









 本文围绕张氏标定法展开,介绍其仅需相机观察平面图案在不同方向的情况,可自由移动相机或图案,还对径向镜头畸变建模。阐述了基本方程,包括各坐标系关系、单应性矩阵等,详细说明了求解相机标定的闭式解、最大似然估计及径向镜头畸变估计等内容。
本文围绕张氏标定法展开,介绍其仅需相机观察平面图案在不同方向的情况,可自由移动相机或图案,还对径向镜头畸变建模。阐述了基本方程,包括各坐标系关系、单应性矩阵等,详细说明了求解相机标定的闭式解、最大似然估计及径向镜头畸变估计等内容。
张正友标定法:A Flexible New Technique for Camera Calibration
Abstract
- It only requires the camera to observe a planar pattern shown at a few (at least two) different orientations.
- Either the camera or the planar pattern can be freely moved
- Radial lens distortion is modeled
- The proposed procedure consists of a closed-form solution(闭式解即解析解), followed by a nonlinear refinement based on the maximum likelihood criterion.
MOTIVATIONS
- 在张氏标定法被提出之前,将已有的标定方法大致分为两类:
摄影测量标定:通过观察校准对象来执行相机校准,该校准对象在3D空间中的几何形状已知且具有非常好的精度。这种方法需要昂贵的校准装置和精心设置。
自标定:在静态场景中移动摄像机,拍摄三幅图片,这种方法很简便,但是并不成熟,标定结果不可靠。 - 张氏标定法则使用2D度量信息,位于使用显式3D模型的摄影测量标定和使用运动刚度或等效隐式3D信息的自标定之间。
BASIC EQUATIONS
Notation
根据相机的小孔成像模型,将世界坐标系和像素坐标系写成等式(1), 关于世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的空间及数学关系,请参考这篇文章。
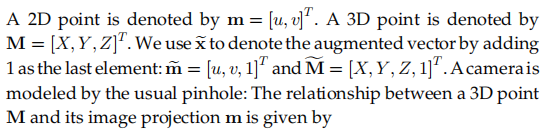

其中:
s是一个任意的尺度因子。
[R t]是相机的外参矩阵,它是世界坐标系到相机坐标系之间的转换参数,世界坐标系通过旋转、平移可以转换到相机坐标系。R是旋转矩阵,t是平移矩阵。
A是相机的内参矩阵,(u0,v0)是图像坐标系的原点坐标在像素坐标系上的值;, alpha和beta是在像素坐标系下u轴和v轴上的尺度因子;gamma是描述两个图像轴偏斜的参数。

Homography between the Model Plane and Its Image
假设标定板所在的平面为世界坐标系的Z=0的平面,这是张氏标定法简化标定流程的重要一步。
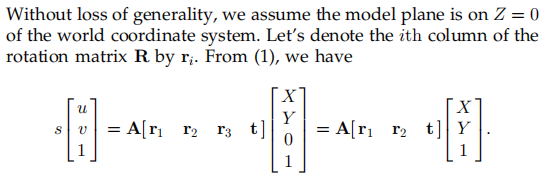
引入单应性矩阵H:
1.单应性矩阵H大小是3 by 3的,并且是一个齐次矩阵,因为其中包含一个齐次坐标,因此存在8个未知数,至少需要8个方程才能求解.
2.根据等式(2),当给定一对单应性对应点的时候,能够得到两个方程.
3.因此至少需要四个对应点,建立8个方程,就可以算出世界坐标系平面到像素坐标系平面的单应性矩阵H.
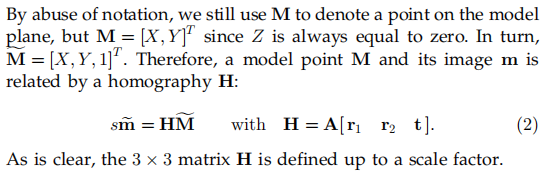
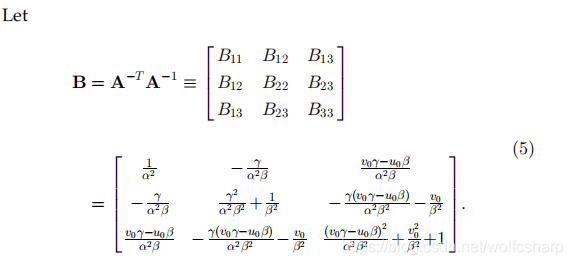
Constraints on the Intrinsic Parameters
给定平板模型的一幅图像,把s移到等式右边,记单应性矩阵H=[h1 h2 h3]
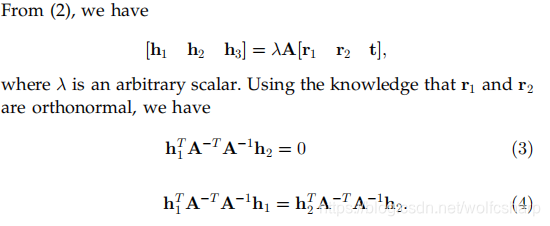
这里有这样一些前提条件及其推导:
(1) lamda = 1/s
(2)A是可逆的,因此
r1=A-1h1/lamda
r2=A-1h2/lamda
(3)旋转矩阵是一个酉矩阵,r1与r2正交,因此
r1Tr2=0
||r1||=||r2||=1,即r1Tr1=r2Tr2
综上,推导出上面的(3)和(4)式。
每个单应性矩阵H可以提供两个方程,而内参矩阵包括5个参数,要求解内参矩阵A,至少需要三个单应性矩阵
为了得到三个不同的单应性矩阵,我们至少调整标定板两次,即至少获得三幅棋盘格平面的图片进行标定。
SOLVING CAMERA CALIBRATION
We start with an analytical solution,followed by a nonlinear optimization technique based on the maximum-likelihood criterion. Finally, we take into account lens distortion, giving both analytical and nonlinear solutions.
Closed-Form Solution
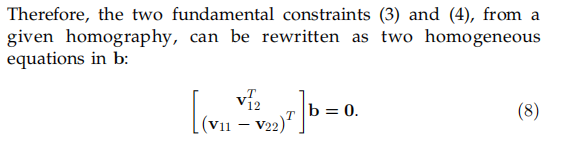
如果观察到模型平面的n个图像,则通过堆叠n个这样的等式(8),我们可以得到:

