






 本博客翻译了轨道车辆领域主动控制方案的论文,介绍了主动悬挂基本概念和分类,重点阐述主动一系悬挂中独立旋转车轮的原理、配置、控制策略及应用案例。指出主动悬挂技术虽有进展但未广泛应用,未来需关注成本效益、容错设计、执行器尺寸及控制算法等问题。
本博客翻译了轨道车辆领域主动控制方案的论文,介绍了主动悬挂基本概念和分类,重点阐述主动一系悬挂中独立旋转车轮的原理、配置、控制策略及应用案例。指出主动悬挂技术虽有进展但未广泛应用,未来需关注成本效益、容错设计、执行器尺寸及控制算法等问题。
写在前面
发表于Rail. Eng. Science的Active suspension in railway vehicles: a literature survey一文,全面总结了2020年之前轨道车辆领域主动控制方案的各种重要实现。本博客是对论文原文的忠实翻译。由于论文较长,因此将其拆分为若干篇博客分别进行翻译和注释。这是系列翻译的第五篇,上一篇为《轨道车辆中的主动悬挂:文献综述(四)》。
论文翻译
1 引言
2 主动悬挂的基本概念和分类
3 摆式列车
4 主动二系悬挂
5 主动一系悬挂
5.1 刚性轮对与独立旋转车轮
5.2 刚性轮对的主动一系悬挂
5.3 独立旋转车轮
除了为刚性轮对实施主动一系悬挂外,独立旋转车轮是克服运行稳定性和曲线行驶性能之间众所周知的权衡问题的另一种解决方案。与刚性轮对相比,轮对配置的变化使得同一轴上的车轮可以相互独立旋转。通过这种方式,轮对的摇头和横向运动之间的依赖性被消除,从而在轮轨接触界面几乎消除了纵向蠕滑力。因此,纯滚动不再依赖于轮对的横向位置,这显著减少了磨损,并且抑制了蛇行运动(Goodall和Mei[122]以及Perez等人[123])。另外,如果考虑与IRWs一起使用两轴铁路车辆,如Kurzeck和Valente[124]在“下一代列车”(NGT)项目中所描述的那样,可以实现双层列车组配置,具有连续的低地板。IRW的首次应用是1941年由Talgo提出的,其中通过车轮之间的连杆实现了被动转向能力[106]。Talgo的第一个解决方案如图28所示。IRWs也应用于低速应用,如有轨电车[125]。

图 28 Talgo在1941年时独立旋转车轮的结构方案
然而,当去除车轮之间的约束时,会产生一些缺点。车轮之间耦合的缺失导致失去自导向能力[122, 123],最终会导致轮缘导向。Goodall和Mei[122]通过使用两轴车辆的线性化模型进一步证明了IRWs配置仍然存在动态不稳定性。此外,轮轨纵向蠕滑力无法完全消除,仍然可能影响轮对的稳定性[126, 127]。Mei和Goodall首次引入了IRW的主动控制解决方案[3, 92]。缺乏自引导能力和动态不稳定性的风险将导致糟糕的乘坐体验、噪音和磨损,并且必须得到解决,无论是通过Talgo的被动设计还是通过主动控制。Mei和Goodall [92]、Goodall和Mei [122]以及Gretzschel和Bose [128]在文献中明确指出了这一点。
