







正多面体有正四面体、正六面体、正八面体、正十二面体和正二十面体五种。其中正六面体二面角很平凡的为直角,正四面体、正八面体和正二十面体的面都是正三角形,有很多解三角形的方法可用于求二面角,而正十二面体的面为正五边形,且不易分解为规律明显的三角形,因此正十二面体二面角的求法就相对比较困难。本文给出一种较为简单的求解正十二面体二面角的方法。
如下图所示,设z轴位于A点处且垂直于纸面向外,正五边形ABCDE为正十二面体(棱长为1)的底面,正五边形AEFGH为正十二面体上以AE为轴展开的一个面,正五边形AIJKB为正十二面体上以AB为轴展开的一个面,线段AM所在直线为角IAH的角平分线,线段AM与z轴确定的平面设为(图中未标出),向量
为
的一个法向量,线IL垂直于y轴,垂足为L。
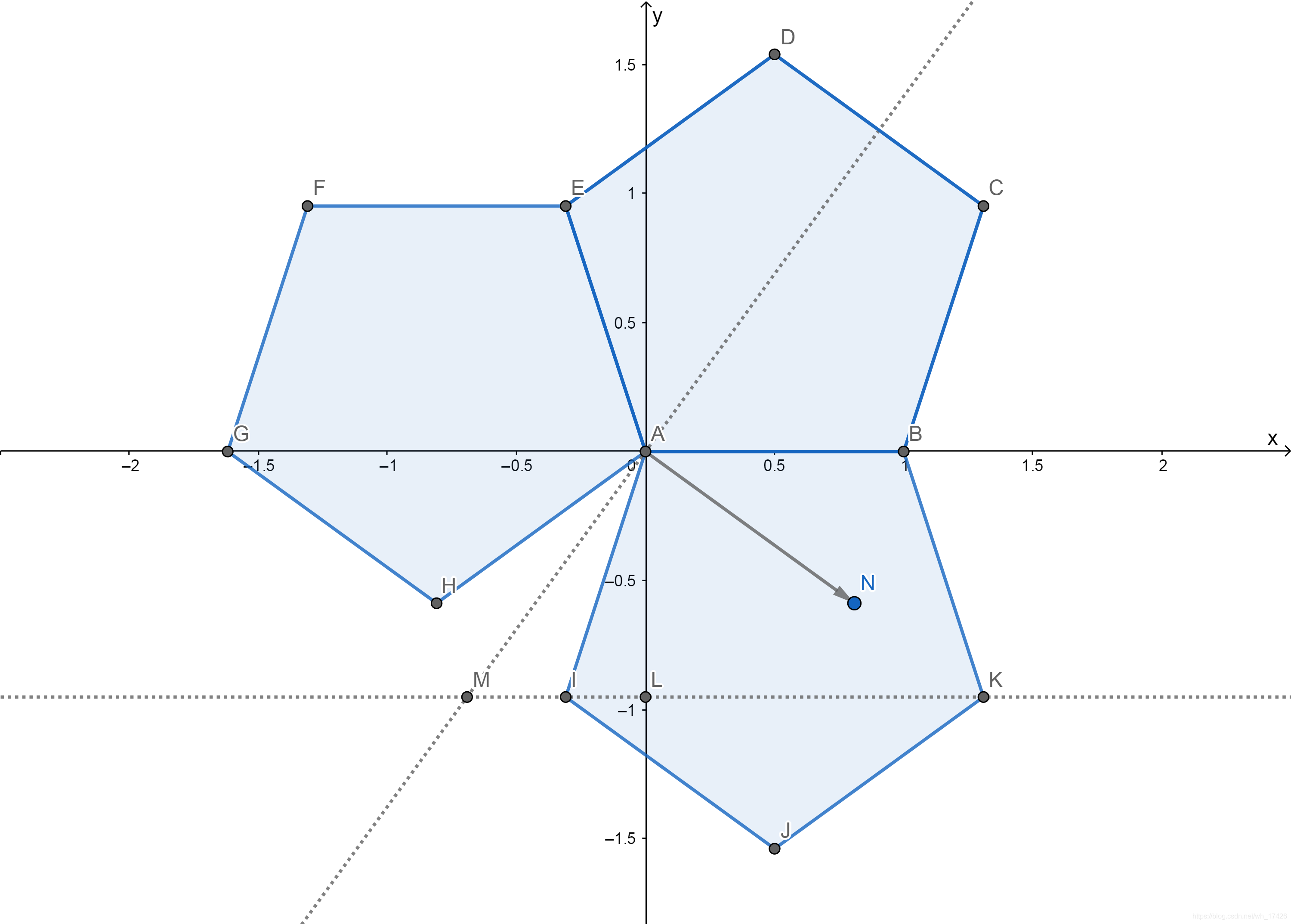
注意到正五边形内角为,则下文中对图中的角直接代入角度值计算,由读者自行推导或转换。现在将正五边形AIJKB以AB为轴向z轴正方向旋转(此时点L跟随面一起动),当旋转角度为
时,由二面角定义,AL与y负半轴夹角也为
,由于AL长度为
则向量的坐标表示为
,又
则
又则
。当AIJKB旋转成正十二面体的一个面时,由于对称性,
应当正好落在面
上,则此时
与
内积为0,即
解得:
而正十二面体二面角在体内,应为,即得二面角约为
。

















 354
354

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









