







一 雪崩现象
一致性哈希算法是分布式系统中常用的算法。比如,一个分布式的存储系统,要将数据存储到具体的节点上,如果采用普通的hash方法,将数据映射到具体的节点上,如key%N,key是数据的key,N是机器节点数,如果有一个机器加入或退出这个集群,则所有的数据映射都无效了,如果是持久化存储则要做数据迁移,如果是分布式缓存,则其他缓存就失效了。
因此,引入了一致性哈希算法:
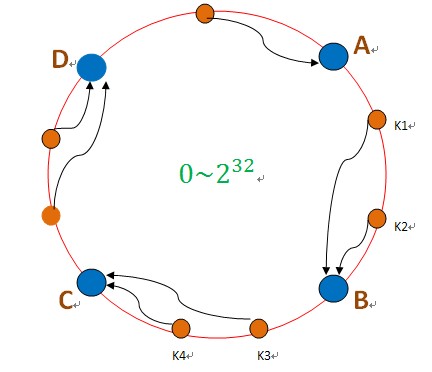
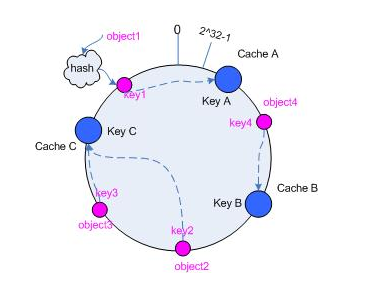
把数据用hash函数(如MD5),映射到一个很大的空间里,如图所示。数据的存储时,先得到一个hash值,对应到这个环中的每个位置,如k1对应到了图中所示的位置,然后沿顺时针找到一个机器节点B,将k1存储到B这个节点中。
如果B节点宕机了,则B上的数据就会落到C节点上,如下图所示:
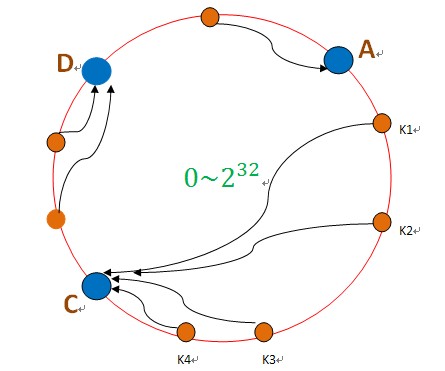
这样,只会影响C节点,对其他的节点A,D的数据不会造成影响。然而,这又会造成一个“雪崩”的情况,即C节点由于承担了B节点的数据,所以C节点的负载会变高,C节点很容易也宕机,这样依次下去,这样造成整个集群都挂了。
为此,引入了“虚拟节点”的概念:即把想象在这个环上有很多“虚拟节点”,数据的存储是沿着环的顺时针方向找一个虚拟节点,每个虚拟节点都会关联到一个真实节点,如下图所使用:
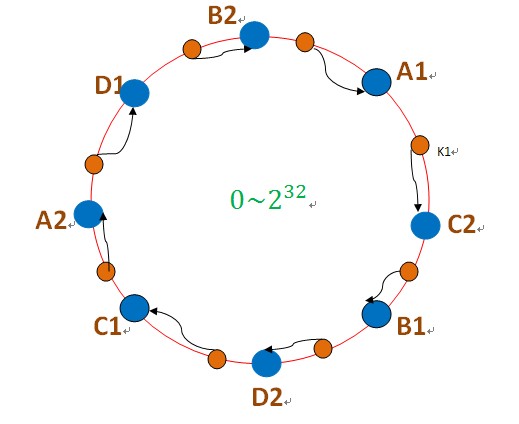
图中的A1、A2、B1、B2、C1、C2、D1、D2都是虚拟节点,机器A负载存储A1、A2的数据,机器B负载存储B1、B2的数据,机器C负载存储C1、C2的数据。由于这些虚拟节点数量很多,均匀分布,因此不会造成“雪崩”现象。
二 关键理解
一致性哈希,简单的说在移除 / 添加一个 cache 时,它能够尽可能小的改变已存在 key 映射关系,尽可能的满足单调性的要求。重点说一下最常见的实现方式。
Java中采用md5散列的方式,计算hash值,这样基本上能保证key散列出啦的hash不会重复。

- private static long md5HashingAlg(String key) {
- MessageDigest md5 = MD5.get();
- md5.reset();
- md5.update(key.getBytes());
- byte[] bKey = md5.digest();
- long res = ((long) (bKey[3] & 0xFF) << 24) | ((long) (bKey[2] & 0xFF) << 16) | ((long) (bKey[1] & 0xFF) << 8)| (long) (bKey[0] & 0xFF);
- return res;
- }
在对server节点初始化的时候,为了避免节点过少数据分布不均匀,都会初始化一些虚拟节点。具体方法上面计算hash值的方式类同,一把采用根据权重虚拟出来一些key,具体不过多介绍。
一致性哈希算法中,把哈希值想象成一个环状。有关一致性哈希算法,介绍里面说0~2^32-1的数据,不要误以为哈希环要保存2^32个数据。他只是说,哈希环存的key的哈希值范围是0~2^32-1,并不是key的哈希值要覆盖0~2^32-1所有数据。
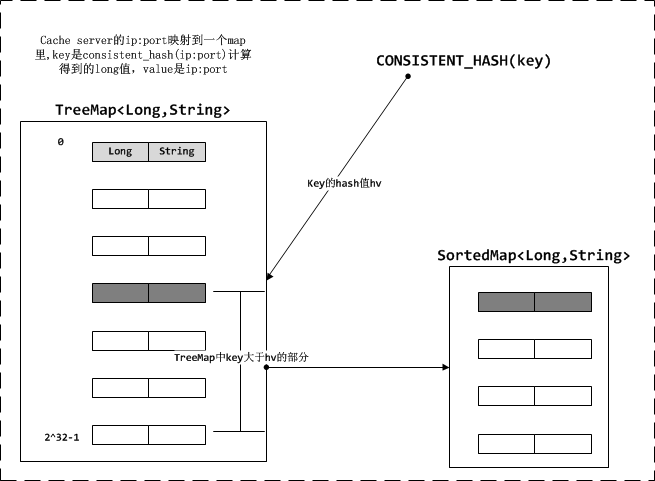