为了实现导向和稳定性,可以使用不同类型的IRW的机电配置。如Bruni等人[4, 129]所定义,且随后被作为定义采纳,可以将与IRWs相关的主动一系悬挂分为三个主要类别:AIRW [92]、DIRW [128]和DSW [130]。其他被动设计,包括Talgo的方案,以及差动耦合轮对(differential
coupling wheelset)[131]、apparently independently rotating wheels[132]、反踏面锥度(inverse tread conicity)[133]),都不在本文讨论范围内。
5.3.1 原理和配置
(a) 主动径向独立旋转车轮(Actuated independently rotating wheel, AIRW)
AIRW的概念(图29)基于控制独立旋转车轮所安装的公共轴上的摇头和横向位移的可能性,可以通过对轴直接施加扭矩来实现(Goodall等人[122, 134, 135]和Mei等人[136]),或使用线性执行器(Perez等人[123, 137])。图29展示了这最后一种可能性。Mei等人[8]展示了使用MR阻尼器的半主动方法。使用两轴线性模型,Mei和Goodall[92]证明了AIRW所需的转向扭矩低于刚性轴车辆,因为AIRW较早地达到纵向蠕滑力为零的状态(early zero longitudinal creep forces)。Perez等人[137]提出了AIRW和DIRW的组合。
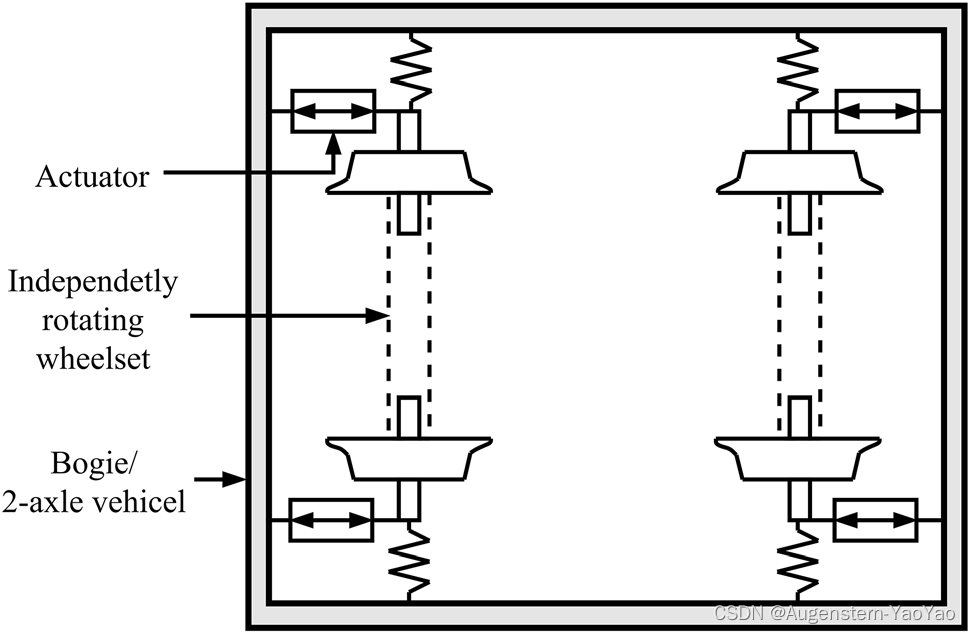
图 29 主动径向独立旋转车轮
(b) 驱动式独立旋转车轮(Driven independently rotating wheel, DIRW)
DIRW的概念(图30)基于控制一个轴上两个车轮的速度的可能性。首先,通过电机伺服电机提供的差动扭矩通过连接两个车轮的齿轮箱实现(Gretzschel等人[128, 138])。最近,由于异步感应电机控制方法的进步,为每个车轮分配一个交流电机。这些电机用于提供牵引力、车轮引导和稳定性控制。电机可以外部安装并通过齿轮箱连接到轮对(Perez等人[137],Liang等人[139, 140],Ahn等人[141],Lu等人[142]和Farhat等人[98, 143]),如图30所示,或安装在车轮内部(Mei等人[144],Ji等人[145]以及在“下一代列车”项目中[124],[146-149])。无需额外执行器的缺失降低了轮对框架(wheelset frame)所需空间,并且可以在同一系统内提供牵引和控制,从而降低成本并提高可靠性。因此,DIRW解决方案非常有吸引力,并且近年来一直是广泛研究的对象。
