







目录
细分的图示,将一个区域进行划分:
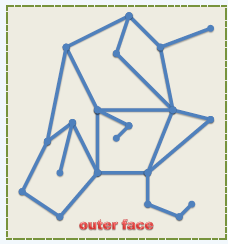
点定位问题
定义:令是
上有
个顶点的细分,给定一个查询点
,确定
位于哪个面片中。
首先给出几个假设:
-
假设每个面片都标记为不同的数字
-
S可以由合适的数据结构(eg.DCEL)表示
-
每个查询点部位与边或者顶点上
每个查询点部位与边或者顶点上
算法效率总结:
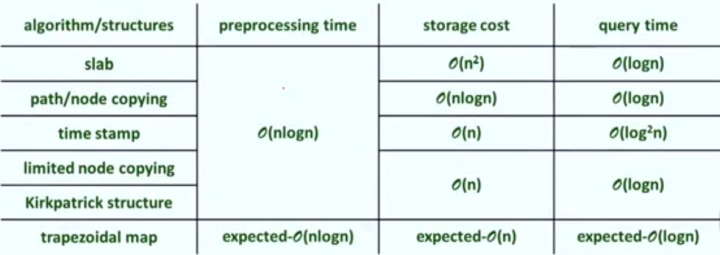
slab算法(基于简而治之的思想)
预处理:将细分沿竖直方向进行分割,每条分割线都经过一个顶点,每条分割线之间形成一个个slab。这些slab在下面的操作中会进行组织。
划分slab
不难发现,每个slab都含有很多梯形(三角形看做是退化的梯形),这些梯形在下面的操作中会进行排序组织。
进行数据组织:形成tree of trees
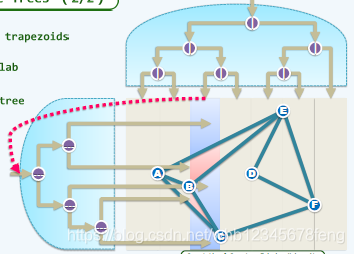
上面那棵树是对slab之间的数据组织,左边那棵树是对每个slab内部梯形的组织。
步骤:先x方向搜索,确定查询点位于哪个slab中,而后y方向搜索,确定查询点位于该slab的哪个梯形中。
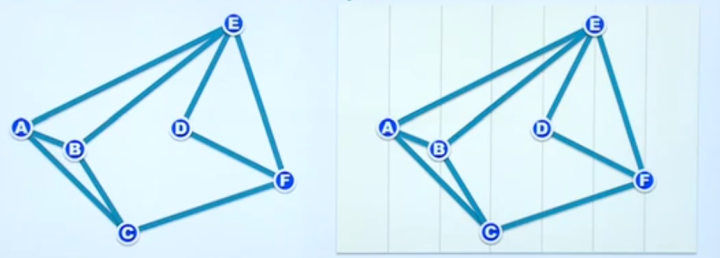
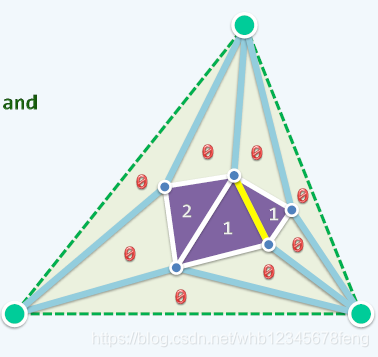
基于Kirkpatrick结构的方法(基于简而治之的思想)
首先给出假设:假设所有面片都是三角形,而且out face也是三角形。如下图所示
构建层次结构:
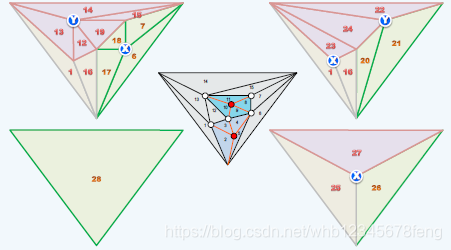
于是产生了一个三角剖分序列,其中
是最初始的三角剖分,
是一个简单的三角形,也就是
的out face。
的每个三角形与
有重叠的部分。
由产生
:在
中找到合适的顶点子集,移除这些顶点以及相应的边,对剩下的洞的部分重新三角剖分。
这里我们要找的顶点子集中的顶点需要是独立的,也就是每两个顶点不相邻,没有边连接这两个顶点。要求独立子集的规模达到原图的固定百分比(比如百分之五,百分之六等)即可。独立子集中的顶点个数越大越好,与
的重叠部分越少越好。约定
的每个三角形与
中三角形重叠的个数不超过某一个常数,也就是控制每个被删除的顶点的度数即可。
独立子集构造算法:
