






一、创建产品
1.打开机智云官网
机智云|智能物联网操作系统机智云官网:机智云|智能物联网操作系统

2.找到开发者平台,创建个人账号

3.注册账号

登录
4、点击创建产品,创建一个新产品

下一步

5、进入到新建产品中,根据自己想要的功能点击去编辑添加数据点(功能定义)

6、添加所需要数据点(添加功能)

本设计设置的数据点如下所示。

二、调试设备
1.返回开发者中心首页,点击“下载中心”

2.下载APP调试工具

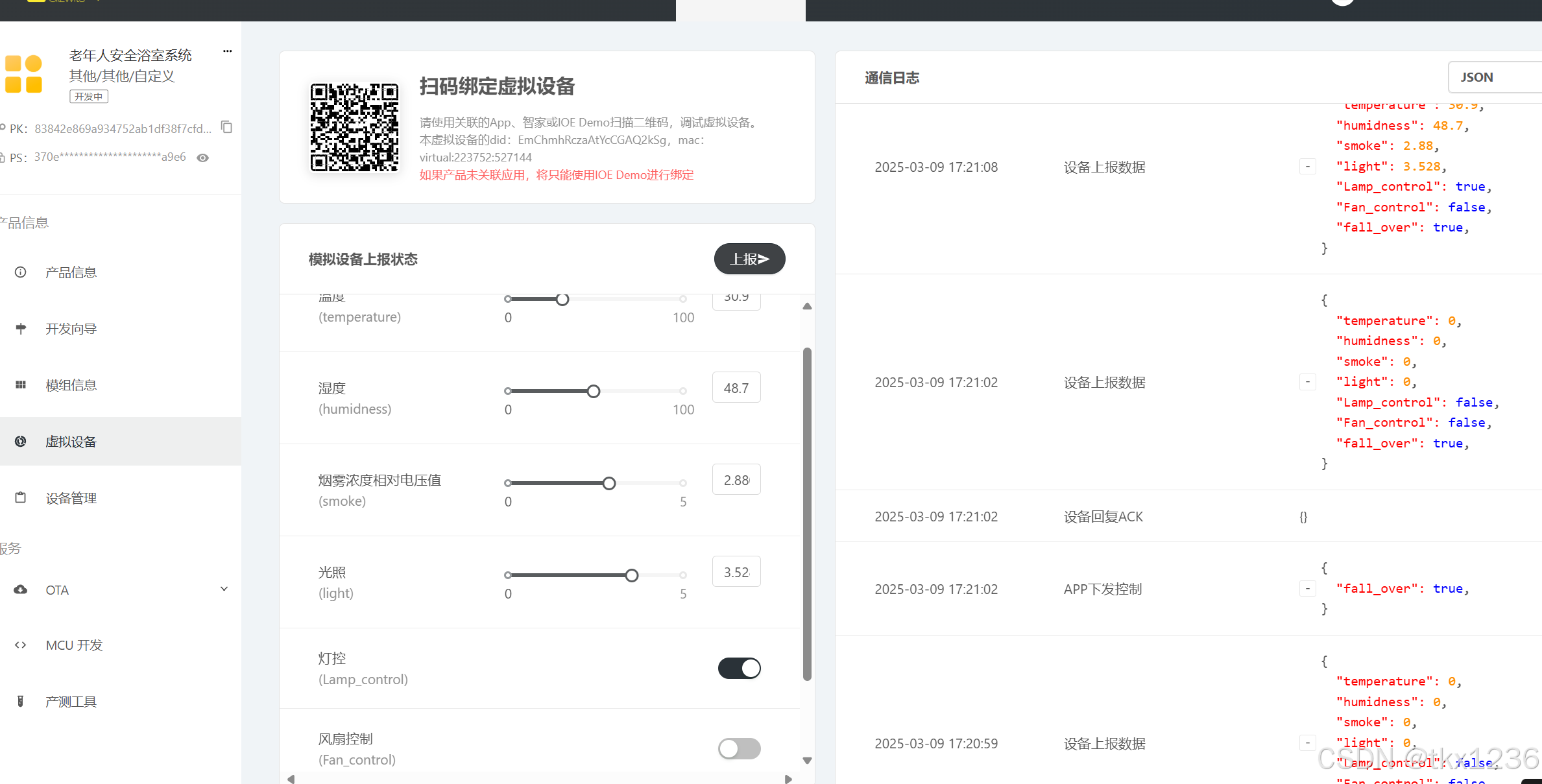
3.下载完成后,打开虚拟设备调试
返回到虚拟设备调试中。
4.手机端调试APP扫描二维码绑定设备,并可以进行调试



