






Simulink三相永磁同步电机EKF与AEKF无传感器控制控制方案
电机基于EKF扩展卡尔曼滤波算法和AEKF的永磁同步电机PMSM无传感器矢量控制Simulink仿真模型。
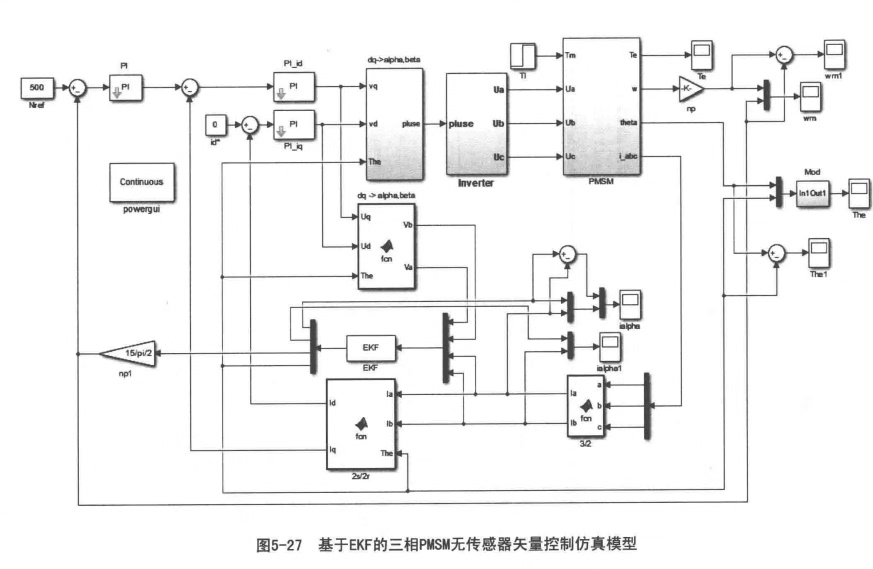
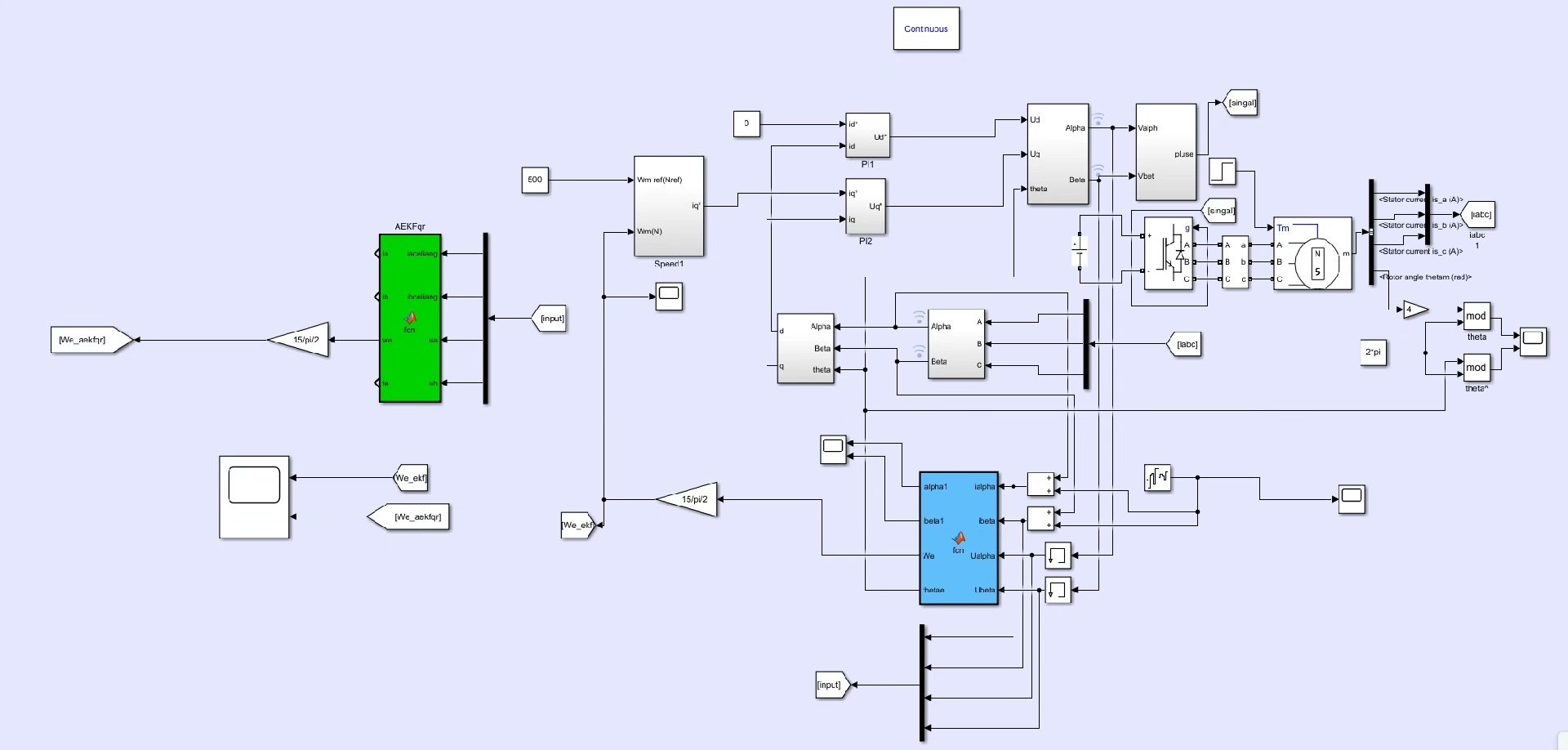
1.依据PMSM的数学模型搭建电机模型
2.基于 PI 调节器进行双闭环dq解耦控制,转速外环,转矩内环
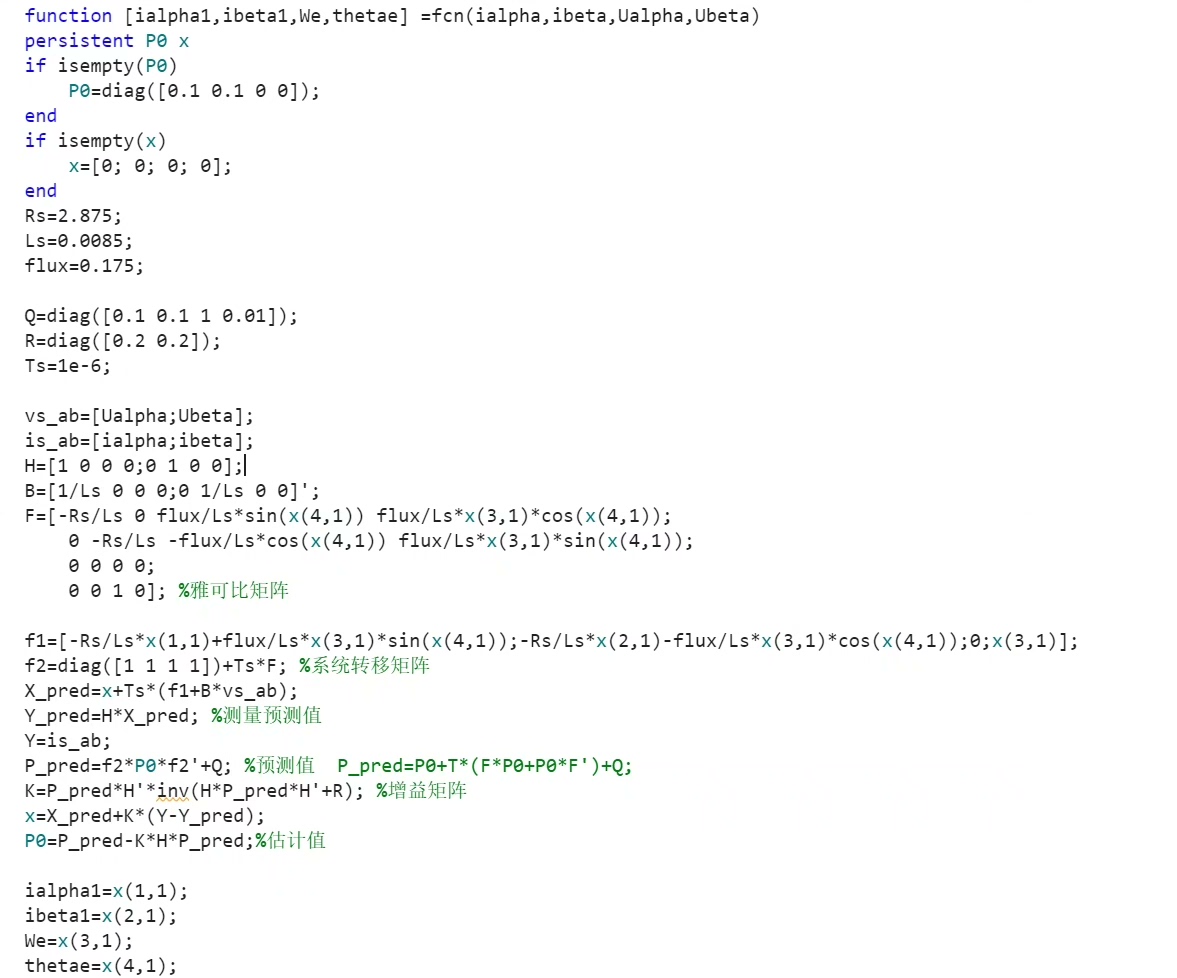
3. EKF和AEKF算法对电机的转子电角度和机械转速进行估算
观测器采用静态变量定义编写,易于学习修改。
文档详实,代码规范
YID:3110777933970952
泰若星刻苦的芥兰
Simulink三相永磁同步电机EKF与AEKF无传感器控制控制方案
摘要:
本文将介绍一种基于EKF扩展卡尔曼滤波算法和AEKF的永磁同步电机PMSM无传感器矢量控制的Simulink仿真模型。首先,根据PMSM的数学模型搭建电机模型。然后,采用PI调节器进行双闭环dq解耦控制,其中转速为外环,转矩为内环。最后,通过EKF和AEKF算法对电机的转子电角度和机械转速进行估算。观测器采用静态变量定义编写,易于学习修改。本文旨在提供详实的文档和规范的代码,为永磁同步电机的无传感器控制提供一种有效的解决方案。
-
引言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)作为一种高效率、高功率密度和高可靠性的电机,广泛应用于电动汽车、工业控制和家电等领域。传统的PMSM控制需要传感器来测量电机的转子位置和速度,然而传感器的成本较高且容易受到环境干扰,因此无传感器控制成为了研究的热点之一。本文将介绍一种基于EKF和AEKF算法的无传感器控制方案,利用Simulink进行仿真模型搭建和验证。 -
PMSM电机模型搭建
本节将根据PMSM的数学模型搭建电机模型。PMSM的数学模型可以用dq坐标系下的电压方程和转矩方程表示。利用Simulink中的电气特性模块,可以方便地构建电机模型。根据电机的参数和控制策略进行参数设置,并将输出电压和转矩作为反馈信号输入到PI调节器中。 -
PI调节器实现双闭环dq解耦控制
为了实现对PMSM的无传感器控制,本文采用了双闭环dq解耦控制策略。其中,转速为外环控制,转矩为内环控制。在Simulink中,可以使用PID控制器模块来实现PI调节器。通过调节PID参数,可以得到较好的控制性能。 -
EKF和AEKF算法对电机转子电角度和机械转速的估算
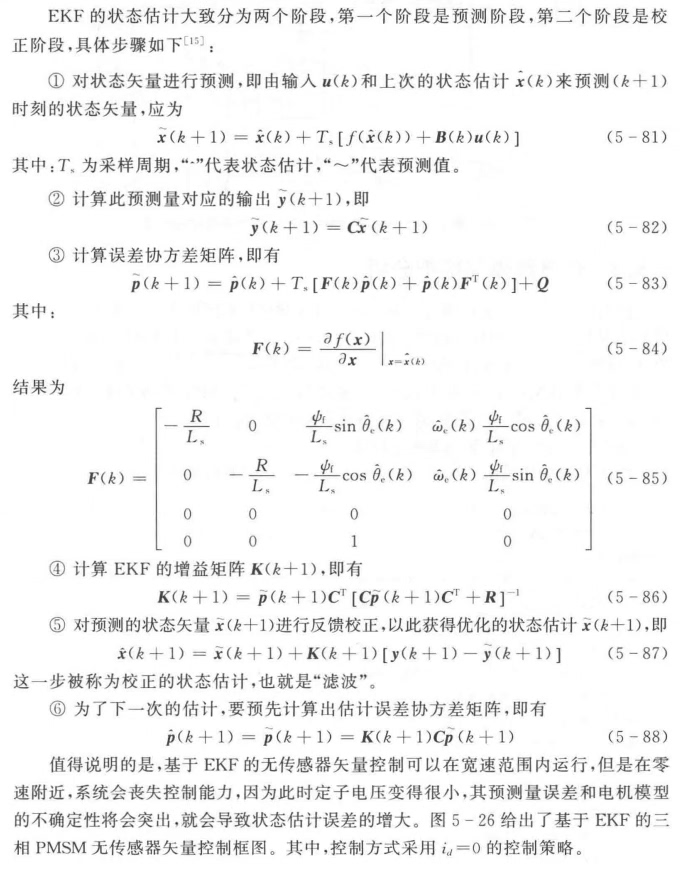
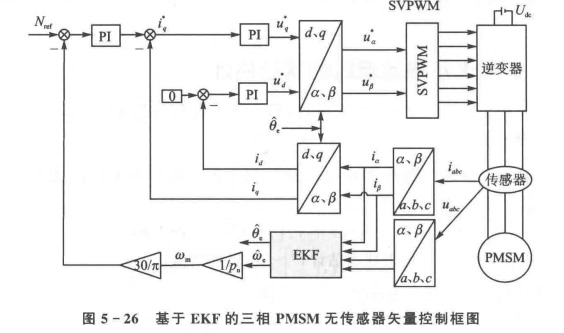
