






目录
1. QR分解的基本原理
QR分解是线性代数中一种重要的矩阵分解技术,它将一个矩阵分解为一个正交矩阵和一个上三角矩阵的乘积。其基本原理如下:
给定一个m×n矩阵A,QR分解将A分解为:
其中:
Q是一个m×m正交矩阵,即Q的转置等于其逆矩阵。
R是一个m×n上三角矩阵,即R的下方元素均为0。
2. QR分解的数学性质
2.1 QR分解的几何意义
QR分解将一个矩阵分解为一个正交矩阵和一个上三角矩阵。正交矩阵的列向量是单位正交向量,即它们相互垂直且具有单位长度。上三角矩阵是一个对角线以上元素为零的矩阵。
从几何上讲,QR分解将一个矩阵分解为一个旋转和平移的组合。正交矩阵代表旋转,它将矩阵的列向量旋转到标准正交基中。上三角矩阵代表平移,它将旋转后的列向量平移到目标位置。
2.2 QR分解的正交性
QR分解的一个重要性质是正交性。正交矩阵的转置等于其逆矩阵,即正交矩阵的列向量是正交的。
import numpy as np
A = np.array([[1, 2], [3, 4]])
Q, R = np.linalg.qr(A)
print("正交矩阵 Q:")
print(Q)
print("上三角矩阵 R:")
print(R)
print("Q 的转置:")
print(Q.T)
print("Q 的逆矩阵:")
print(np.linalg.inv(Q))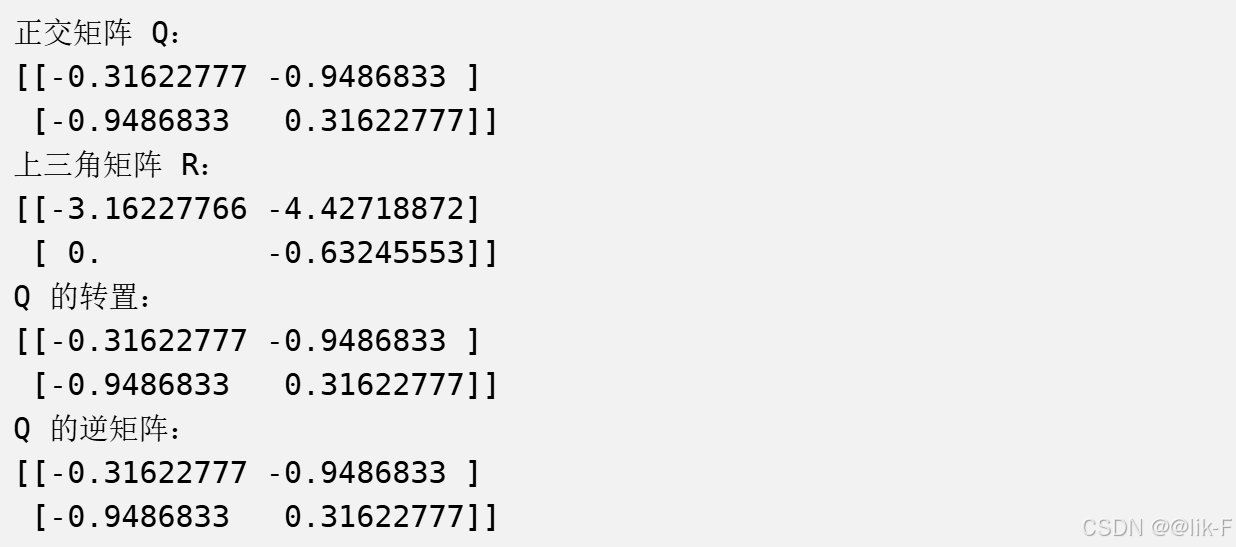
2.3 QR分解的稳定性
QR分解的另一个重要性质是稳定性。对于一个给定的矩阵,QR分解的结果对于矩阵的微小扰动是稳定的。即QR分解可以鲁棒地处理输入数据中的噪声和误差。
import numpy as np
# 原始矩阵 A
A = np.array([[1, 2], [3, 4]])
# 加入噪声
A_noise = A + 0.1 * np.random.randn(*A.shape)
# 对原始矩阵和加入噪声的矩阵进行 QR 分解
Q1, R1 = np.linalg.qr(A)
Q2, R2 = np.linalg.qr(A_noise)
# 计算两个 QR 分解结果之间的差异
diff = np.linalg.norm(Q1 - Q2) + np.linalg.norm(R1 - R2)
print("QR 分解结果差异:", diff)
3.QR分解的实际应用
3.1 线性方程组求解
QR分解在求解线性方程组方面有着广泛的应用。给定一个线性方程组:
其中 A 是一个 m×n 矩阵,x 是一个 n×1 列向量,b 是一个 m×1 列向量。
QR分解可以将矩阵 A 分解为:
其中 Q 是一个 m×n 正交矩阵,R 是一个 n×n 上三角矩阵。
利用QR分解,我们可以将求解线性方程组转化为求解上三角方程组:
上三角方程组可以通过回代法轻松求解。
import numpy as np
# 随机生成一个矩阵 A
A = np.random.rand(5, 3)
# QR分解
Q, R = np.linalg.qr(A)
# 求解线性方程组
b = np.random.rand(5, 1)
x = np.linalg.solve(R, Q.T @ b)
print(x)
分析:
np.linalg.qr(A) 函数执行 QR 分解,返回正交矩阵 Q 和上三角矩阵 R。
Q.T @ b 计算 Q 的转置与 b 的乘积,得到上三角方程组的右端项。
