






 该文介绍了如何运用Python对大比例尺地形图测绘中的三角高程测量数据进行处理。通过读取并转换竖直角、斜距和高程等信息,计算往返高差、平距、高差改正数,最终得出高程结果。文中提供了具体的Python代码示例,涉及数据读取、数学运算和文件操作。
该文介绍了如何运用Python对大比例尺地形图测绘中的三角高程测量数据进行处理。通过读取并转换竖直角、斜距和高程等信息,计算往返高差、平距、高差改正数,最终得出高程结果。文中提供了具体的Python代码示例,涉及数据读取、数学运算和文件操作。
一、介绍
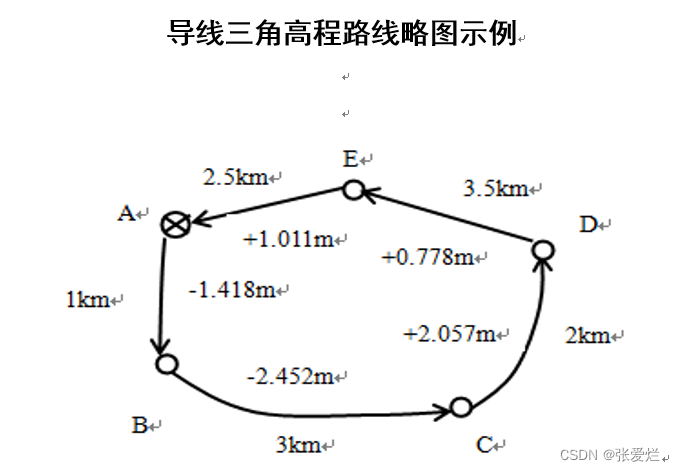
在大比例尺地形图测绘过程中,通过三角高程测量来获取控制点的高程。
已知起始点A的高程,首先测站定为A,目标站定为B,盘左盘右分别读取竖直角读数(建议设置为垂直角90)和斜距,量取仪器高与目标高,由此A到B往测结束。之后在B点架设全站仪,返测A点,重复上述观测方法,完成A到B往返观测。以此类推。
二、组织数据
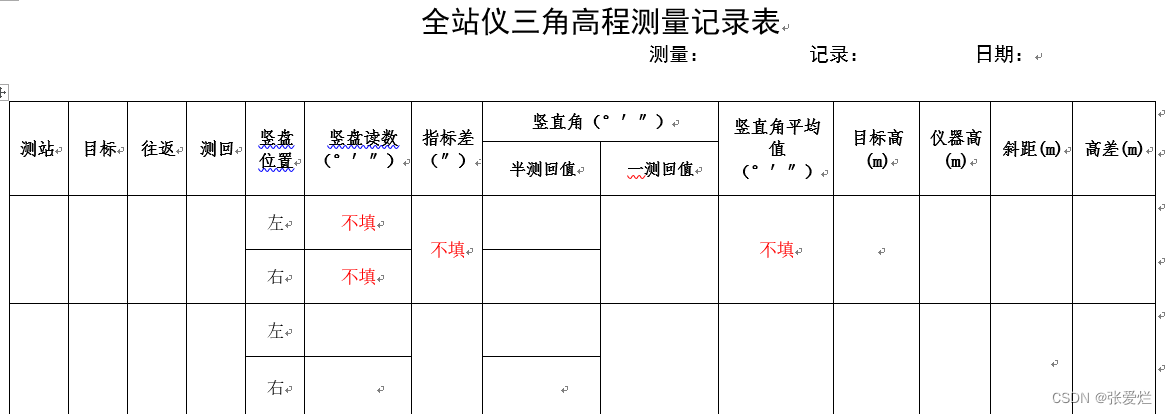
刚刚读取的盘左盘右竖直角即为半测回值,取平均求得一测回值。
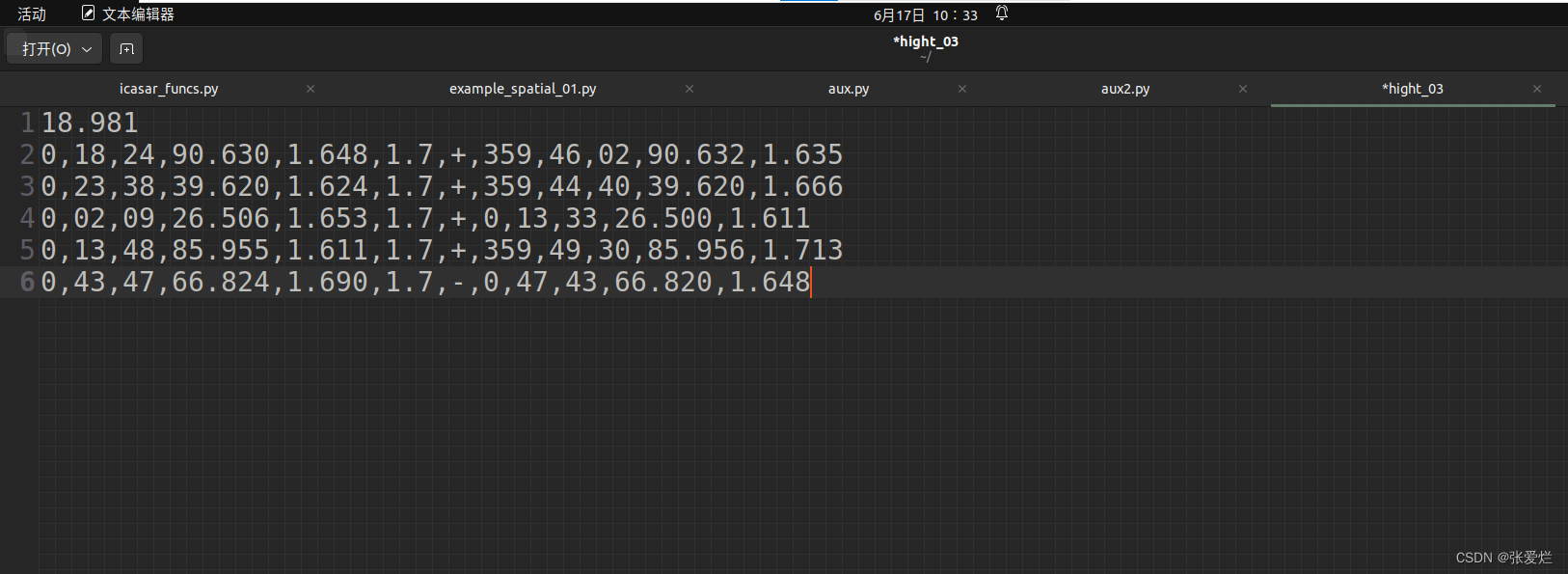
现已知往测返测的竖直角读数(一测回值),目标高,仪器高,斜距,创建一个记事本:
输入格式:
- 高程起始点
- J1(往)竖直角的度,分,秒,J1与J2测站间斜距,仪器高,目标高,竖直角正负值(+/-),J1(返)竖直角度,分,秒,J1与J2斜间距,仪器高
三、python计算三角高程
import math
def dms_to_radians(degree):
#获取度分秒
degrees_str=degree[0]
minutes_str=degree[1]
seconds_str=degree[2]
#转化为数字
degrees=float(degrees_str)
minutes=float(minutes_str)
seconds=float(seconds_str)
#计算弧度