三、刷入机智云固件
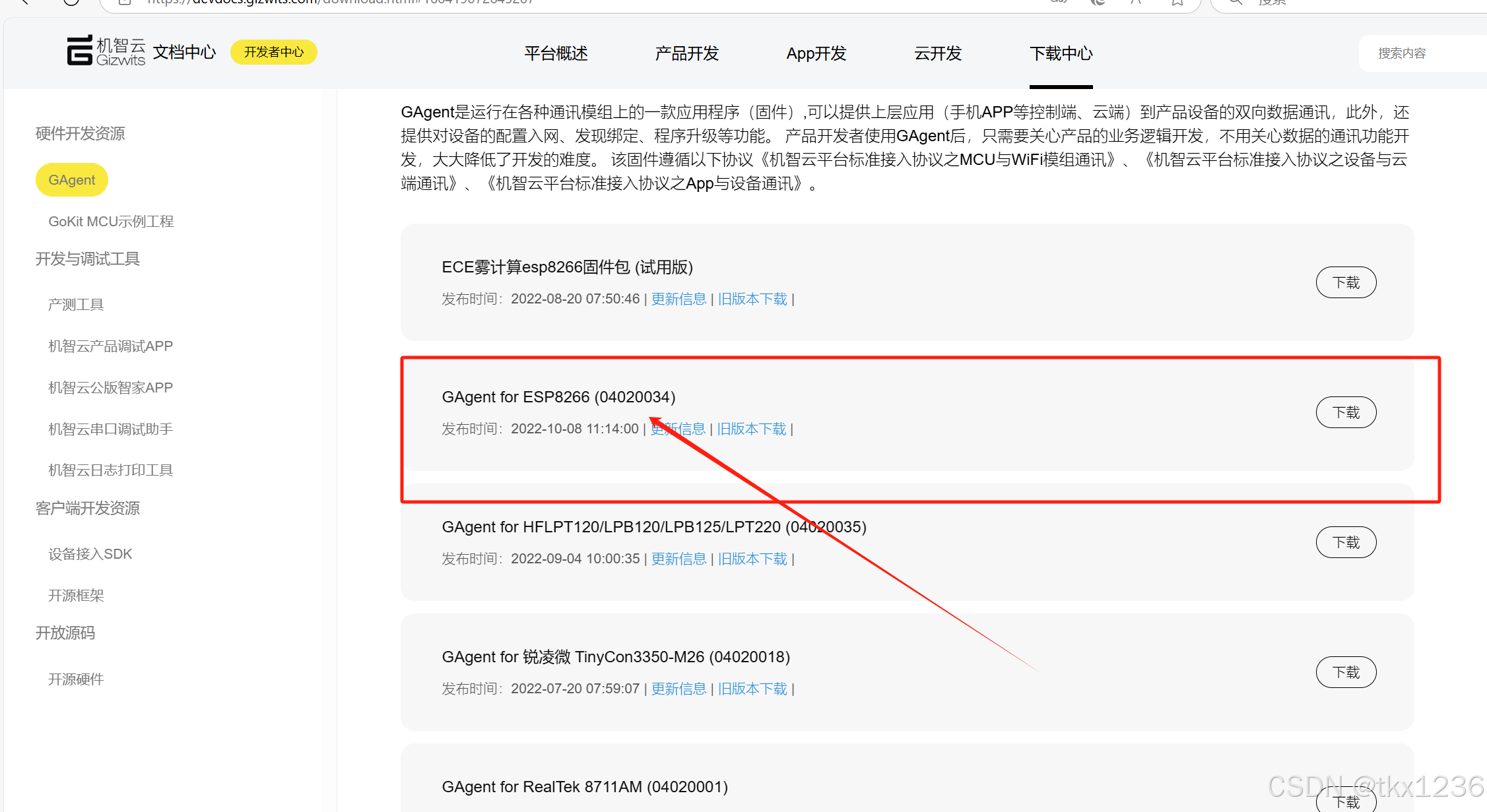
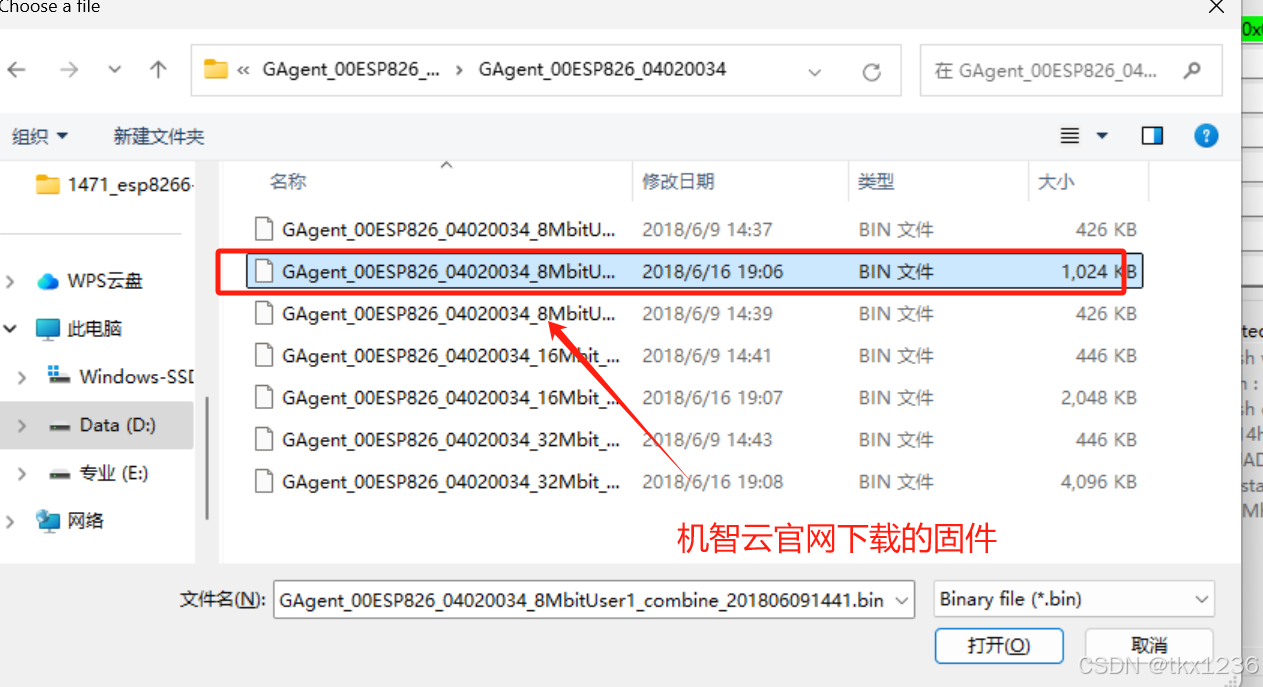
1.刷入机智云联网固件
下载中心里:Gizwits
下载完成后,进行解压缩
ESP8266-01s和CH340烧录机智云固件全解_机智云esp01s固件-CSDN博客ESP8266-01s和CH340烧录机智云固件详细介绍:ESP8266-01s和CH340烧录机智云固件全解_机智云esp01s固件-CSDN博客ESP8266-01s和CH340烧录机智云固件全解_机智云esp01s固件-CSDN博客
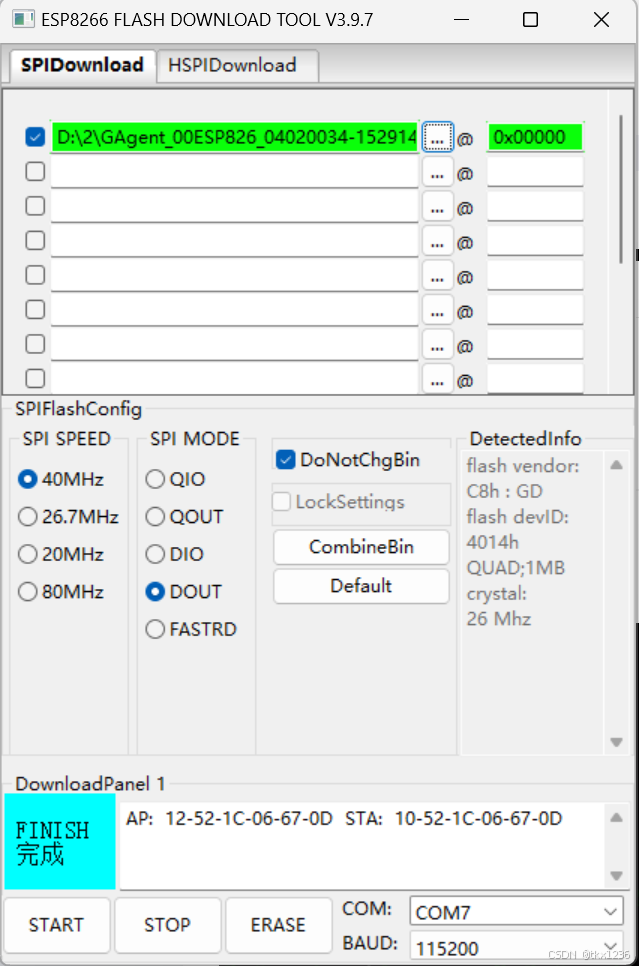
烧录软件在
固件烧录工具
ESP8266-01s和CH340烧录机智云固件全解_机智云esp01s固件-CSDN博客
解压后打开
等待烧录完成。
2.烧录过程中可能出现的问题
1.需要保证IO0接地,可以用烧录器的GND和其相连
2.把ESP8266的3V3快速断开后再相连,再点击烧录即可其相连
四、生成Gizwits代码,准备移植STM32中
1.返回机智云官网,生产代码

等待代码生成
下载完成后解压缩:

2.开始移植到STM32文件中
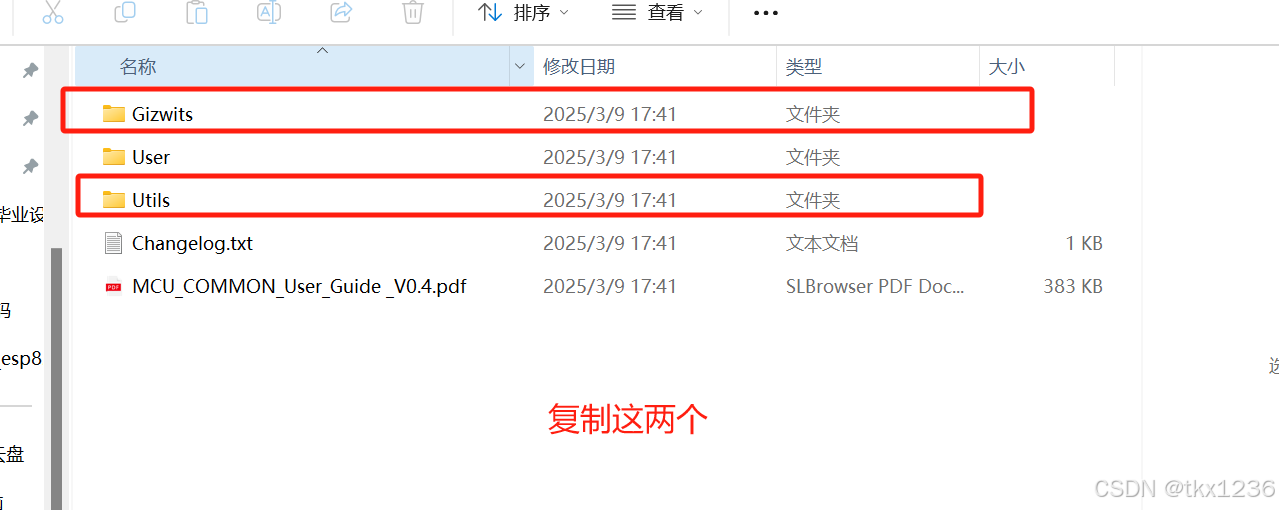
然后找到自己的32工程,复制到工程中
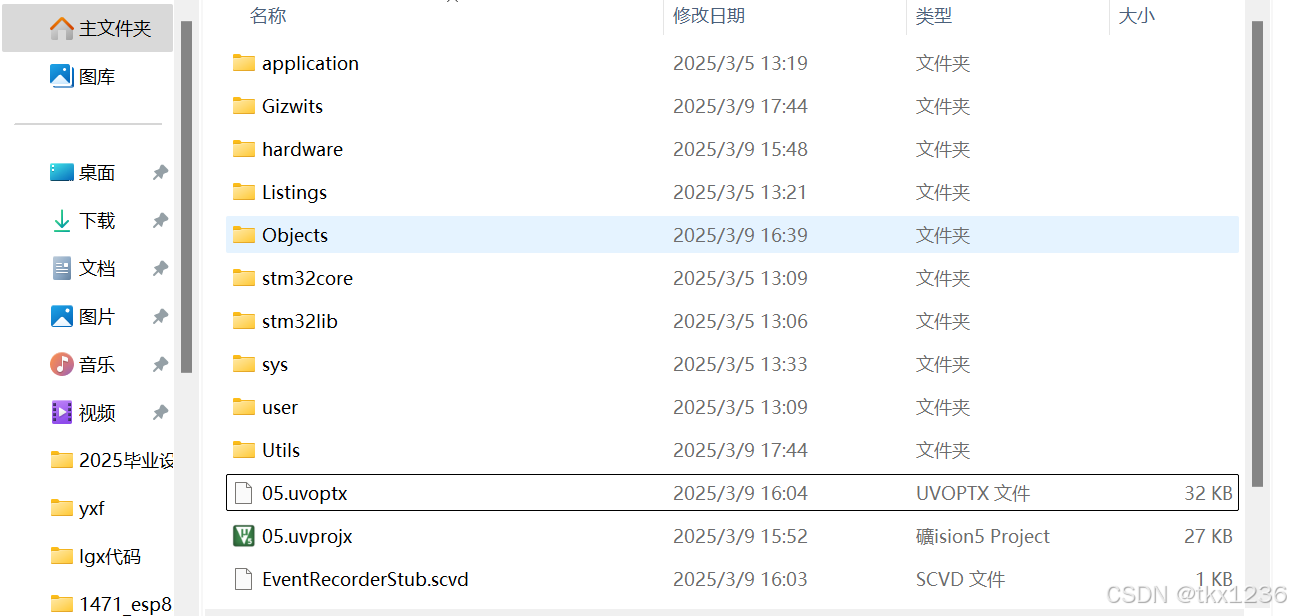
打开工程配置设备虚拟树
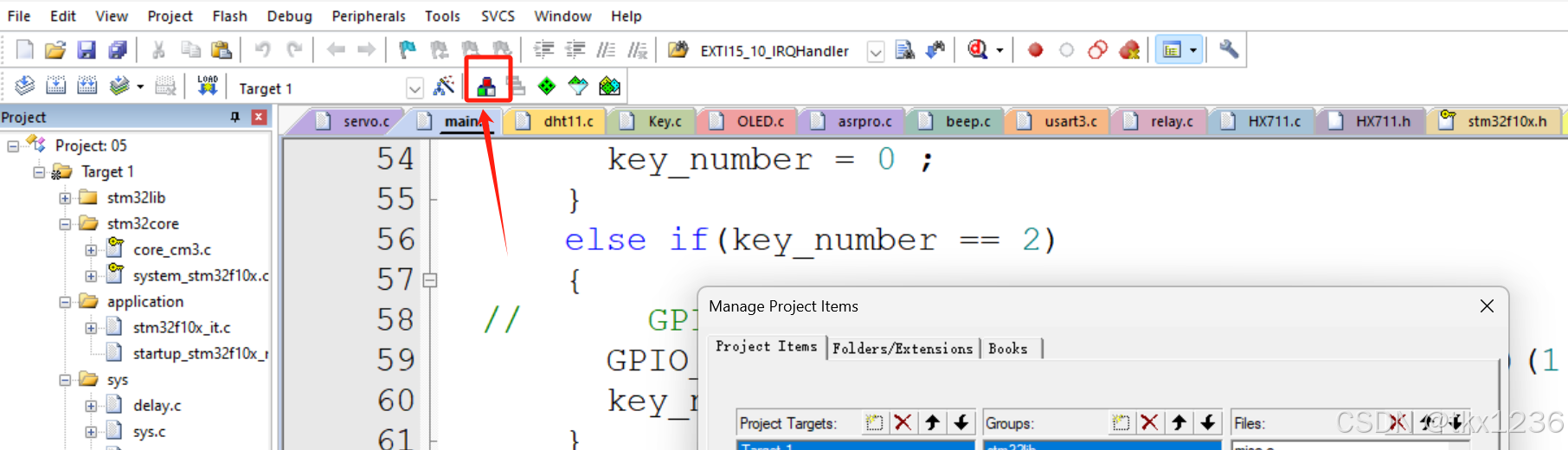
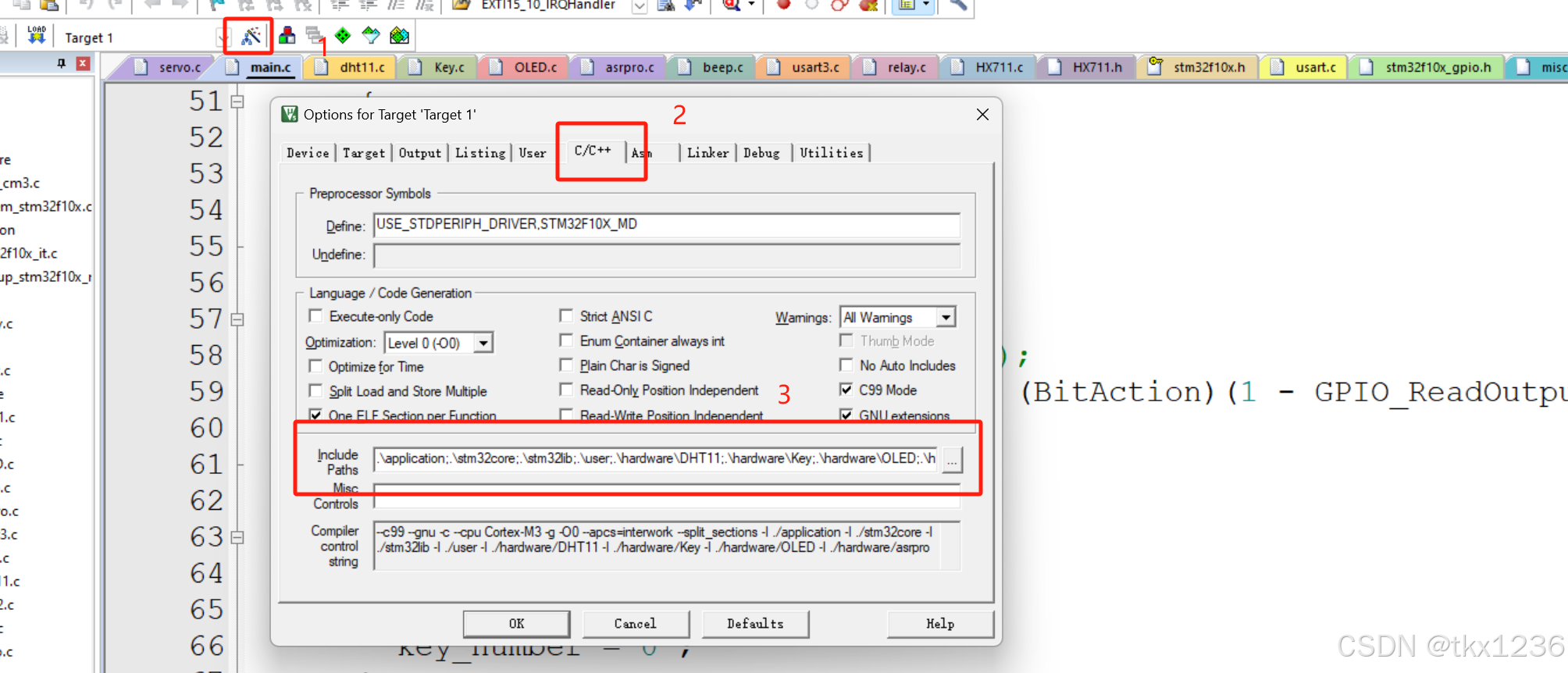
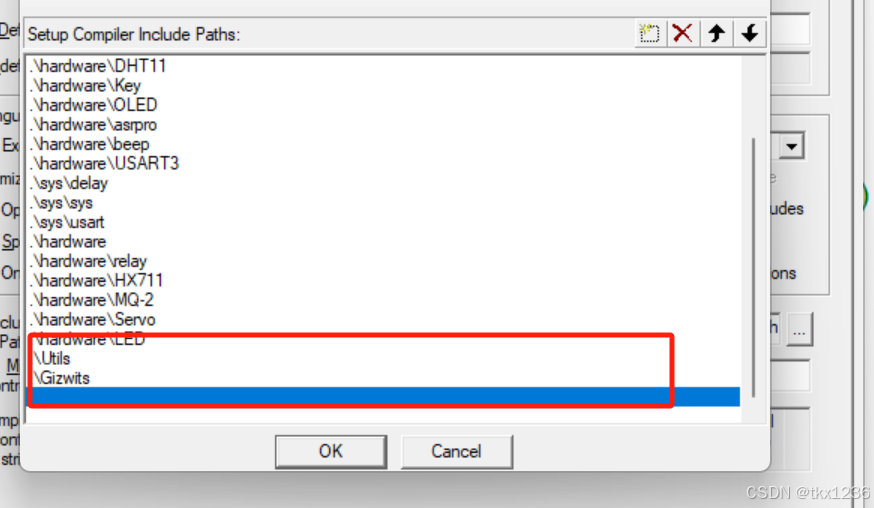
添加对应的文件
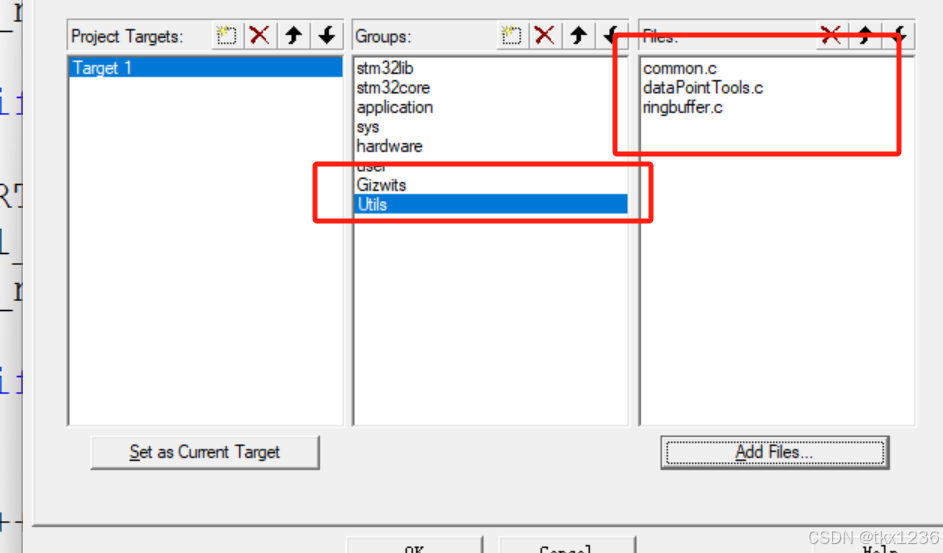
包含相关头文件路径
编写对应的USART代码 ---- 注意波特率必须为9600,本设计用的是stm32f103c8t6的串口3
void uart3_init(u32 bound)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//时钟GPIOB、USART3
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE);
//USART3_TX PB10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//USART3_RX PB11
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//一般设置为9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART3, &USART_InitStructure);
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 2;
NVIC_Init(&NVIC_InitStruct);