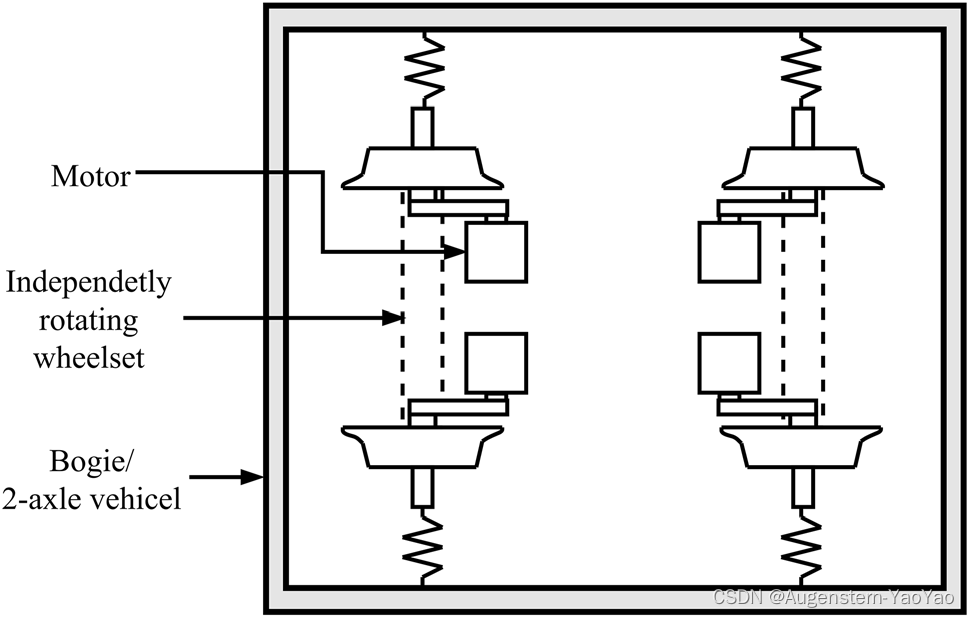
图 30 驱动式独立旋转车轮
(c) 直接导向车轮(Directly steered wheels, DSW)
DSW的概念(图31)去除了车轮之间的公共轴,取而代之的是一个副车架,两个车轮通过转向杆连接在此车架上。通过这种方式,两个车轮可以直接转向。可以通过对转向杆施加位移来提供控制输入(actuation)(Aknin等人[130]和Wickens在[150], [151]中),如图31所示,或通过轮毂安装的牵引电机施加差动扭矩(Powell在[152]中)。Michitsuji等人[153–155]展示了一种具有自导向能力的DSW配置。Wickens在[151]中还展示了,通过主动控制实现的稳定性问题受到摩擦和牵引的影响较小。然而,这个想法是研究较少的之一。
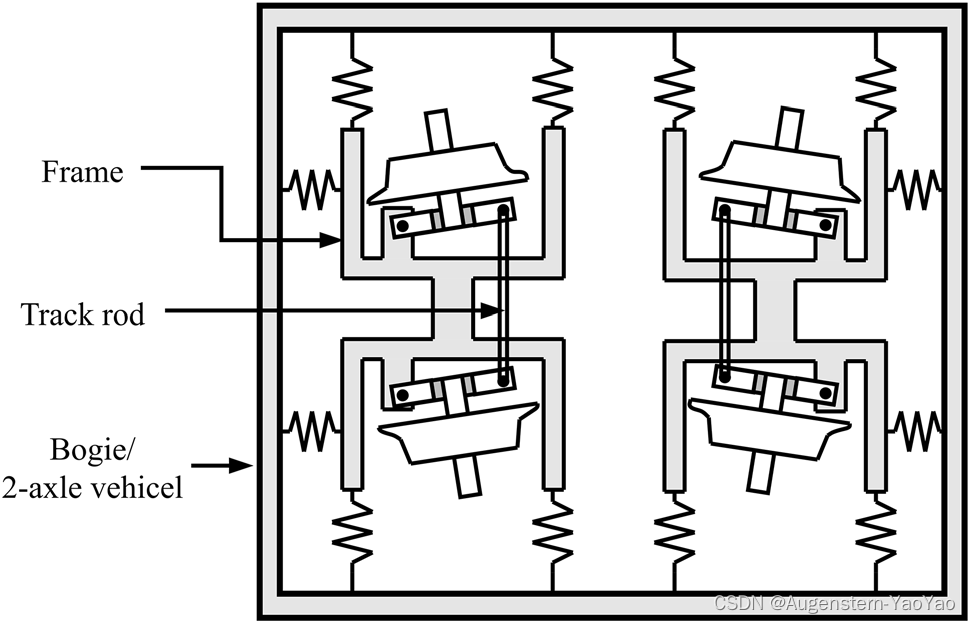
图 31 直接导向车轮
5.3.2 稳定性和导向的控制策略 Control strategies for stability and guidance
在本节中,讨论了为解决稳定性和导向问题而提出的控制策略,从(a)稳定性控制和(b)导向控制的角度来看。
(a) 稳定性控制 Stability control
稳定性控制旨在通过减少可能发生的不稳定轮对运动来提高车辆的运行速度。如有必要,在IRW中,需要将稳定性控制与导向控制结合使用。正如上文所提到的,由于IRW缺乏自动对中的机制,当缺少被动解决方案时,强烈建议使用主动引导控制。
稳定性问题在去除纵向悬挂时尤其明显。尽管AIRW和DIRW可以共享一些控制策略,但这对DSW通常不适用,因为DSW具有其特殊性。
a.1 差动摇头角速度反馈 Differential yaw rate feedback
摇头角速度差方法用于IRW稳定性,主要用于AIRW。然而,它也可以应用于不同类型的IRW。这种方法由Goodall和Mei[122]引入。在这里,通过反馈轮对与转向架/车体的摇头角速度差,系统中主动引入了每个轮对的摇头阻尼。这种选择是为了简化概念实施中的传感问题。此外,在他的研究中,Goodall提出了根据列车速度调整控制力的想法[122], [135]。随后,Mei和Goodall在[134]中开发了一种基于上述概念的H∞控制,使用μ-综合,以克服参数变化、未建模的执行器动态以及描述真实列车复杂性的简单模型的问题。这一概念后来由Mei等人[8]进一步研究。使用MR阻尼器的半主动方法,观察到所需的控制力比用于具有相同控制目标的刚性轮对所需的力度要低得多。此外,只有与控制力同相的反馈信号可以考虑[135]。在Perez等人的工作中[123, 137],稳定性问题不太严重,因为考虑了带有纵向悬挂的常规转向架车辆。