既要保存hash值,又要保存对应的节点地址,貌似最简单的就是map,在Java中没有什么map可以满足是个环状。那就找一个排序的,0开头,2^32-1做尾。查找时查到尾没有结果,再返回头找这样可以理解为是个环状了。
在初始化的时候,把节点的hash和节点地址保存在TreeMap里,client查找时,根据key的hash值去treeMap得到自己应该查询的节点,往下查找比自己hash值大的,如果有则得到结果返回。如果没有,则回到treeMap的头,取第一个返回结果。
如图中所示:根据key计算出hash,去treeMap查找比key哈希大的那部分,取出第一个值就是结果。如果没有别key哈希大的部分,则取treeMap的第一个值。
代码的实现:
- private final Long findPointFor(Long hv) {
- SortedMap<Long, String> tmap = this.consistentBuckets.tailMap(hv);
- return (tmap.isEmpty()) ? this.consistentBuckets.firstKey() : tmap.firstKey();
三 Jedis中一致性哈希的实现:
[java] view plaincopyprint?
public class Shard<S> { // S类封装了机器节点的信息 ,如name、password、ip、port等
private TreeMap<Long, S> nodes; // 虚拟节点
private List<S> shards; // 真实机器节点
private final int NODE_NUM = 100; // 每个机器节点关联的虚拟节点个数
public Shard(List<S> shards) {
super();
this.shards = shards;
init();
}
private void init() { // 初始化一致性hash环
nodes = new TreeMap<Long, S>();
for (int i = 0; i != shards.size(); ++i) { // 每个真实机器节点都需要关联虚拟节点
final S shardInfo = shards.get(i);
for (int n = 0; n < NODE_NUM; n++)
// 一个真实机器节点关联NODE_NUM个虚拟节点
nodes.put(hash("SHARD-" + i + "-NODE-" + n), shardInfo);
}
}
public S getShardInfo(String key) {
SortedMap<Long, S> tail = nodes.tailMap(hash(key)); // 沿环的顺时针找到一个虚拟节点
if (tail.size() == 0) {
return nodes.get(nodes.firstKey());
}
return tail.get(tail.firstKey()); // 返回该虚拟节点对应的真实机器节点的信息
}
/**
* MurMurHash算法,是非加密HASH算法,性能很高,
* 比传统的CRC32,MD5,SHA-1(这两个算法都是加密HASH算法,复杂度本身就很高,带来的性能上的损害也不可避免)
* 等HASH算法要快很多,而且据说这个算法的碰撞率很低.