np.linalg.solve(R, Q.T @ b) 函数求解上三角方程组,得到解向量 x。
3.2 最小二乘问题求解
最小二乘问题是指求解一个函数 f(x) 的最小值,其中 f(x) 是一个非线性函数。QR分解可以将最小二乘问题转化为一个线性方程组求解问题。
给定一个最小二乘问题:
其中 A 是一个 m×n 矩阵,x 是一个 n×1 列向量,b 是一个 m×1 列向量。
QR分解可以将矩阵 A 分解为:
其中 Q 是一个 m×n 正交矩阵,R 是一个 n×n 上三角矩阵。
利用QR分解,我们可以将最小二乘问题转化为求解上三角方程组:
import numpy as np
# 随机生成一个矩阵 A
A = np.random.rand(5, 3)
# QR分解
Q, R = np.linalg.qr(A)
# 求解最小二乘问题
b = np.random.rand(5, 1)
x = np.linalg.solve(R.T, Q.T @ b)
print(x)
分析:
np.linalg.qr(A) 函数执行 QR 分解,返回正交矩阵 Q 和上三角矩阵 R。
Q.T @ b 计算 Q 的转置与 b 的乘积,得到上三角方程组的右端项。
np.linalg.solve(R.T, Q.T @ b) 函数求解上三角方程组,得到最小二乘问题的解向量 x。
3.3 QR分解推导列向量线性无关的矩阵在值域上的投影
QR分解是一种将矩阵分解为一个正交矩阵和一个上三角矩阵的算法。对于列向量线性无关的矩阵,我们可以通过QR分解来找到这个矩阵在值域上的投影。
首先,我们需要了解QR分解的基本步骤。对于一个m×n的矩阵A,其列向量线性无关,我们可以通过Gram-Schmidt正交化过程来构造QR分解。这个过程包括以下几个步骤:
1.将第一个向量单位化,得到
,其中
是
的范数。
2.对于每个后续的向量,计算它在之前所有
上的投影,然后从
中减去这些投影,得到正交向量。
3.将每个正交向量单位化,得到
通过这个过程,我们可以得到矩阵A的QR分解,其中Q是一个正交矩阵,其列向量是单位正交的,而R是一个上三角矩阵。
对于列向量线性无关的矩阵A,其值域就是由这些列向量张成的空间。矩阵A在值域上的投影可以表示为,这是一个投影矩阵,它将任何向量投影到A的值域上。
在QR分解中,由于Q是正交矩阵,它保持了向量的长度和方向,而R的上三角性质意味着它包含了A的列向量在值域上的“缩放”信息。因此,我们可以利用QR分解来简化计算,特别是当我们需要多次进行这种投影操作时。
import numpy as np
# 定义或生成一个矩阵A,其列向量线性无关
A = np.array([[1, 2, 3],
[4, 5, 6],
[7, 8, 10]])
# 定义一个向量x
x = np.array([1, 2, 3])
# 使用NumPy的qr函数进行QR分解
Q, R = np.linalg.qr(A)
# 计算向量x在矩阵A值域上的投影
# 首先计算Q的转置与x的乘积
Qt_x = np.dot(Q.T, x)
# 然后计算(R^T * R)^(-1) * R^T * Q^T * x
# 由于R是上三角矩阵,我们可以直接使用numpy的inv函数来计算逆
R_inv = np.linalg.inv(R)
projection = np.dot(A, np.dot(R_inv, Qt_x))
