)
trainer.zero_grad()
l.backward()
trainer.step()
with torch.no_grad():
l = loss(model(features), labels)
print(f'epoch {epoch+1}, loss {l:f}')
4、补充内容:梯度下降算法的底层逻辑
4.1 基本概念
梯度:对于多元函数 L ( x 1 , x 2 , . . . , x n ) L(x_1,x_2,...,x_n) L(x1,x2,...,xn),其梯度是一个向量,记作 ∇ L \nabla L ∇L,即为函数变化率最大的方向和数值。有如下定义: ∇ L = ( ∂ L ∂ x 1 , ∂ L ∂ x 2 , . . . , ∂ L ∂ x n ) \nabla L=\left ( \frac{\partial L}{\partial x_1}, \frac{\partial L}{\partial x_2}, ..., \frac{\partial L}{\partial x_n} \right ) ∇L=(∂x1∂L,∂x2∂L,...,∂xn∂L)
例如, L ( x , y ) = x 2 + 2 y 2 L(x,y)=x^2+2y^2 L(x,y)=x2+2y2,则 ∇ L = ( 2 x , 4 y ) \nabla L=(2x,4y) ∇L=(2x,4y)。
4.2 算法实现
假如初始时刻 L L L上某点 P ( x 10 , x 20 , . . . , x n 0 ) P(x_{10},x_{20},...,x_{n0}) P(x10,x20,...,xn0),我们需要让它运动到函数的极小值点处:
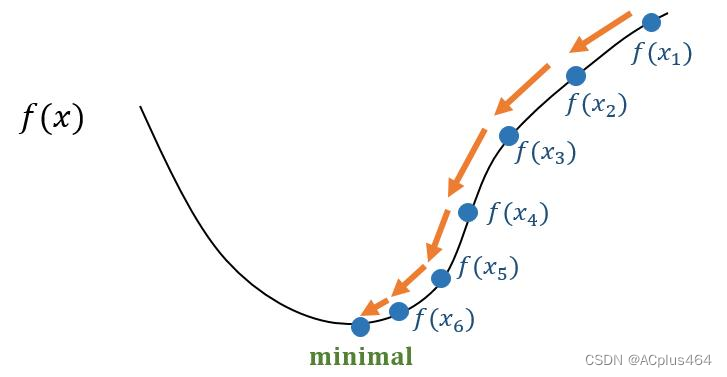
为了实现这一目的,我们可以进行多轮迭代。每一次迭代,都让
P
P
P朝着梯度的反方向运动一定的距离。设学习率为
ϵ
\epsilon
ϵ,那么
P
P
P的运动量可以设置成
ϵ
∇
L
P
\epsilon \nabla L_P
ϵ∇LP。直到
P
P
P的梯度值趋近于0,迭代结束。
为此,可以设置一个迭代结束的条件,比如:当梯度值 ∣ ∇ L P ∣ |\nabla L_P| ∣∇LP∣小于某个很小的值时,就结束该过程。
4.3 机器学习中的实际应用
对于机器学习,我们将损失函数 L L L视作关于模型全部参数 θ = ( θ 1 , θ 2 , . . . , θ n ) \theta=(\theta_1, \theta_2, ..., \theta_n) θ=(θ1,θ2,...,θn)的函数(事实上也的确如此,这是可以证明的),即 L ( θ 1 , θ 2 , . . . , θ n ) L(\theta_1, \theta_2, ..., \theta_n) L(θ1,θ2,...,θn)。
那么,每epoch或batch训练完得到一组参数 θ \theta θ都要根据此时其在损失函数 L ( θ ) L(\theta) L(θ)上的位置,以梯度下降的算法迭代若干次到最低点,由此作为本轮此训练结束后的参数权值更新过程。
⭐都看到这里啦,不如点个免费的赞吧~















 2572
2572











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









