







可编程控制器(Programmable Logic Controller)简称 PLC,是从早期的继电器逻辑控制系统发展而来,它不断吸收微计算机技术使之功能不断增强,逐渐适合复杂的控制任务。
PLC 之所以有生命力,在于它更加适合工业现场和市场的要求:高可靠性、强抗各种干扰的能力、编程安装使用简便、低价格长寿命。比之单片机,它的输入输出端更接近现场设备,不需添加太多的中间部件或需要更多的接口,这样节省了用户时间和成本。PLC 的下端(输入端)为继电器、晶体管和晶闸管等控制部件,而上端一般是面向用户的微型计算机。人们在应用它时,可以不必进行计算机方面的专门培训,就能对可编程控制器进行操作及编程。用来完成各种各样的复杂程度不同的工业控制任务。

自 1836 年继电器问世,人们就开始用导线将它同开关器件巧妙地连接,构成用途各异的逻辑控制或顺序控制。至今,在 PLC 的编程语言——梯形图中还可以看到这些布线的影子。直到 60 年代末、70 年代初可编程控制器问世,随着微电子技术、计算机技术和数据通信技术的飞速发展,以及微处理器的出现,PLC 产品朝小型和超小型化方面进行了一次飞跃,最终使早期的 PLC 从最初的逻辑控制、顺序控制,发展成为具有逻辑判断、定时、计数、记忆和算术运算、数据处理、联网通信及 PID 回路调节等功能的现代 PLC。
PLC是应用面很广,发展非常迅速的工业自动化装置,在工厂自动化(FA)和计算机集成制造系统(CIMS)内占重要地位。今天的 PLC 功能,远不仅是替代传统的继电器逻辑。
PLC 系统一般由以下基本功能构成:多种控制功能、数据采集、存储与处理功能、通信联网功能、输入/输出接口调理功能、人机界面功能、编程、调试功能、控制功能逻辑控制:PLC 具有与、或、非、异或和触发器等逻辑运算功能,可以代替继电器进行开关量控制。
- 定时控制:它为用户提供了若干个电子定时器,用户可自行设定:接通延时、关断延时和定时脉冲等方式。
- 计数控制:用脉冲控制可以实现加、减计数模式,可以连接码盘进行位置检测。
- 顺序控制:在前道工序完成之后,就转入下一道工序,使一台 PLC 可作为多部步进控制器使用。
- 数据采集、存储与处理功能数学运算功能:
基本算术:加、减、乘、除。
扩展算术:平方根、三角函数和浮点运算。
比较:大于、小于和等于。
- 数据处理:选择、组织、规格化、移动和先入先出。
- 模拟数据处理:PID、积分和滤波。输入/输出接口调理功能具有 A/D、D/A转换功能,通过 I/O 模块完成对模拟量的控制和调节。位数和精度可以根据用户要求选择。
另 PLC 系统具有温度测量接口,直接连接各种电阻或电偶。通信、联网功能现代 PLC 大多数都采用了通信、网络技术,有 RS232 或 RS485 接口,可进行远程 I/O 控制,多台 PLC 可彼此间联网、通信,外部器件与一台或多台可编程控制器的信号处理单元之间,实现程序和数据交换,如程序转移、数据文档转移、监视和诊断。
在系统构成时,可由一台计算机与多台 PLC 构成“集中管理、分散控制”的分布式控制网络,以便完成较大规模的复杂控制。通常所说的 SCADA 系统,现场端和远程端也可以采用 PLC 作现场机。
人机界面功能提供操作者以监视机器/过程工作必需的信息。允许操作者和PC 系统与其应用程序相互作用,以便作决策和调整。实现人机界面功能的手段:从基层的操作者屏幕文字显示,到单机的 CRT 显示与键盘操作和用通信处理器、专用处理器、个人计算机、工业计算机的分散和集中操作与监视系统。编程、调试等使用复杂程度不同的手持、便携和桌面式编程器、工作站和操作屏,进行编程、调试、监视、试验和记录,并通过打印机打印出程序文件。
PLC 系统大概结构框图如下: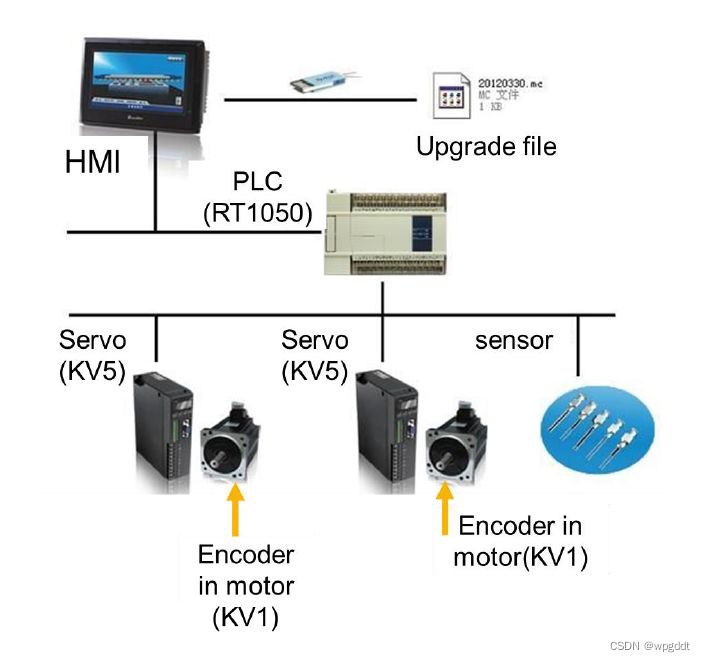
在 PLC 系统主控中我们有高性能的 I.MX RT1060 应用于其中。
芯片框图如下:

功能特点:
- 高性能Arm Cortex-M7
- 3020 CoreMark/1284 DMIPS @ 600 MHz
- 1MB 片上 SRAM - 多达 512KB 可配置为紧耦合存储器(TCM)
- 实时低延迟响应,低至 20 ns
- 通过集成 DC-DC 转换器实现行业最低的动态功耗
- 低功耗运行模式下运行频率为 24MHz
- 面向 GUI 和增强 HMI 的高级多媒体:
2D 图形加速引擎
并行摄像头传感器接口
LCD 显示屏控制器(高达 WXGA 1366x768)
- 3个 I2S,面向高性能多通道音频
- 丰富的外部存储接口选项:
NAND、eMMC、QuadSPI NOR Flash和Parallel NOR Flash
- 无线连接接口:
Wi-Fi、Bluetooth、Bluetooth Low Energy、ZigBee和Thread
- 由 MCUXpresso SDK、IDE 和配置工具提供支持
参考资料:
- 电子发烧友;
- NXP 官网;
- 百度百科;
- 中国产业信息网;
- 《伺服与运动控制》双月刊;















 523
523











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