a.2 绝对摇头角速度反馈 Absolute yaw rate feedback
通过控制两个车轮的旋转速度,使用共同齿轮箱或独立车轮电机提供的差动扭矩,绝对摇头角速度反馈为DIRW提供稳定性。这一方法首先由Gretzschel等人[128, 138]提出。在这项工作中,同时考虑了稳定性和导向。前轴的摇头角速度以及前后轴的横向位移反馈到一个共同的PID控制器中,该控制器设置了转向电机通过连接同一轴上两个车轮的齿轮箱所产生的扭矩的方向和大小。Liu等人[156]研究了相同的方法,其中使用级联PID控制器而不是集成的PID方法。在这里,每个轮对由一个单独的级联控制方案控制,并且应用差动扭矩控制而不是共同齿轮箱。
a.3 绝对摇头角刚度 Absolute yaw stiffness
绝对摇头角刚度旨在通过反馈摇头角度主动引入角刚度,增加IRW的稳定性。这种方法依赖于测量摇头角的可能性,这在实际应用中可能不可行。Mei等人[144]为DIRW引入了绝对偏航刚度,其中使用了嵌入轮内的永磁同步电机。通过两个电机产生的差动扭矩实现了期望的偏航刚度。摇头角的测量经过高通滤波,以只影响运动行为,不干扰准静态行为,如导向和曲线行为。基于相同原则,Liang和Iwnicki[139, 140]在测试台上测试了该控制的稳定性,并与模拟结果进行了比较。
a.4 DSW
在DSW配置中,如Wickens在文献[150, 151]中所示,稳定性是通过简单地应用具有较大速度稳定性余量的导向控制来实现的。在[151]中,Wickens比较了传统被动车辆、yaw relaxation control、ASW和DSW的稳定性极限,显示只有DSW配置对速度和等效锥度变化不存在稳定性极限。
以上提到的稳定性控制方案的比较总结在表4中。

(b) 导向和转向控制 Guidance and steering control
在考虑IRW的高速应用以及缺乏被动解决方案的情况下,导向控制是必要的,尤其是考虑到AIRW和DIRW。如前所述,导向控制旨在主动恢复自转向机制并提供转向能力。通常,导向控制与稳定性控制一起应用。如稳定性控制部分所述,DSW配置依赖于与其他两种配置不同的方法。事实上,一般更倾向于对DSW采用机械配置以恢复自对中能力。
b.1 轮速相等 Equal wheels speed