这里V是一个2n by 6的矩阵。
如果是n >=3,我们通常会得到一个唯一的解b,其定义为比例因子。
如果n=2,我们可以强加无偏约束gamma=0,即[0,1,0,0,0,0]b=0,作为(9)的附加等式,也可以解出b。
如果n = 1,我们只能求解出相机的两个内参,例如,假设u0和v0是已知的(比如图像坐标系原点在像素坐标系的中心),并且假设gamma=0,这样就可以求得alpha和beta。
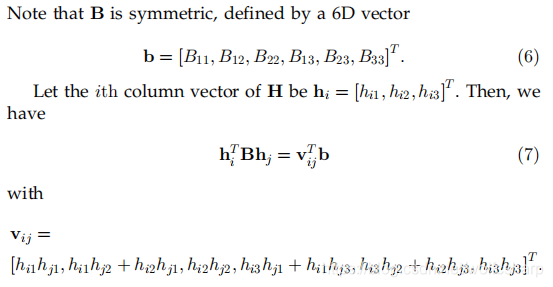
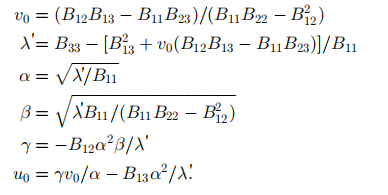
一旦b被求解出来,我们就可以计算所有的相机内参,矩阵B可以被写成:
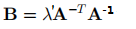
其中,lamda是一个任意大小的尺度因子,因此可以从矩阵B中唯一地提取内参。
一旦知道内参矩阵A,就可以容易地计算外部参数。根据等式(2),我们有
r1=A-1h1/lamda
r2=A-1h2/lamda
r3=r1×r2
t=A-1h3/lamda
其中,lamda=||A-1h1||=||A-1h2||
Maximum-Likelihood Estimation
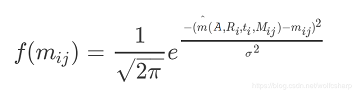
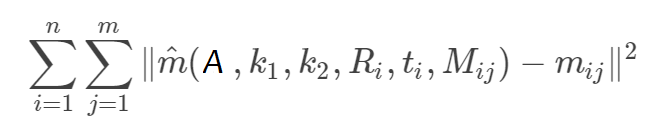
上述的推导结果是基于理想情况下的解,但由于可能存在高斯噪声,所以使用MLE进行优化。设我们采集了n副包含棋盘格的图像进行标定,每个图像里有棋盘格角点m个。令第i副图像上世界坐标系下的角点Mij在上述计算得到的内参A,外参R和t下,在像素坐标系下的投影点为:

其中Ri和ti是第i副图对应的旋转矩阵和平移向量。则角点mij的概率密度函数为:
构造似然函数:

MLE使得目标函数L取得最大值,等价于最小化如下函数:

最小化式(10)是一个非线性最小化问题,可以利用LM算法求解,初始值设置为上面的不精确的解,然后逐步迭代找到最优解。关于LM算法,请参考我的另一篇博客LM(Levenberg–Marquardt)算法原理及其python自定义实现
Radial lens distortion estimation
摄像机通常具有显性的镜头失真,尤其是径向畸变。 张氏标定法只关注了影响最大的径向畸变。去除高阶,镜像畸变的数学模型可以用如下的等式描述:
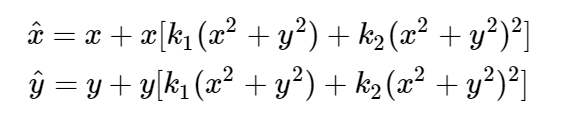
其中(x,y)是理想的无畸变的归一化图像坐标系坐标,(x_hat,y_hat)是畸变后的归一化图像坐标系坐标,k1和k2表示前两阶径向畸变系数。
而径向畸变的中心和相机的主心是在相同的位置,因此有:
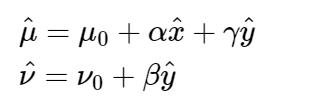
其中,(u,v)是理想的无畸变像素坐标系坐标,(u_hat,v_hat)是畸变后的像素坐标系坐标,(u0,v0)是相机的主点。
假设gamma=0,则有:

写成矩阵形式:

上面的等式是从一幅图像上的一个点取得,仍然设有n幅图像,每幅图像上有m个点,则将得到的所有等式组合起来,可以得到2mn个等式,将其记成矩阵形式:

求解出畸变参数k:

同样使用MLE,用LM算法最小化如下目标函数:
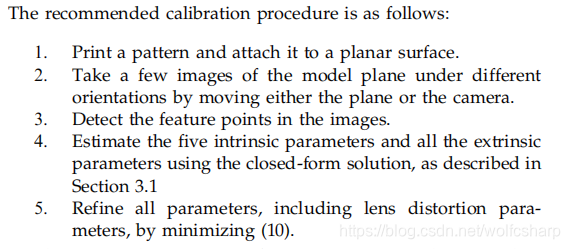
得到畸变参数k1,k2后,可以先将图像进行去畸变处理,然后用去畸变后的图像坐标估计相机的内参数,继而算出外参数。
Summary


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