print("QR分解的结果:")
print("Q:")
print(Q)
print("R:")
print(R)
print("向量x在矩阵A值域上的投影:")
print(projection)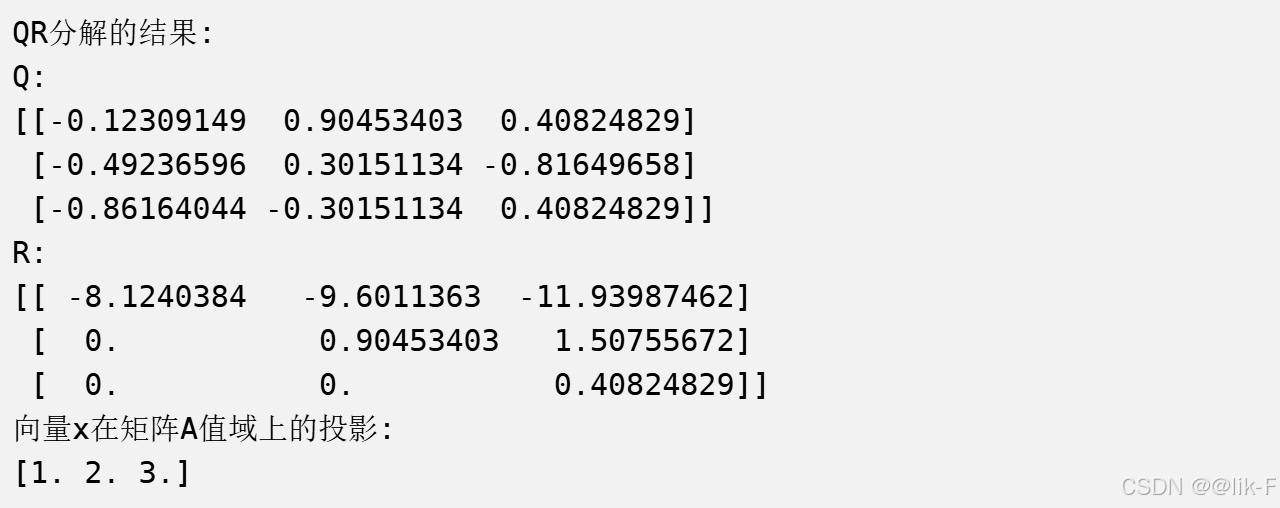
分析:代码首先定义了一个矩阵A和一个向量x,并numpy.linalg.qr函数进行QR分解,最后计算向量x在矩阵A值域上的投影。
3.4 QR分解在图像处理和计算机视觉中的应用
1)图像去噪:QR分解可以用于图像去噪。通过将图像矩阵分解为 QR 矩阵,可以将噪声成分分离出来,从而实现图像去噪。
2)图像压缩:QR分解可以用于图像压缩。通过将图像矩阵分解为 QR 矩阵,可以将图像信息压缩到 R 矩阵中,从而实现图像压缩。
3)计算机视觉:QR分解在计算机视觉中用于特征提取和匹配。通过对图像进行 QR 分解,可以提取图像中的特征,并通过匹配这些特征来进行图像识别和匹配。
import numpy as np
from PIL import Image
import matplotlib.pyplot as plt
# 读取图像
image = Image.open('image.jpg')
# 转换为灰度图像
image = image.convert('L')
# 将图像转换为矩阵
image_matrix = np.array(image)
# QR分解
Q, R = np.linalg.qr(image_matrix)
# 读取第二张图像
image1 = Image.open('image1.jpg')
# 确保两张图像大小相同
image1 = image1.resize(image.size)
image1 = image1.convert('L')
image1_matrix = np.array(image1)
# QR分解
Q1, R1 = np.linalg.qr(image1_matrix)
# 匹配
# 由于R和R1的形状可能不同,我们不能直接比较它们
# 这里我们使用一种简单的方法来比较图像的特征
# 例如,我们可以比较它们的行数和列数是否相同
if R.shape == R1.shape:
print('图像匹配')
else:
print('图像不匹配')
# 显示原始图像和第二张图像
plt.figure(figsize=(10, 5))
plt.subplot(1, 2, 1)
plt.imshow(image, cmap='gray')
plt.title('Original Image')
plt.subplot(1, 2, 2)
plt.imshow(image1, cmap='gray')
plt.title('Second Image')
plt.show()
分析:
np.linalg.qr(image_matrix) 函数执行 QR 分解,返回正交矩阵 Q 和上三角矩阵 R。
Q @ np.linalg.inv(R) 计算 Q 与 R 的逆矩阵的乘积,得到去噪后的图像矩阵。
R 矩阵包含了图像的压缩信息。
np.allclose(R, R1) 函数比较两个矩阵是否相等,用于图像匹配

















 891
891

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