控制两个车轮以相同的速度运行将模拟刚性轮对的行为。这样,导向和自对中机制得以恢复,尽管可能面临影响刚性轮对的同样问题。Goodall等人[122, 135]提出了这种方法用于AIRW。外部执行器将IRW轮对引导至两个车轮的速度差为零。同样也引入了适应性问题。如稳定性部分所述,随后在[134]中开发了使用μ-综合的H∞控制。对于DIRW,可以使用相同的方法,其中通过车轮电机直接控制车轮速度差异。Ji等人[145]研究了同步电机控制精度与轮轨间距之间的依赖性,提出了优化的踏面廓形以减少这种依赖性。引入了同步电机模型,考虑了由不均匀磁场和定子高次谐波电流产生的转矩波动。Liu等人[156]将绝对摇头角速度反馈(1.b)与轮速相等控制结合在级联PID控制中。发现当应用级联控制时,与单独应用轮速相等控制相比,车辆的运行品质有所改善。
b.2 非零横向间距 Nonzero lateral clearance
关于AIRW,Perez等人[123, 137]提出了恢复导向的方法。为了避免轮缘接触,将横向间距设为零。由于难以测量轮对相对于轨道中心线的横向位移,因此根据轨道的曲率和列车的速度派生出车轮速度差的参考信号。参考值从描述系统的动力学方程中获得。发现车轮速度差与其他变量的关系可以用一个具有低时间常数的一阶传递函数表示,允许在导向控制的频率范围内忽略这一贡献。然后,通过考虑曲线行驶过程中的准静态条件,进一步简化了关系。最终所做的简化导致获得的横向位移与中心线相比出现误差。
b.3 零横向间距 Zero lateral clearance
零横向间距的替代方法通常被应用。在这里,控制IRW位于轨道中心线上,因此具有零横向间距。这种方法涉及测量轮对的横向位移或使用估计算法的必要性。这种方法通常应用于DIRW,其中可能引入额外的反馈变量。在“下一代列车”项目中,Kurzeck等人[146]使用PD控制实现了零横向间距方法。在他的研究中,Kurzeck关注了由于轨道不平顺性引起的峰值扭矩和功率需求。他引入了一个扭矩限制器,并使用模式搜索优化来调整控制器,目的是减少曲线轨道不规则性下的磨损。Ahn等人[141]使用相同的控制方法,但专注于同步电机控制,在1:5比例的测试台架上成功展示了这种控制方案的有效性。Grether[147]引入了前馈动作,以补偿过渡曲线中引入的绕轴运动(gyroscopic moment)。Heckmann等人[148]将这个概念与轮对的横向位移、摇头角和摇头角速度的反馈控制结合使用。在他的工作中,Heckmann还引入了一种基于车辆速度的增益调度(gain-scheduling)方法,以避免可能由速度变化引起的控制不稳定。Grether等人[149]随后实施了一种先行控制(preceding control),以改善后轮对的性能。利用前部转向架的信息进行后部转向架的高级控制,从而在磨损数方面进一步改善。
Lu等人[142]使用IRW轮对的横向位移和偏摆角作为反馈,开发了一种基于μ-综合的鲁棒扭矩控制。为了降低模型的复杂性,该控制仅基于IRW轮对模型,将转向架力和扭矩作为外部输入。然后在1:5比例的测试台架上对仿真结果进行了实验验证。