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);//开启中断
USART_Cmd(USART3, ENABLE); //使能串口
}
void USART3_IRQHandler(void)
{
u8 data = 0;
if(USART_GetITStatus(USART3,USART_IT_RXNE)!=RESET)//接收中断标志位拉高
{
USART_ClearITPendingBit(USART3,USART_IT_RXNE);
data = USART_ReceiveData(USART3);
gizPutData(&data,1); //这段话不要忘记
}
}编写1ms定时器更新中断,作为心跳
#include "timer.h"
#include "gizwits_protocol.h"
#include "gizwits_product.h"
//通用定时器4中断初始化
//这里时钟选择为APB1的2倍,而APB1为36M
//arr:自动重装值。
//psc:时钟预分频数
//这里使用的是定时器4!
void TIM4_Int_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //时钟使能
//定时器TIM4初始化
TIM_TimeBaseStructure.TIM_Period = 1000 - 1; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =72 - 1; 72Mhz T=1/f = 1000hz
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位
TIM_ITConfig(TIM4,TIM_IT_Update,ENABLE ); //使能指定的TIM4中断,允许更新中断
//中断优先级NVIC设置
NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn; //TIM4中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //初始化NVIC寄存器
TIM_Cmd(TIM4, ENABLE); //使能TIMx
}
//定时器4中断服务程序
void TIM4_IRQHandler(void) //TIM4中断
{
if (TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET) //检查TIM4更新中断发生与否
{
TIM_ClearITPendingBit(TIM4, TIM_IT_Update );
gizTimerMs();
}
}五、机智云相关代码开始移植
相关移植步骤
1.实现与模组通信串口驱动
2.实现串口打印函数printf();
3.实现1ms定时器,gizTimerMs()维护系统时间 (提供时基)
4.实现MCU复位函数,模组可请求MCU复位
5.实现配置入网功能,调用gizwitsSetMode()函数实现模组配网功能
6.实现userHandle()数据的采集(上行逻辑)
7.实现 gizwitsEventProcess()控制命令的具体执行(下行逻辑)
1.WIFI串口接收数据写入缓冲区
串口包含这个机智云的头文件
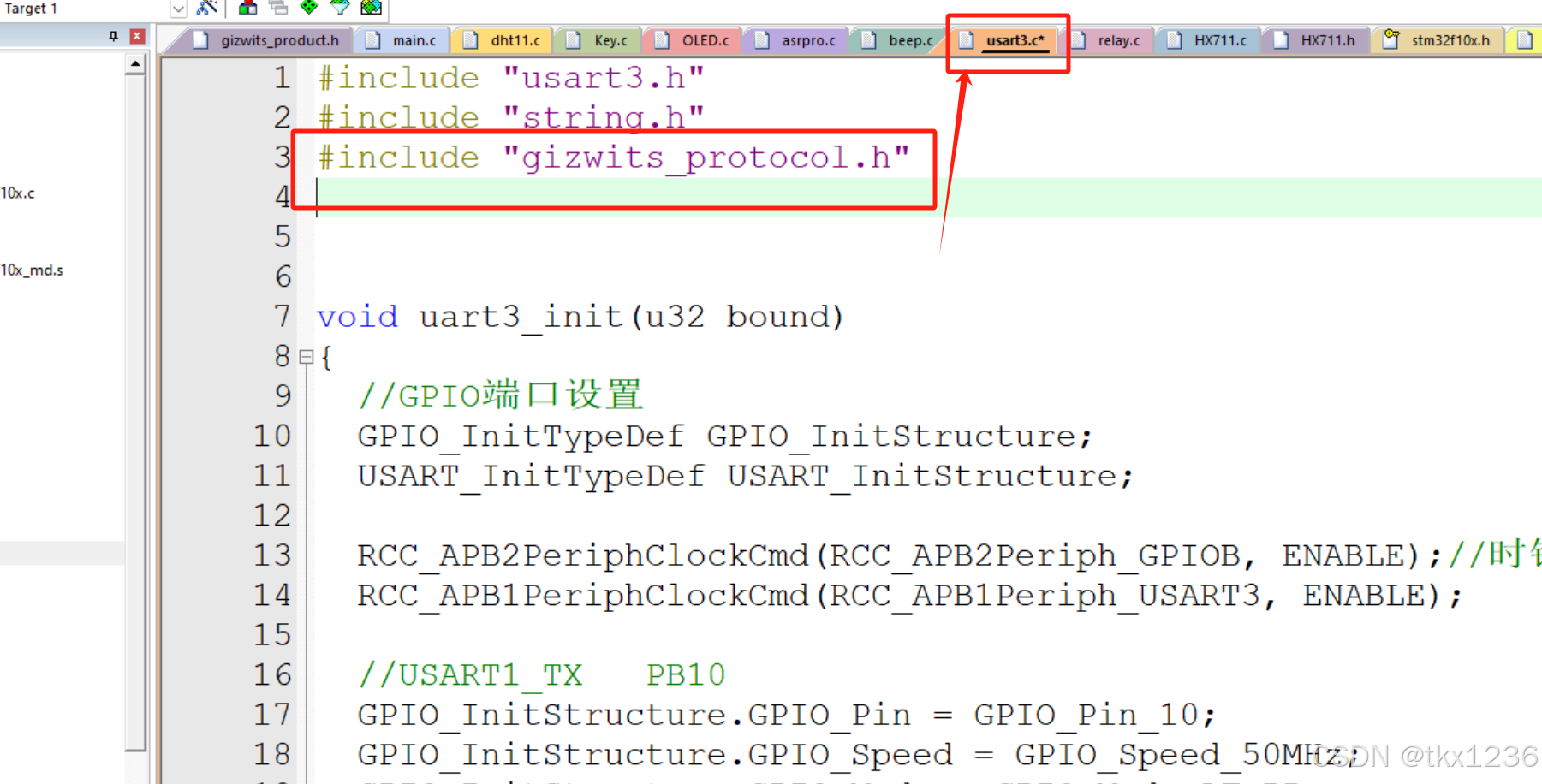
2.实现uartWrite()串口发送数据
在该文件中找到uartWrite()这个函数,并在给文件上方添加所用串口的.h文件
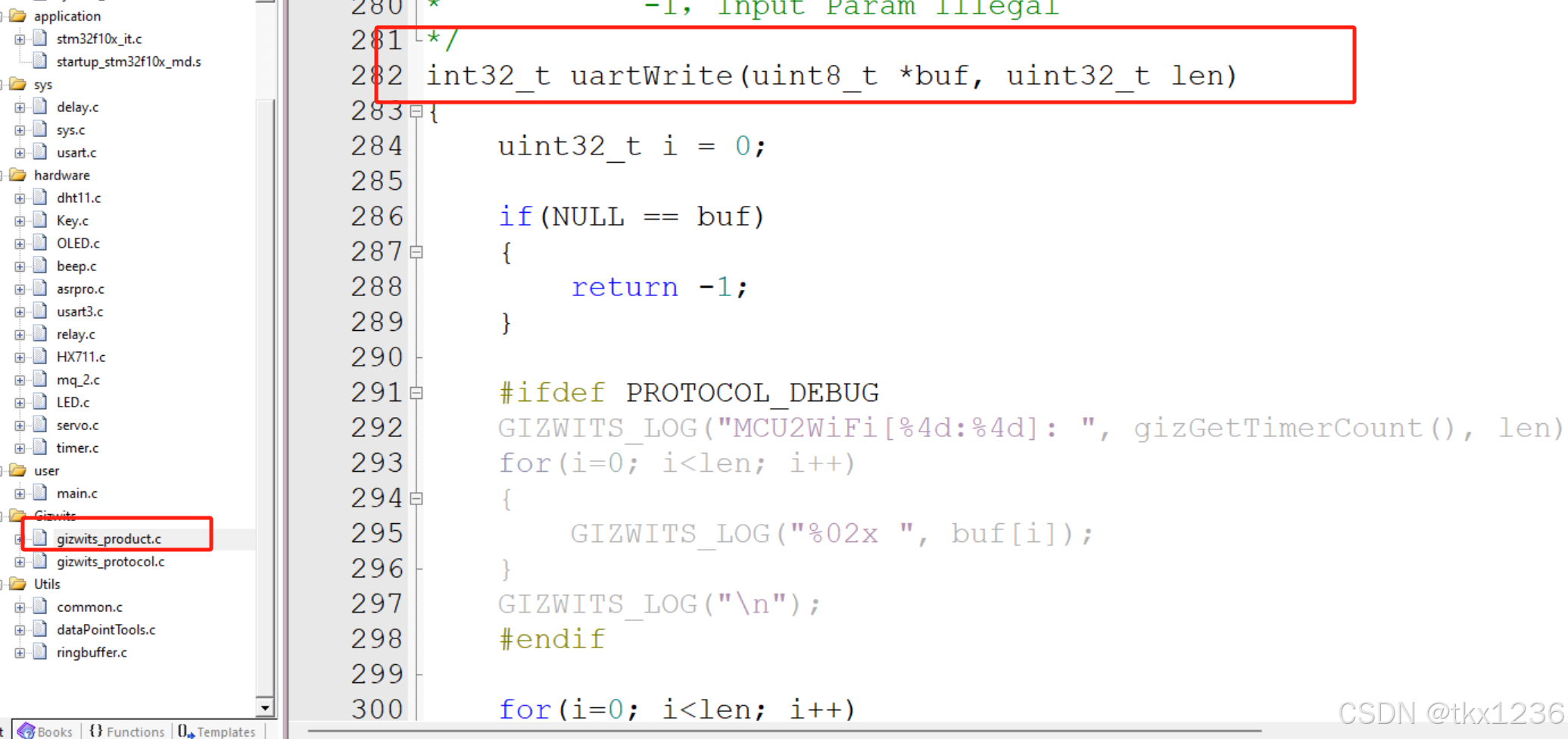
该函数修改为
int32_t uartWrite(uint8_t *buf, uint32_t len)