* http://murmurhash.googlepages.com/
*/
private Long hash(String key) {
ByteBuffer buf = ByteBuffer.wrap(key.getBytes());
int seed = 0x1234ABCD;
ByteOrder byteOrder = buf.order();
buf.order(ByteOrder.LITTLE_ENDIAN);
long m = 0xc6a4a7935bd1e995L;
int r = 47;
long h = seed ^ (buf.remaining() * m);
long k;
while (buf.remaining() >= 8) {
k = buf.getLong();
k *= m;
k ^= k >>> r;
k *= m;
h ^= k;
h *= m;
}
if (buf.remaining() > 0) {
ByteBuffer finish = ByteBuffer.allocate(8).order(
ByteOrder.LITTLE_ENDIAN);
// for big-endian version, do this first:
// finish.position(8-buf.remaining());
finish.put(buf).rewind();
h ^= finish.getLong();
h *= m;
}
h ^= h >>> r;
h *= m;
h ^= h >>> r;
buf.order(byteOrder);
return h;
}
} 四 一致性哈希算法的优化----关于如何保正在环中增加新节点时,命中率不受影响
我们知道,在没有对数据做冗余存储的情况下,无论是一致性哈希还是求余数分布式算法,在新增或删除memcached节点时,命中率都会不同程度的降低。
本文旨在解决当新增redis节点时,如何保证命中率不变。
基本原理
当新增一个redis节点时,将该新节点的下一个节点的且属于该新节点的数据迁移过来。
原理描述
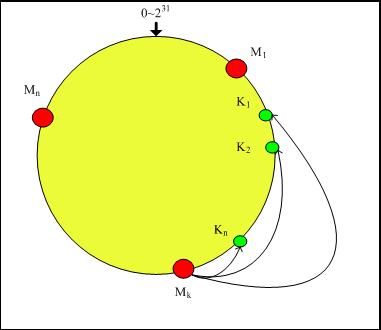
如图1所示,假设当前哈希环上有n个memcached节点,记为M1~Mn,存储到这些节点上的数据的有效期都是一致的,记为Te。
因此从图1可以看出,从M1到Mk区间的数据均从Mk上存取。比如数据K1,K2,Kn。
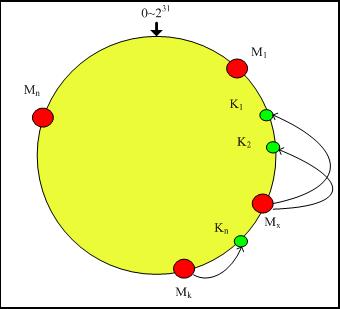
当新增节点Mx时,如图2所示。
此时数据K1,K2从新节点Mx读取不到的,但节点Mk存储了这些数据,我们需要做的就是将这些数据迁移到新节点Mx。
具体做法是:
将新加入的节点Mx标记为N(New)状态,表示该节点是新增的。在N状态下读取数据K1的步骤为:
1)从Mx读取数据,如果读取得到,则返回,否则进行2);
2)从Mk读取数据,如果读取不到,则返回,否则进行3);
3)将读取到的数据K1写入Mx;
4)将K1从Mk删除;
在New状态下,不断进行上面的4个步骤;
因为数据的有效期是Te,所以在经过Te时间后,Mk上的数据随之自动失效了,此时将Mx标记为O(Old)状态,在O状态下,如果读取不到数据也立即返回,无需再次到它下一个节点尝试读取。
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