Farhat等人[98]提出了对ASW、SYC和零横向间距控制的DRIW的控制性能进行比较。模拟显示,在研究的情况下,DIRW的性能优于其他解决方案。特别是,SYC是最不利的方法。然而,Farhat等人[143]指出,在道岔(diverging route of switches)上,尤其是高速道岔(high-speed switches),与标准固定轮对相比,性能可能会下降。不过,这并不适用于直行路线。
b.4 差分牵引控制 Differential traction control
通过结合AIRW和DIRW的概念,Perez等人[137]提供了AIRW概念的导向和DIRW概念的导向。为了方便AIRW部分的导向算法,DIRW部分控制两个车轮的被施加的扭矩相等。这样,左右车轮的接触力被虚拟地保持平等。在[137]中,引入了同步电机的动态模型。采用了场绕组和电枢绕组方程的分离方法,并在考虑场电流恒定的情况下设计了控制。
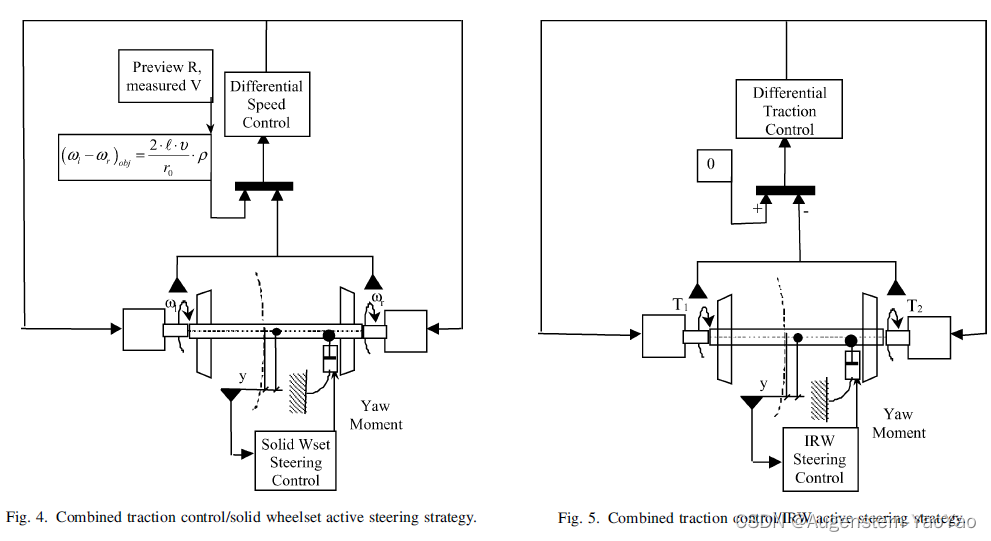
补充示意图:Combined traction control / (solid-wheelset/IRW) active steering strategy,原文没有此图。
b.5 DSW
在DSW上,首先由Wickens在[150]中提出了导向方法,其中车轮通过与追踪误差成比例的角度来进行导向。追踪误差定义为车辆位置相对于轨道中心线的偏差。随后,Michitsuji和Suda在[153]中引入了具有自转向能力的被动转向架。在这里,为了在过渡曲线期间改善车辆行为,引入了一种前馈动作以补偿由轨道曲率的时间变化产生的干扰。这种解决方案的有效性通过模拟结果和在1:10比例测试台架上进行的实验得到了证实。
表5比较了不同导向控制的特点。

5.3.3 应用例
独立旋转车轮的控制是一个有趣的概念,与主动控制的刚性轮对相比具有潜在的优势。然而,已知的实施主要是缩放模型,[157]中描述的例外除外。
DIRW概念的首次应用是由DLR在1999年由Gretzschel和Bose[128]开发的,并在[138]中进一步发展。在图32中的1:5缩放测试台上,差动控制由一个直接安装在两个车轮之间的外部伺服电机通过齿轮箱提供。应用的缩放程序以及获得的结果在[158]中给出。
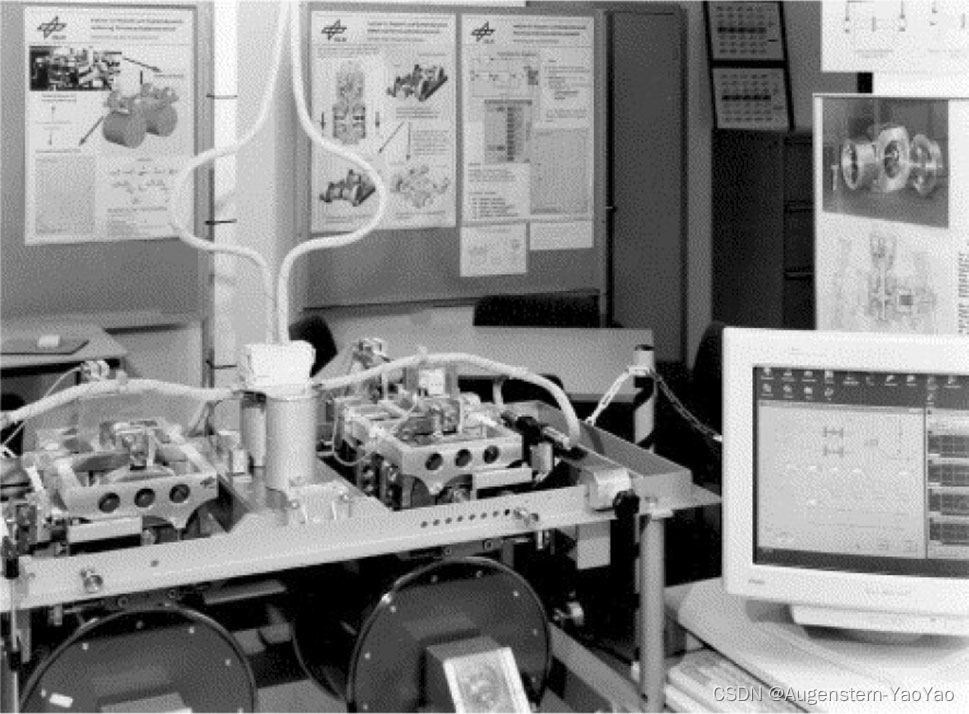
图32 第一个DIRW的1:5比例模型转向架