radians=math.radians(degrees+(minutes/60)+(seconds/3600))
return radians
#数据准备
v_degree_list=[] #竖直角弧度
D_list=[] #测站斜距
h_instrument_list=[]
h_target_list=[]
v_degree_list_back=[]#返回观测竖直角弧度
D_list_back=[] #测站返回斜距
h_instrument_list_back=[] #返回测站仪器高
filename='/home/z/hight_02'
with open(filename,'r') as f:
fist_line=f.readline().strip() #起始点高程
for line in f:
items_list=[] #存储竖直角
data=line.strip().split(',')
item1,item2,item3,item4,item5,item6,item7=data[0],data[1],data[2],data[3],data[4],data[5],data[6]
D_list.append(float(item4))
h_instrument_list.append(float(item5))
h_target_list.append(float(item6))
items_list.append(item1)
items_list.append(item2)
items_list.append(item3)
if item7=='+':
v_degree_list.append(dms_to_radians(items_list))
elif item7=='-':
v_degree_list.append(dms_to_radians(items_list)*(-1))
#算一下返回的高差
a_list=[] #存储返回竖直角
a1,a2,a3,a4,a5=data[7],data[8],data[9],data[10],data[11]
D_list_back.append(float(a4))
h_instrument_list_back.append(float(a5))
a_list.append(a1)
a_list.append(a2)
a_list.append(a3)
v_degree_list_back.append(dms_to_radians(a_list))
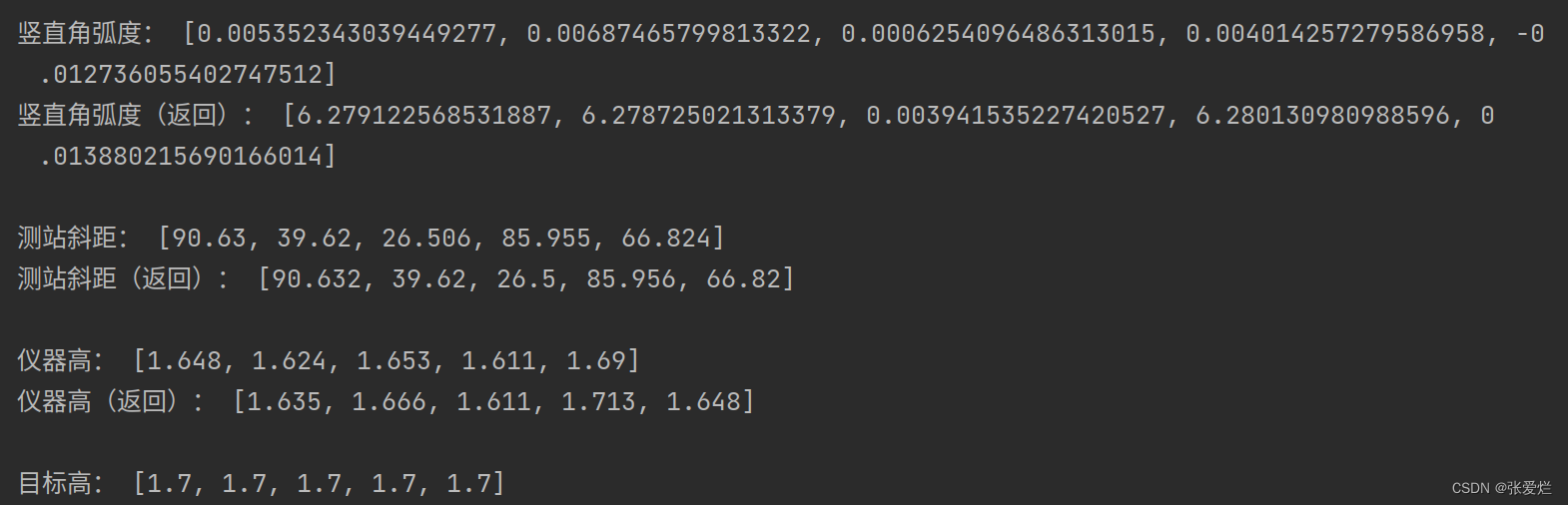
print("\n竖直角弧度:",v_degree_list)
print("竖直角弧度(返回):",v_degree_list_back)
print("\n测站斜距:",D_list)
print("测站斜距(返回):",D_list_back)
print("\n仪器高:",h_instrument_list)
print("仪器高(返回):",h_instrument_list_back)
print("\n目标高:",h_target_list)
#计算高差
H_detla_list=[]
for a,b,c,d in zip(v_degree_list,D_list,h_instrument_list,h_target_list):
h=math.sin(a)*b+c-d
H_detla_list.append(h)
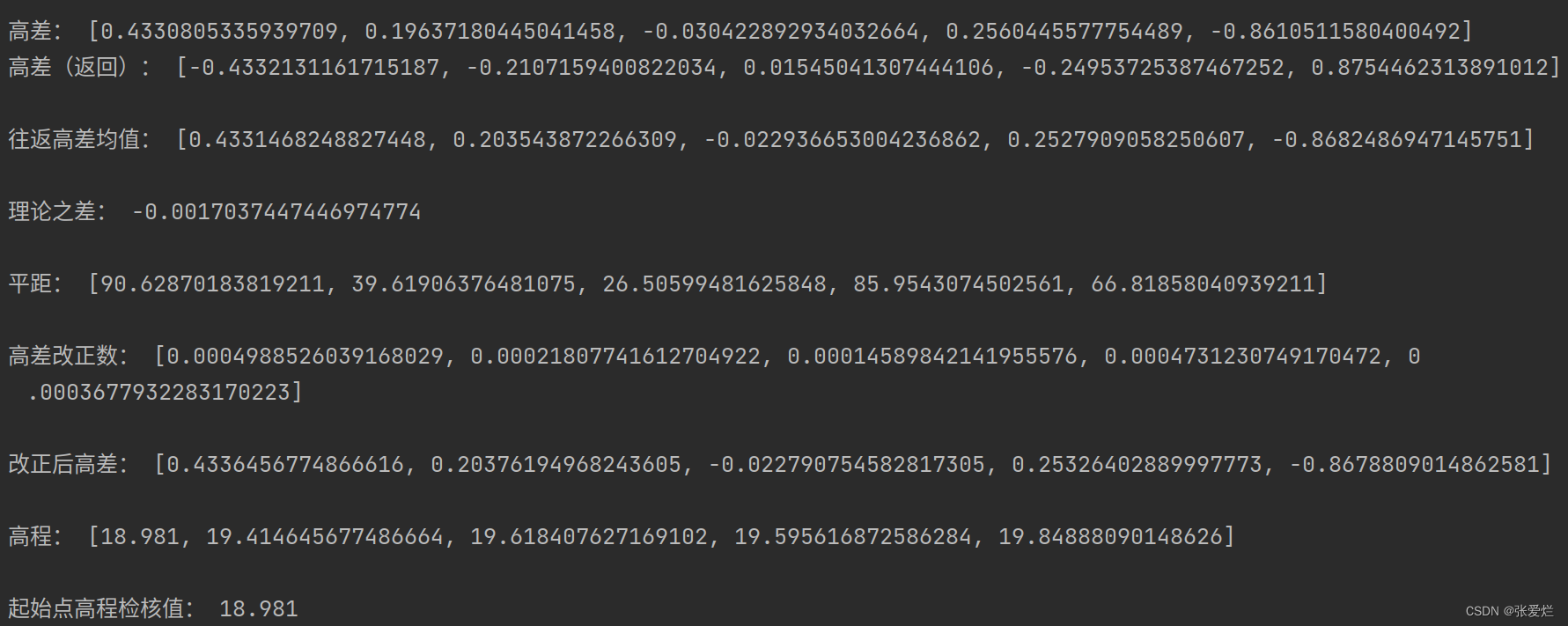
print("\n高差:",H_detla_list)
H_detla_list_back=[] #返回测回高差
for a,b,c,d in zip(v_degree_list_back,D_list_back,h_instrument_list_back,h_target_list):
h=math.sin(a)*b+c-d
H_detla_list_back.append(h)
print("高差(返回):",H_detla_list_back)
H_detla_list_average_abs=[]
H_detla_list_average=[]
for m,n in zip(H_detla_list,H_detla_list_back):
h=(abs(m)+abs(n))/2
if m>0:
H_detla_list_average.append(h)
elif m<0:
H_detla_list_average.append(h*(-1))
print("\n往返高差均值:",H_detla_list_average)
#计算高差改正数
H_sum=sum(H_detla_list_average)
print("\n理论之差:",H_sum)
D_hor_list=[]
for a,b in zip(v_degree_list,D_list): #计算平距
D_hor_list.append(math.cos(a)*b)
print("\n平距:",D_hor_list)
D_sum=sum(D_hor_list) #在此只计算往测平距,未取平均,可修改
detla=[] #高差改正数
for item in D_hor_list:
detla.append((item/D_sum)*H_sum)
sign=-1
detla=list(map(lambda x:x*sign,detla))
print("\n高差改正数:",detla)
H_detla_new_list=[] #改正后高差
for m,n in zip(H_detla_list_average,detla):
H_detla_new_list.append(m+n)
print("\n改正后高差:",H_detla_new_list)
#高程计算
Hight_list=[]
H=float(fist_line)
for item in H_detla_new_list:
Hight_list.append(H)
H+=item
print("\n高程:",Hight_list)
#高程检核
fist_line_check=Hight_list[-1]+H_detla_new_list[-1]
print("\n起始点高程检核值:",fist_line_check)运行结果:

















 626
626

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