{
uint32_t i = 0;
if(NULL == buf)
{
return -1;
}
#ifdef PROTOCOL_DEBUG
// GIZWITS_LOG("MCU2WiFi[%4d:%4d]: ", gizGetTimerCount(), len);
for(i=0; i<len; i++)
{
// GIZWITS_LOG("%02x ", buf[i]);
}
// GIZWITS_LOG("\n");
#endif
for(i=0; i<len; i++)
{
USART_SendData(USART3, buf[i]);//STM32 test demo
while (USART_GetFlagStatus(USART3, USART_FLAG_TXE) == RESET);
//Serial port to achieve the function, the buf[i] sent to the module
if(i >=2 && buf[i] == 0xFF)
{
USART_SendData(USART3,0x55);
while (USART_GetFlagStatus(USART3, USART_FLAG_TXE) == RESET);
//Serial port to achieve the function, the 0x55 sent to the module
//USART_SendData(UART, 0x55);//STM32 test demo
}
}
return len;
}3.实现毫秒定时
对于使用的定时器4,中断里添加相应代码
//定时器4中断服务程序
void TIM4_IRQHandler(void) //TIM4中断
{
if (TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET) //检查TIM4更新中断发生与否
{
TIM_ClearITPendingBit(TIM4, TIM_FLAG_Update );
gizTimerMs();
}
}编译会出现警告,找不到该函数,gizTimerMs();函数没有定义,在gizwits_product.h文件中进行定义
4.实现芯片复位函数
修改该函数在gizwits_product.h文件中
改为下边的代码
void mcuRestart(void)
{
__set_FAULTMASK(1);
NVIC_SystemReset();
}5.实现配置入网
模组支持 SoftAp 和 AirLink 两种方式配置入网, 相应接口为 gizwitsSetMode(), 三种模式如下:
WIFI_RESET_MODE 恢复默认出厂设置
WIFI_SOFTAP_MODE 热点配网
WIFI_AIRLINK_MODE 手机广播配网
在此之前主函数中添加头文件
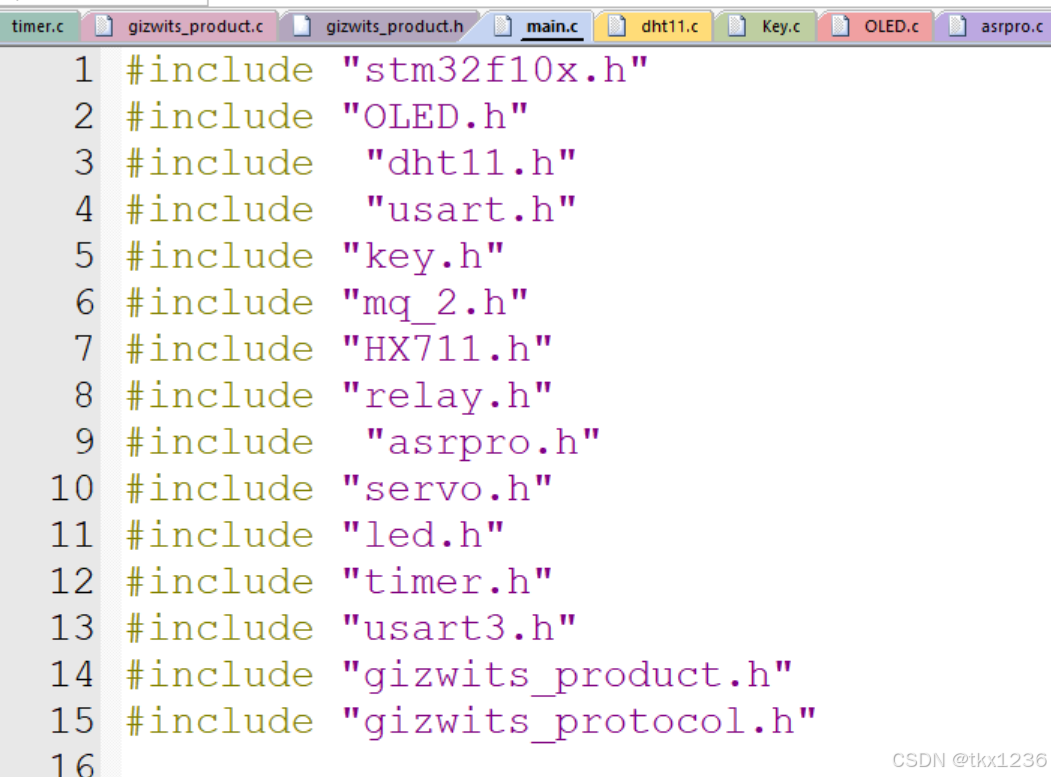
以及初始化
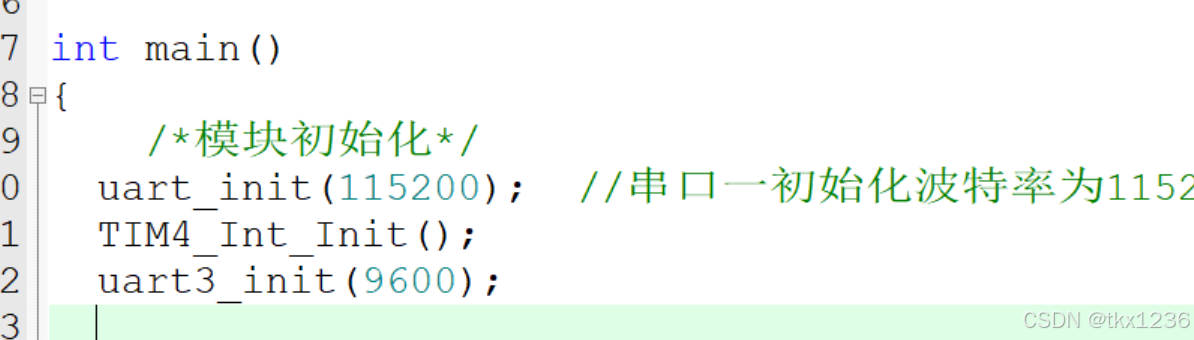
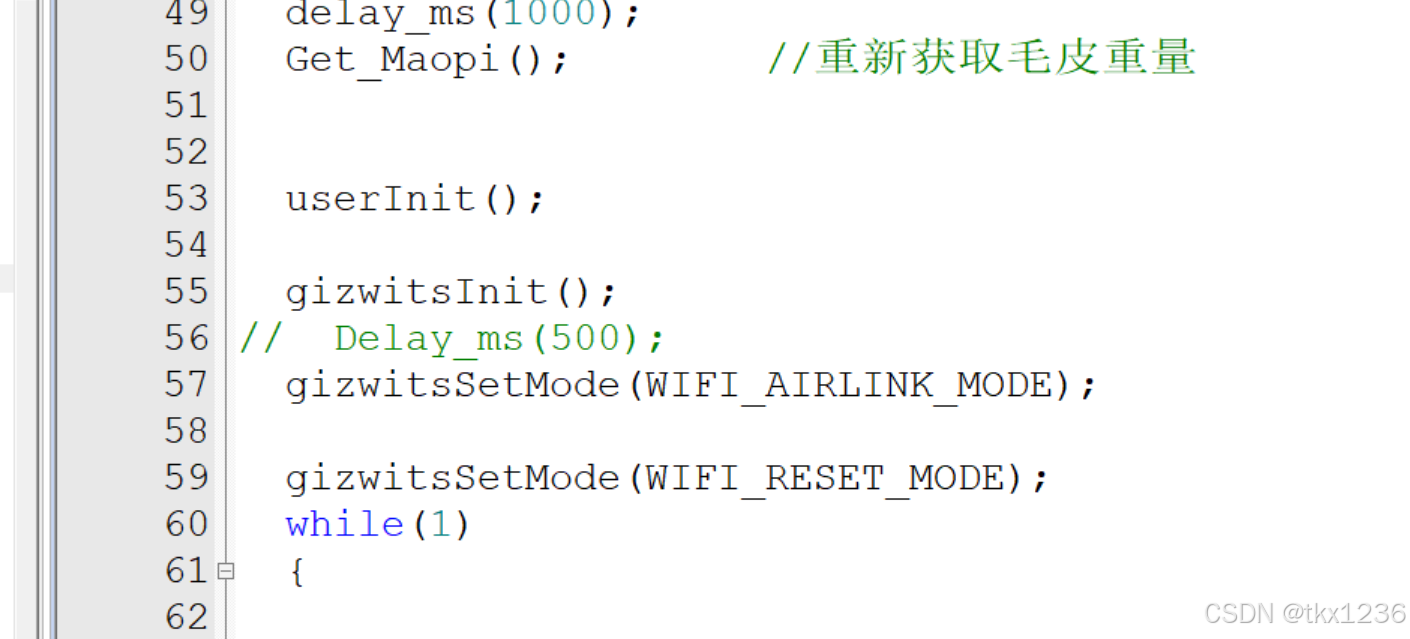
添加机智云初始化代码,本次选择了airlink配网模式
userInit();
gizwitsInit();
// Delay_ms(500);
gizwitsSetMode(WIFI_AIRLINK_MODE);
gizwitsSetMode(WIFI_RESET_MODE);6.协议处理
根据采集到的数据,然后调用函数 gizwitsHandle()、userHandle()上报,函数位置在gizwits_protocol.c文件中,该函数主要完成协议数据的处理及数据主动上报的相关操作
在main.c进行外部声明
/** Current datapoint */