Liang等人[139]、[140]开发并测试了1:5缩尺轮对。考虑了直流和交流电机。只测试了交流电机。应用了等速车轮和绝对摇头角速度反馈控制。在模拟和实验之间发现了很好的结果一致性。另外,报告了测试轮对在有和没有绝对摇头角速度反馈控制的情况下的行为,显示当应用控制时有显著改进。Ahn等人[141]实施了另一个1:5缩放的测试台,代表了一个较深的地铁系统,其中应用了线性缩放。使用表面永磁同步电机,采用零横向间距策略,使用饱和PI控制器。图33显示了上述测试台。
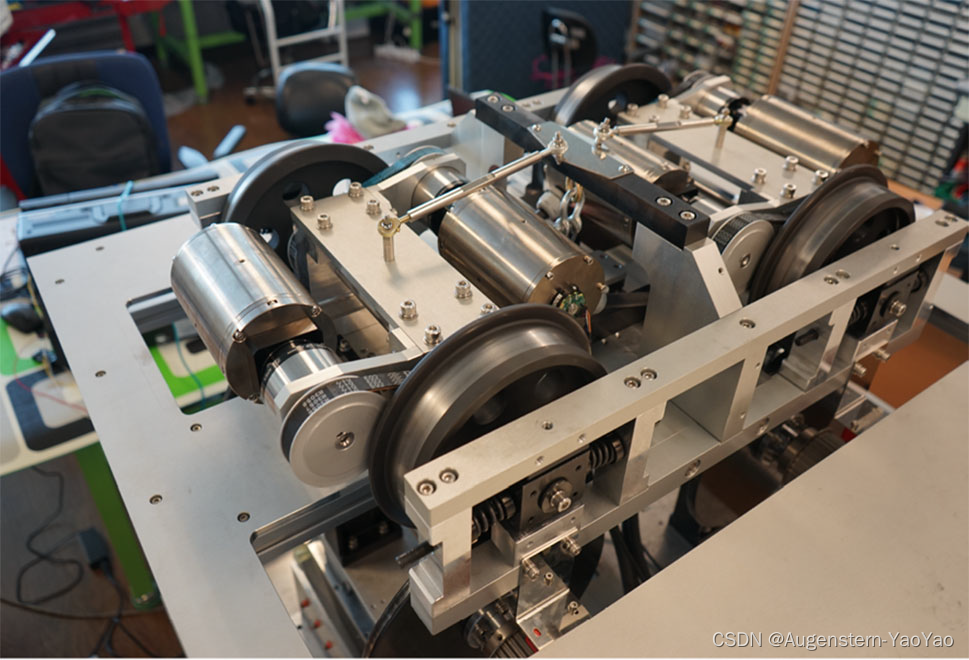
图33 1:5比例测试台,用于较深的地铁[141]
Lu等人[142]在1:5测试台上成功应用了一种鲁棒的控制方法。与大多数涉及实验IRW车辆的应用不同,缩放车辆在真实轨道上运行,轨距减小。应用了零横向间距控制,左右车轮上使用涡流位移传感器。然后使用这两个信号来估计车轮-轨道的横向位移和摇头角。图34显示了实验车辆。
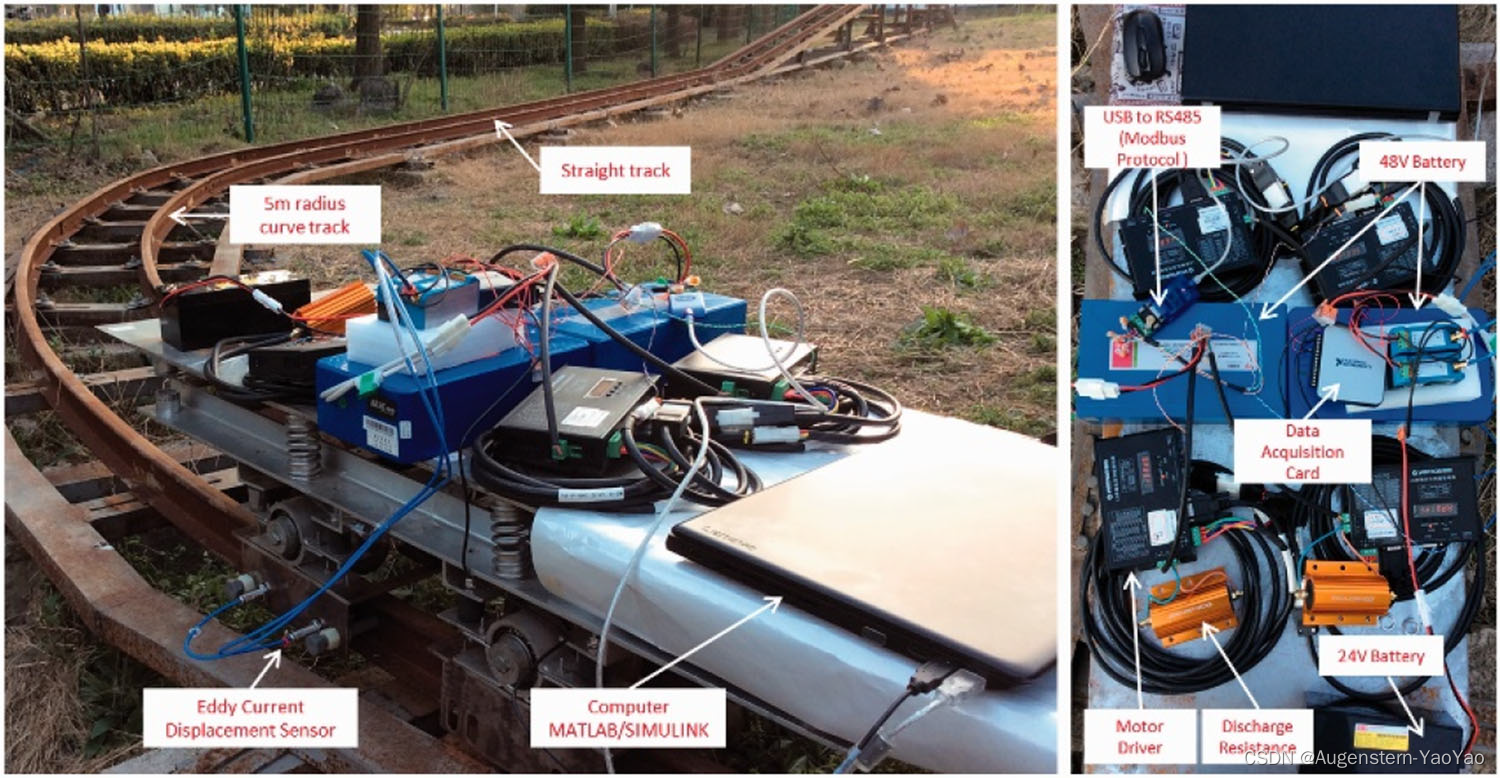
图34 在比例模型实验线路上的1:5比例小车
Oh等人[159]选择了一种不同的方法。他们没有开发车辆的缩放模型,而是使用硬件在环(HIL)方法研究全尺寸车轮电机的实时行为。使用线性车辆模型模拟车辆行为,其中也考虑了纵向动力学。模拟和车轮电机通过负载电机耦合。使用线性模型的原因是需要实时运行模型,而更复杂的非线性模型可能会导致车辆动力学计算中的时间延迟,最终阻碍HIL的实施。车辆使用零横向间距策略进行控制。图35显示了实验设置。
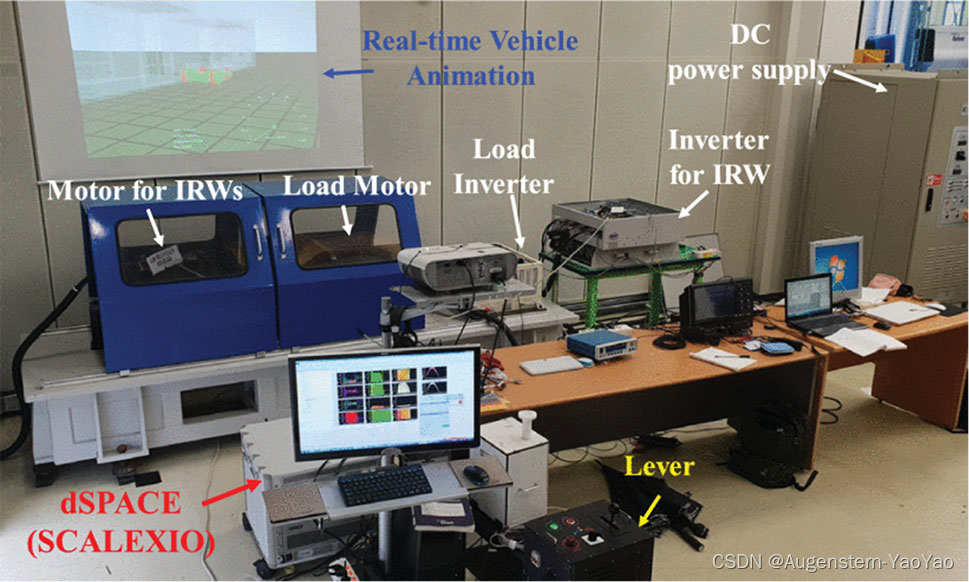
图35 硬件在环测试配置[159]
同一作者设计了车轮电机电枢绕组以提高电机性能[160, 161]。
Michitsuji等人[153]在EEF转向架的1:10缩放模型上提出了DSW的应用(图36)。该车辆在25米轨道上进行了测试,轨道上有一个3.3米半径的曲线,相当于真实轨道上非常窄的33米曲线。车辆的转向能力通过前馈控制得到改善,该控制在过渡曲线期间协助所提出设计的自转向能力。车辆在曲线的圆形部分不进行主动转向。报告了模拟和实验结果之间的满意一致性。
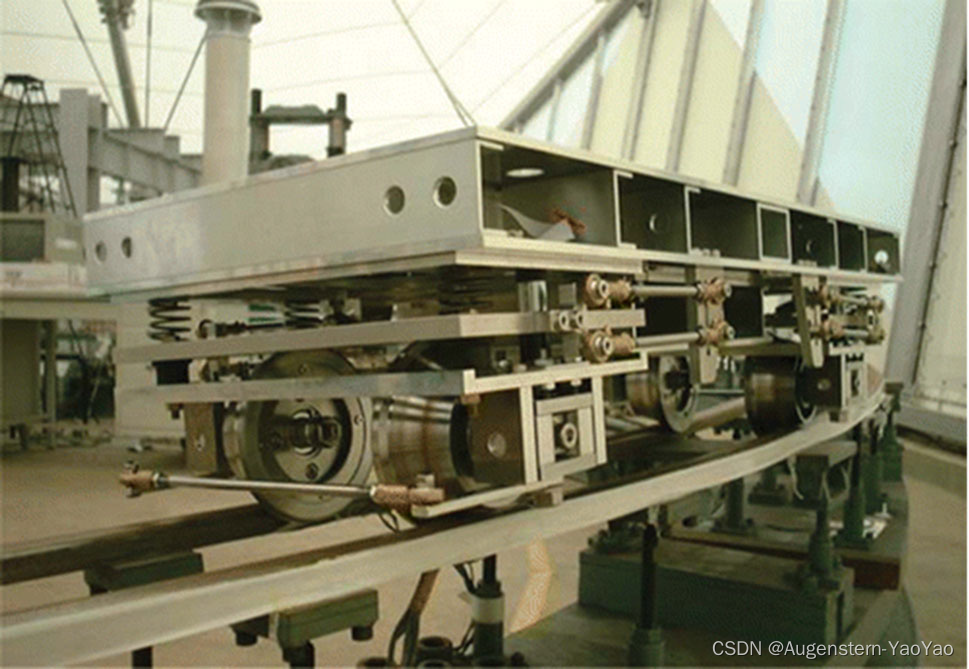
图36 EEF的1:10比例模型
6 总结与展望
铁路车辆的主动悬挂被定义为一种包含了传感器、控制器和作动器等机电技术。在过去的40年里,它已发展成为各种技术的综合体,可以在不同方面显著改善车辆的动态行为。
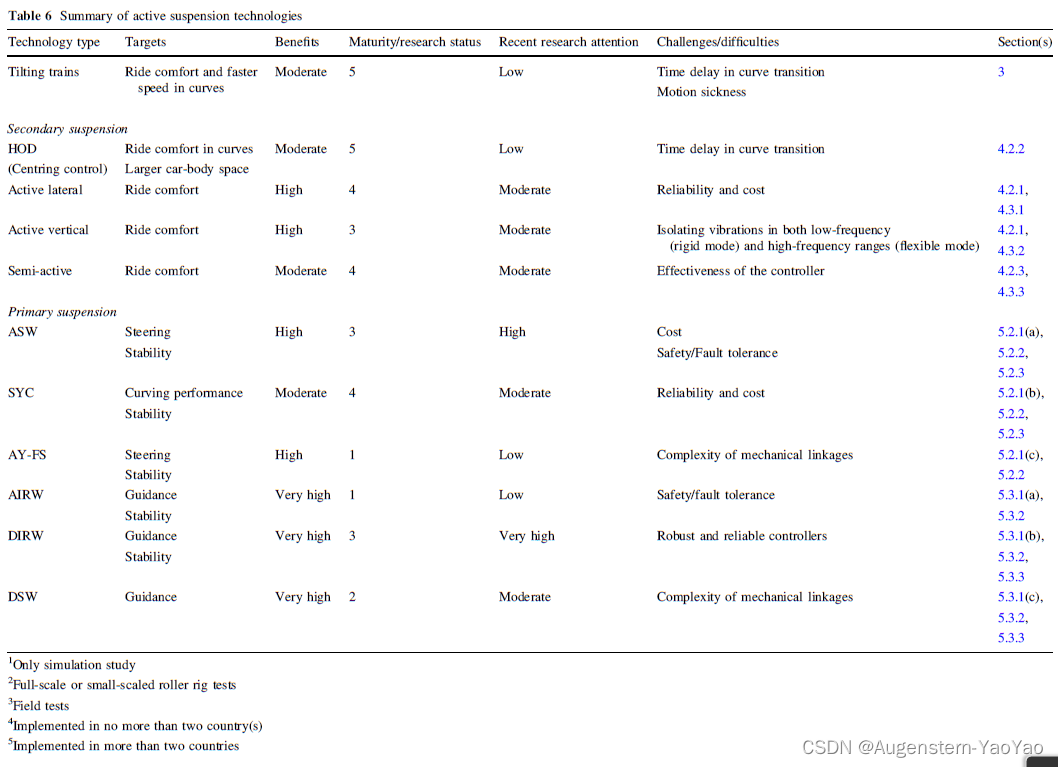
在本文中,主动悬挂的基本概念和分类得到了全面解释。对于主动一系悬挂和二系悬挂,从工作原理、机械配置、控制策略和实施状态等方面进行了详细总结。在过去的十年里,许多经典概念从理论到实施都取得了新的进展,但除了摆式列车外,主动悬挂技术在服务运营中的广泛应用还未实现。表6总结了不同主动悬挂概念的目标、优势、成熟度/研究状态、当前研究关注度、挑战和本文相关章节。优势和研究关注度从“低”到“非常高”进行评级。成熟度/研究状态用星级表示,一个星星意味着到目前为止只进行了仿真结果,而五颗星星意味着技术已发展成熟。