由于平面图中度数不超过8的顶点数至少有个;一个一个检查n个顶点,当顶点的度数不少于8则忽略,否则将该顶点加入到独立子集中去,移除独立子集中该顶点的度数
8的相邻点。
从而构成这样一个层次结构:
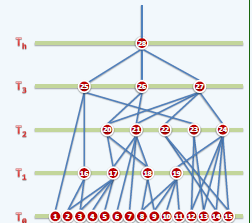
构造过程自底而上,查询过程自顶而下;这样的结构并不是一棵树,而是一个有向无环图(DAG)。
梯形图
考虑subdivision中的一条条不相冲突(除端点外不存在交点)线段
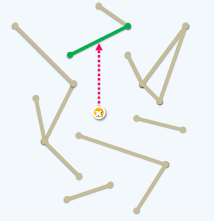
然后找到x的y方向上最上面的那条线段。
构建梯形图TM(S)
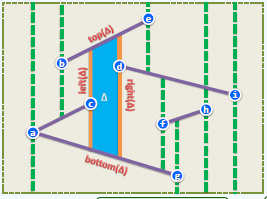
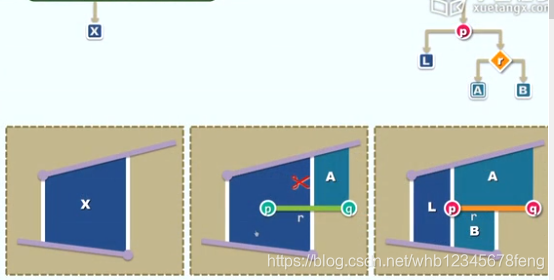
每个梯形都可以由top、bottom、left、right组成,left、right是由顶点所决定的。
Search Structure(SS):DAG(有向无环图)
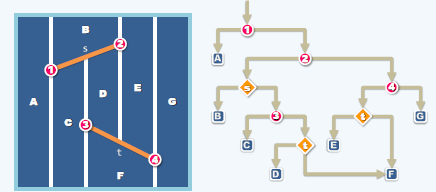
蓝色方块称为terminal Node,对应于每一个梯形,红色圆圈称为X-Node,对应为每一条线段的端点,橙色菱形称为Y-Node,对应于线段(非一一对应,可能一条线段对应多个Y-Node)
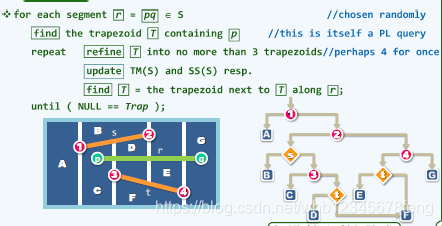
基于梯形图的构造方法:(基于随机递增思想)
首先用一个包围框R把所有的线段包含在其中,生成一个简单的梯形,也就是R(这里实际上是长方形)而后逐一将每条线段加入到梯形图中,使得梯形图进一步细化,而Search Structure得到拓展。
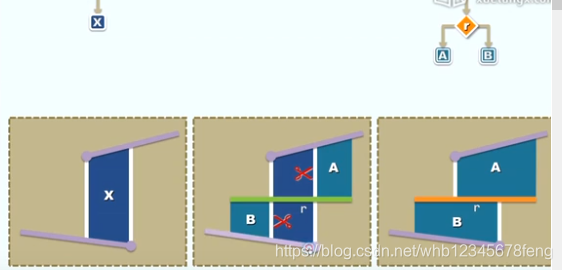
梯形细分可能的情况:
Case1:
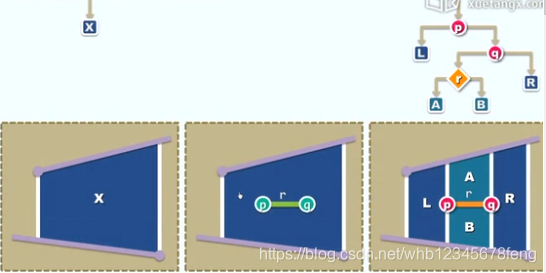
Case2:
Case3:
下面给出一个例子:s、t是原有的线段,r是插入线段
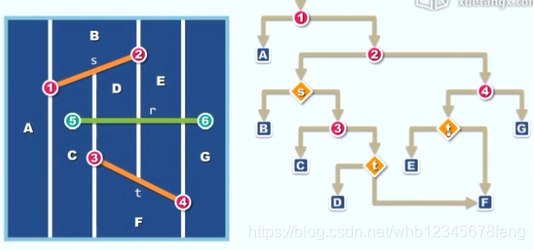
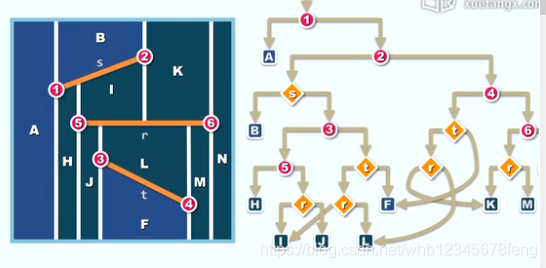
插入线段的顺序是无关的,因此是随机算法,每次得到的SS是不同的,但是它的平均期望是很好的。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