extern dataPoint_t currentDataPoint;在while(1)调用gizwitsHandle()和userHandle()上报数据
gizwitsHandle(¤tDataPoint);
userHandle();到这一步,配网就结束了,接下来开始配置自己需要传输的数据
7.数据上下发配置
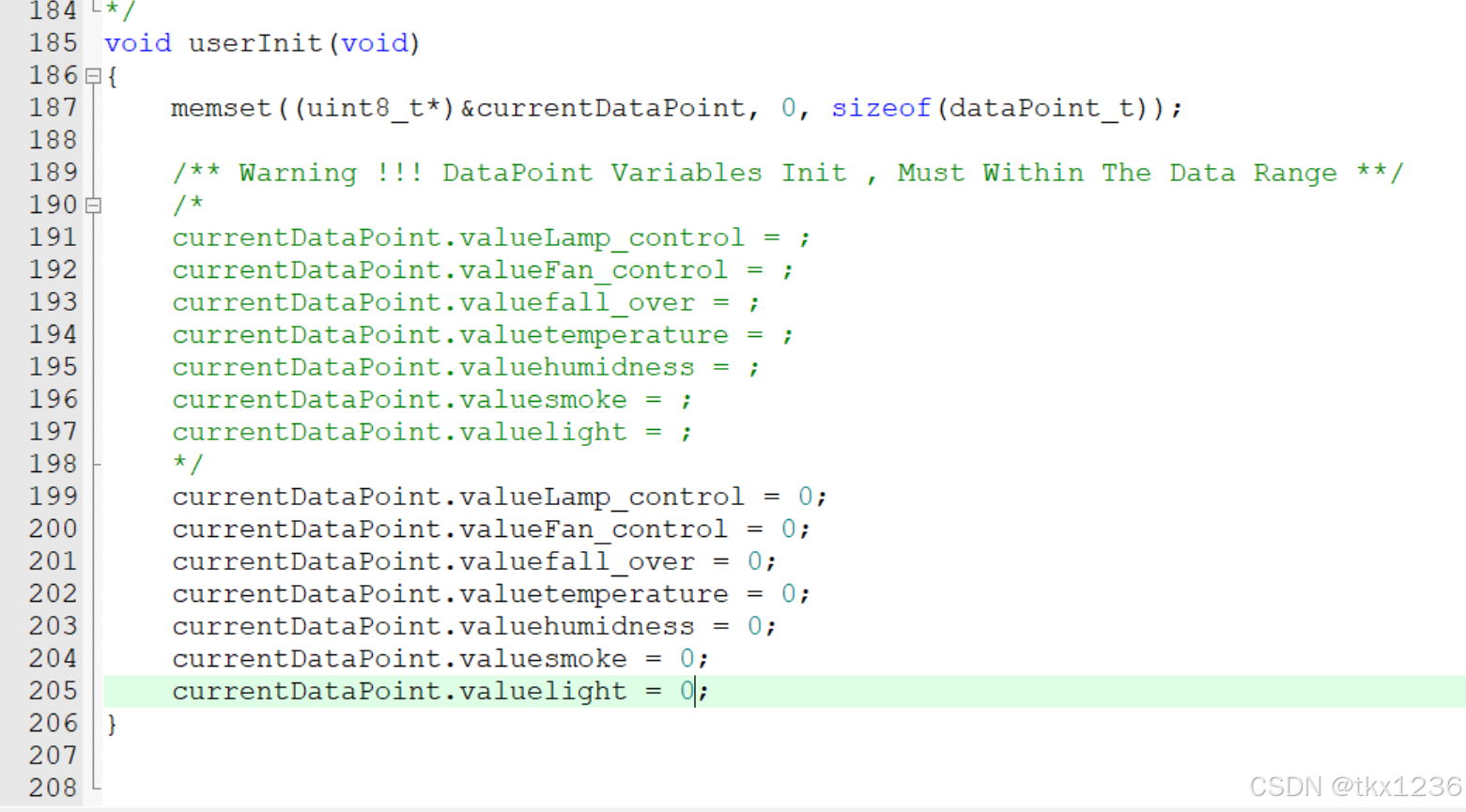
上发数据用到的函数为userHandle(),这个函数是在gizwits_protocol.c中
如图,本设计一开始将参数都初始化为0
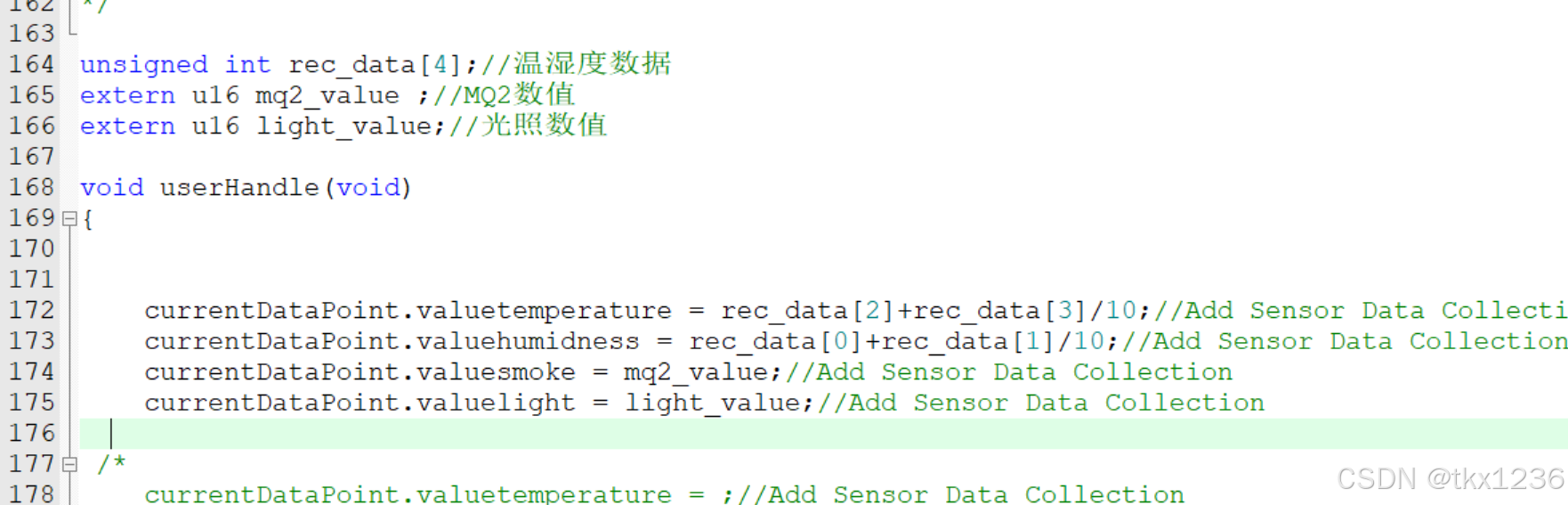
采集数据的函数
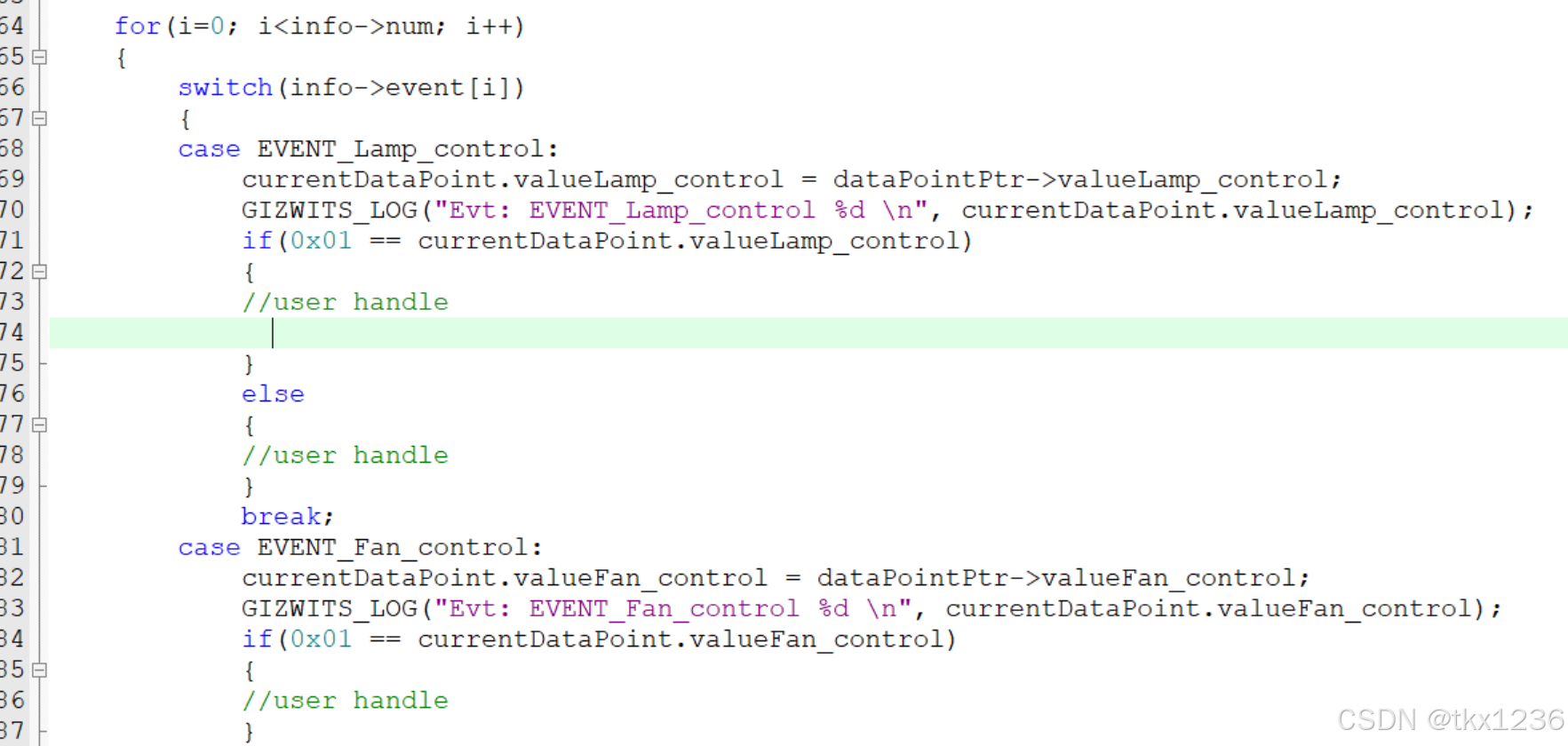
该函数中内容作为机智云app下发数据
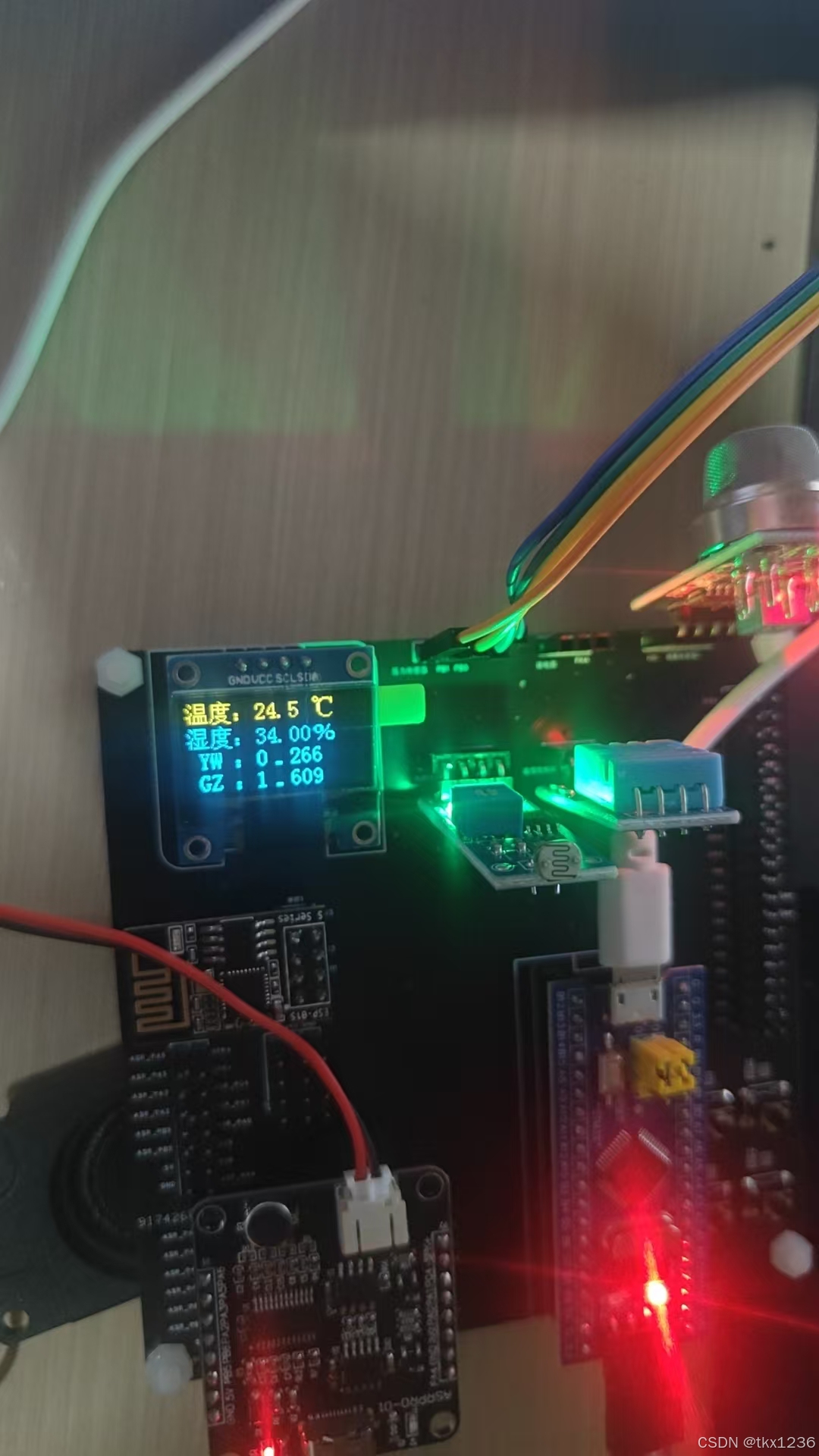
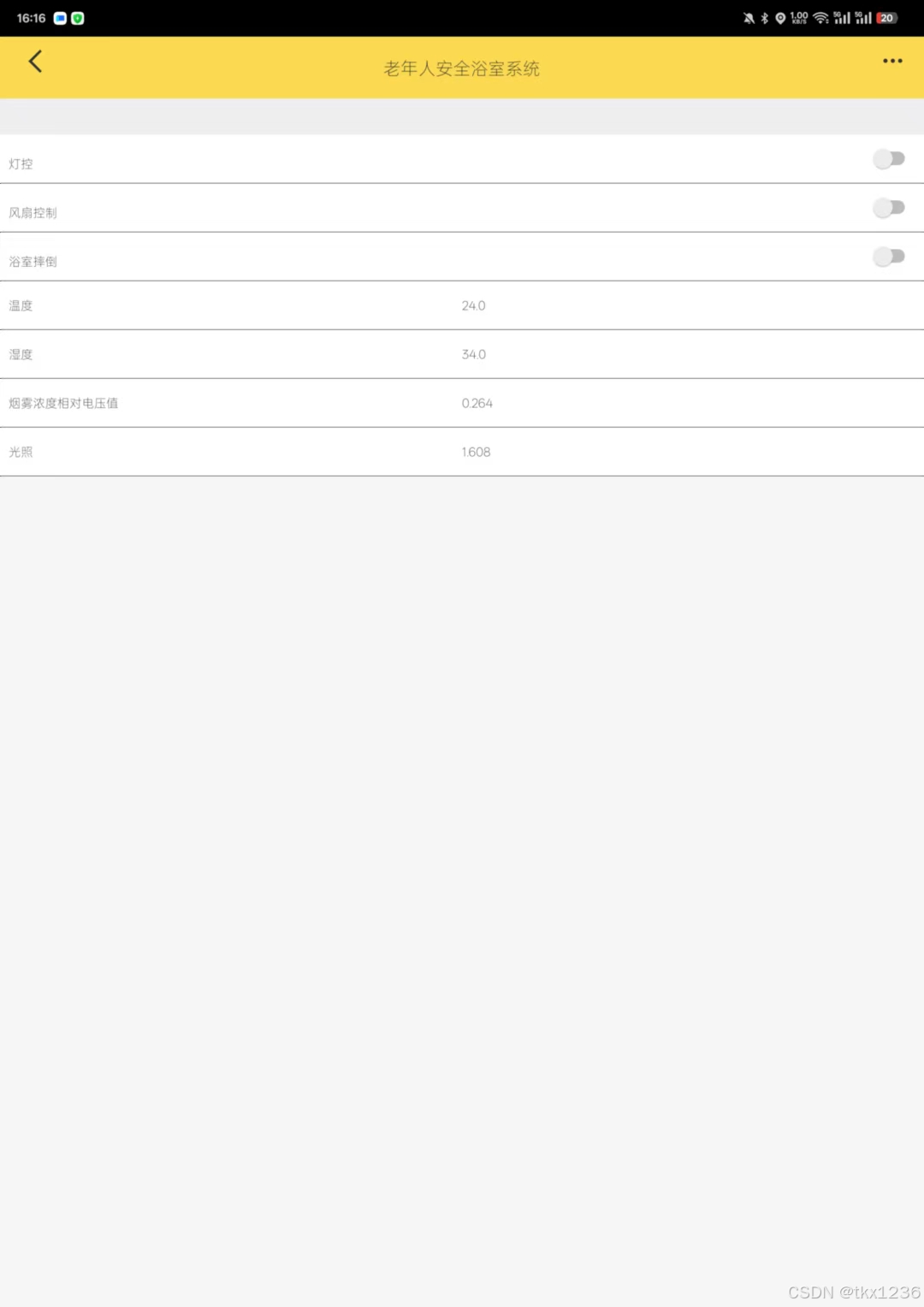
六、至此,完成所有步骤,实验现象如下:
七、WIFI连接出现的问题
出现timeout超时,可能原因是主函数中给了延时函数,可以尝试屏蔽掉。如果出现连接数据传输不稳定,WIFI连接容易掉,可以尝试一下。
注释掉箭头指向的这三行
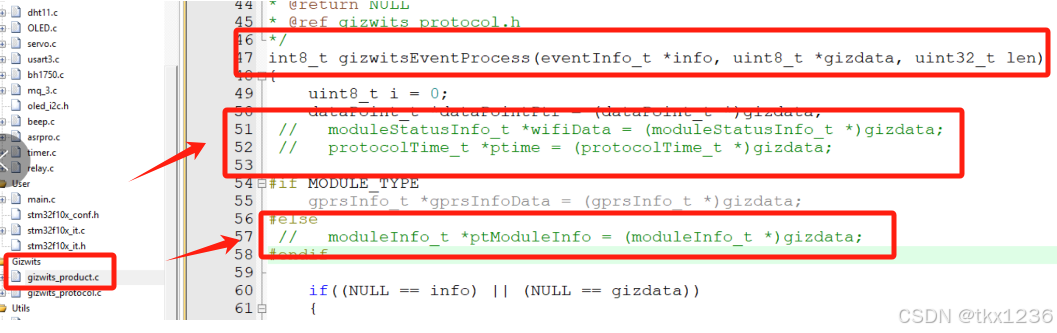
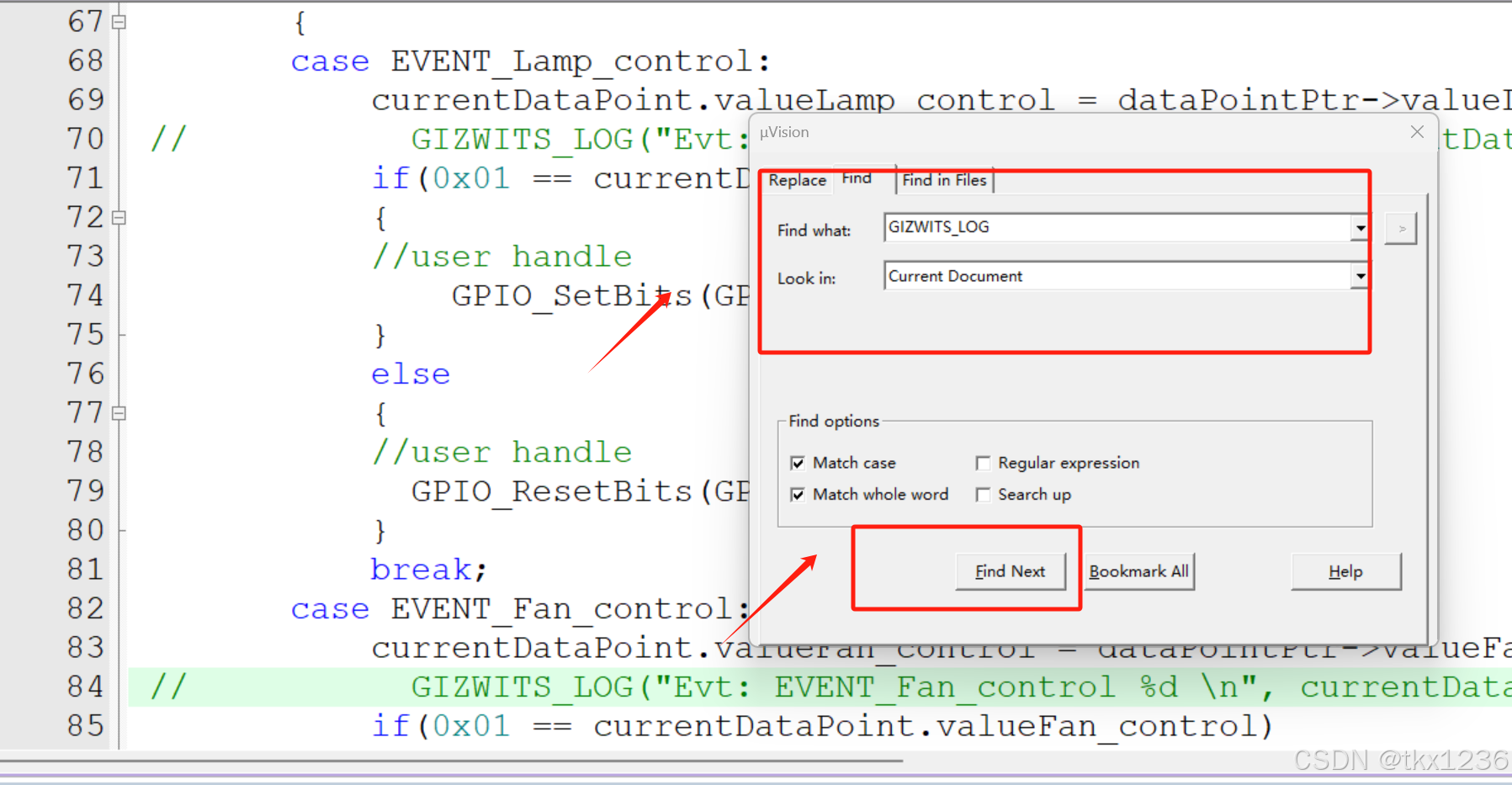
并且把这个语句能搜索到的全部注释掉,可以ctrl+f 搜索都在这两个文件中
这个主要是串口1打印内容(gizwits_product.c,gizwits_protocol.c)



















 5256
5256

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