作者认为,广泛应用主动悬挂技术只是时间问题,但未来有一些关键问题将有助于释放其更广泛的使用。
首先,基于行业的成本效益分析对于全面确定潜在影响至关重要。到目前为止,商业案例主要发现在高性能列车上,其中主动系统的额外成本与总成本相比较小。然而,如表6所示,从主动系统的应用中可能获得的好处是有意义的。考虑到由轮轨磨损和轮轨接触疲劳(RCF)引起的列车和基础设施的巨大维护成本,未来最佳的商业案例可能是配备主动一级悬挂的列车,预计它将产生比主动二级悬挂更多的好处。在主动一级悬挂中,ASW可能是近期最有前景的技术之一,因为它在磨耗方面潜在的高效益和相对简单的实施。进一步的显著改进可能通过受控独立旋转轮实现,最近已进行了现场测试。
此外,尤其是对于执行器系统,容错设计和分析非常重要,因为安全运行是行业最关心的方面。因此,开发既安全可靠又具有出色维护性和可用性的解决方案至关重要。这是未来值得更多研究的一个主题,也可以从其他技术领域的例子和最佳实践中获益,特别是航空工业,以确保带有机电悬挂的铁路车辆的安全性和提高可靠性,例如采用备份或冗余结构。
未来可能在于缩小执行器的尺寸,这会减少相对运动的阻力,从而降低振动传递的风险。缩小尺寸的执行器的一个典型应用可能是在二级悬挂中,旨在提高振动乘坐舒适性。这意味着准静态力必须由被动系统处理,如果需要较小的位移,则被动悬挂应该更加刚性。在这种情况下,主动系统将补偿由于刚性被动悬挂带来的增加的力传递。
学术界长期以来一直在寻找提供更好性能的控制算法。最近的趋势是,性能与复杂性相关联,并且使用更少且不太可能失败的传感器。此外,主动一系和二系悬挂作动系统的实验研究也在增加。历史上发展更好的主动二系悬挂技术倾向于导致更多的现场测试可能性。然而,一些主动一系悬挂的现场测试已经进行,显示出有希望的结果。
最近,在Run2Rail项目中所做的工作,对于本文的最新技术调查有重要贡献。特别是,它包括了以下方面:通过机电悬挂使车辆具有新的轻量级架构;评估半主动二系和一系悬挂以改善乘坐舒适性和运行装置性能;设计和优化容错配置;具有机电悬挂的车辆的授权框架(authorization framework);潜在影响评估。上述几个方面将在最近开始的Shift2Rail项目NEXTGEAR和PIVOT-2中得到后续研究。研究将扩展到更高的技术成熟度水平,以展示主动悬挂技术的潜在优势。
(完)



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









