







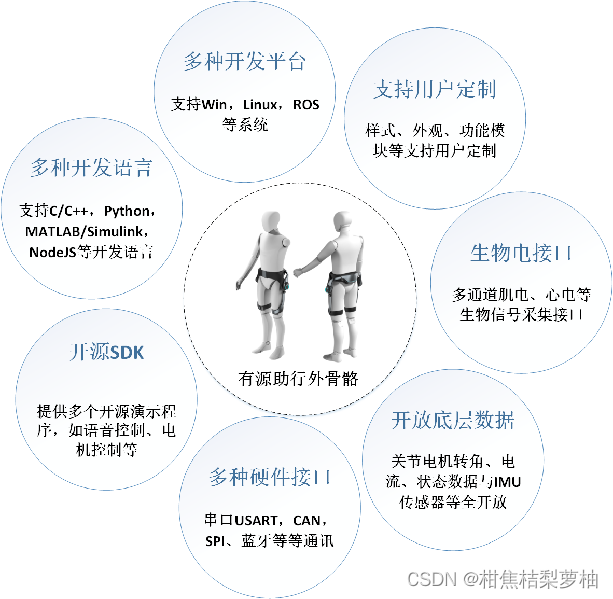
科教版外骨骼机器人平台是一款专为科研工作者、学生、DIY爱好者打造的专业外骨骼开发平台,使用者可以根据不同的场景/使用需求进行功能剪裁以及二次开发,从而快速实现个性化外骨骼产品开发及科研项目研究。
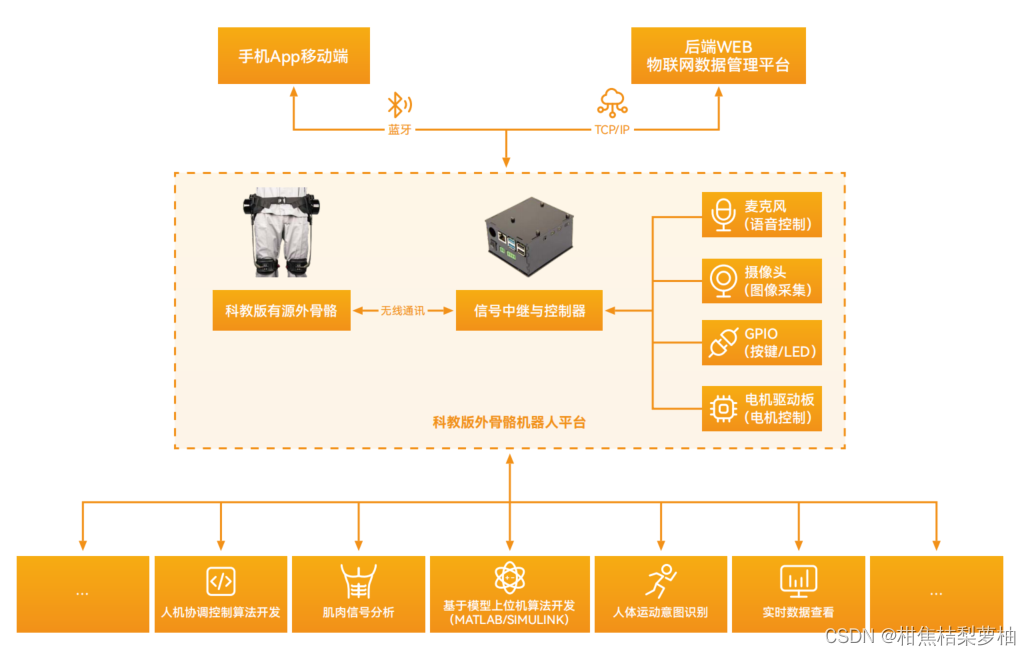
科教版外骨骼平台可研究论文课题方向:
1.基于可穿戴传感器的运动模式识别/步态相位研究、数据处理、多种模式识别算法的比较等
2.机器人控制、有限状态机、基于模型控制器开发、电控及驱动技术、信号处理、人机交互设计等
3.外骨骼控制算法设计/基于可穿戴传感器的人体意图识别/参数优化/机器学习/步态分析等课题
4.基于肌电信号的人机交互算法研究/外骨骼助力效果评价/康复效果评价/运动意图识别/外骨骼控制等
5.机构设计与分析/3D建模软件和运动分析软件如Simscape Multibody/ADAMS等学习/电子软硬件设计
6.单关节外骨骼机器人/基于肌电信号信号的人机交互设备/运动测量与实时定位设备等
外骨骼方向的专利与论文
外骨骼技术作为一种新兴的研究领域,近年来吸引了越来越多的关注和投入。相比其他学科,外骨骼方向的专利与论文的实现相对容易,这得益于科教版外骨骼平台的助力。<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