由于无传感器控制无法直接测量电机的转子位置和速度,因此需要通过估算方法来获取这些信息。本文采用EKF和AEKF算法来对电机的转子电角度和机械转速进行估算。EKF是一种基于卡尔曼滤波算法的扩展滤波器,可以通过对系统方程和观测方程进行线性化来估算状态变量的不确定性。AEKF是一种改进的扩展滤波器,通过线性化观测方程来提高估算的精度。在Simulink中,可以利用状态估计器模块和观测器模块来实现EKF和AEKF算法。 -
实验结果与讨论
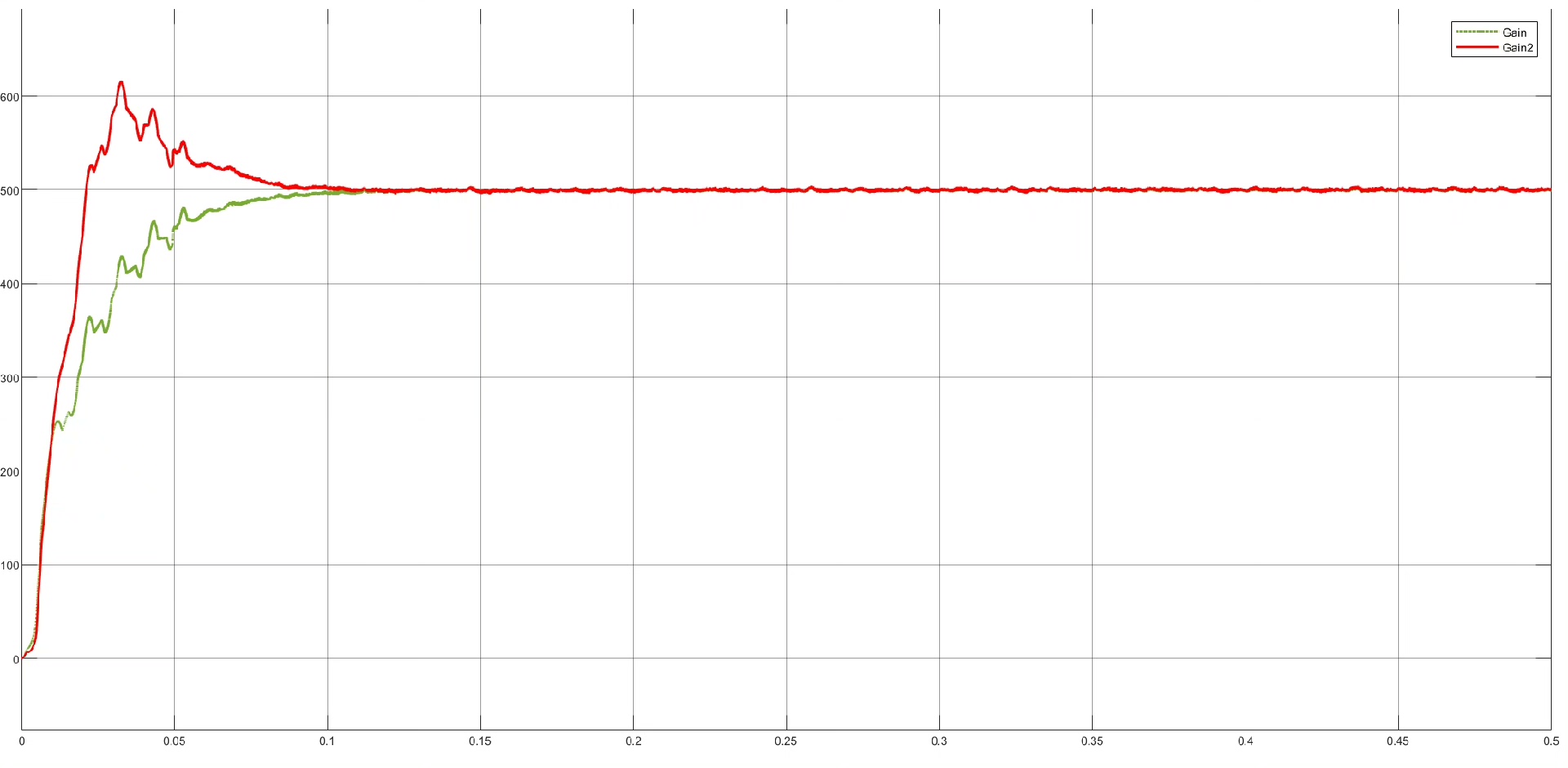
通过Simulink的仿真模型,可以得到PMSM的无传感器控制的实验结果。通过观察仿真波形,可以看出EKF和AEKF算法能够准确地估算出电机的转子电角度和机械转速。通过调节PI调节器的参数,可以得到较好的转速闭环和转矩闭环性能。实验结果验证了本文所提出的控制方案的有效性和准确性。 -
总结
本文介绍了一种基于EKF和AEKF算法的永磁同步电机PMSM无传感器控制方案。通过Simulink的仿真模型,搭建了电机模型,并采用双闭环dq解耦控制策略进行控制。利用EKF和AEKF算法对电机的转子电角度和机械转速进行估算,并通过PI调节器进行控制参数调节。实验结果验证了本文所提出的控制方案的有效性和准确性。本文旨在提供详实的文档和规范的代码,为永磁同步电机的无传感器控制提供一种有效的解决方案。
关键词:Simulink,永磁同步电机,EKF,AEKF,无传感器控制,双闭环dq解耦控制,PI调节器
以上相关代码,程序地址:http://fansik.cn/777933970952.html
















 572
572











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









