









一、NAOqi APIs
NAOqi OS是NAO机器人的核心操作系统,NAOqi API提供了访问机器人的各种传感器设备接口以及应用接口。通过NAOqi,可以在动作、视觉、音频等不同模块之间相互传递信息,也可以通过编程实现各种功能。
二、安装python和NAOqi库
Windows环境下,NAO支持的python版本为32位的python2,可以在python官网中下载。选择Windows ××86 MSI installer,并配置python2的环境变量,将C:\Python27和C:\Python27\Scripts添加至PATH中。然后在软银机器人社区SoftBank Robotics Community中下载NAOqi库,选择Resources中的Software,找到Python 2.7 SDK 2.1.4 Win 32 Setup下载即可。
下载链接:NAOqi python SDK

检查是否安装正确:在python编译器中输入import naoqi,如果没有报错则安装成功。
三、安装Choregraphe
Choregraphe是一个图形化的多平台软件,编写完程序后可以在模拟机器人上测试,也可以运行在真实的机器人上。在软银机器人社区SoftBank Robotics Community中可以下载。选择Resources中的Software,找到Choregraphe 2.1.4 Win 32 Setup下载即可。
下载链接:Choregraphe
四、NAO机器人的有线连接
4.1 连接步骤
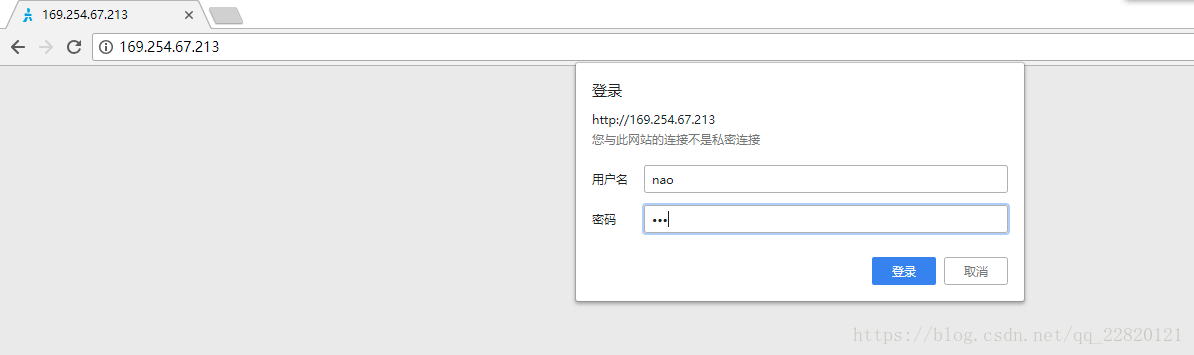
首先将NAO和计算机通过网线连接,将计算机的网络设置为有线连接,然后打开浏览器,按下NAO机器人的胸部按钮,在浏览器中输入NAO报的IP地址。
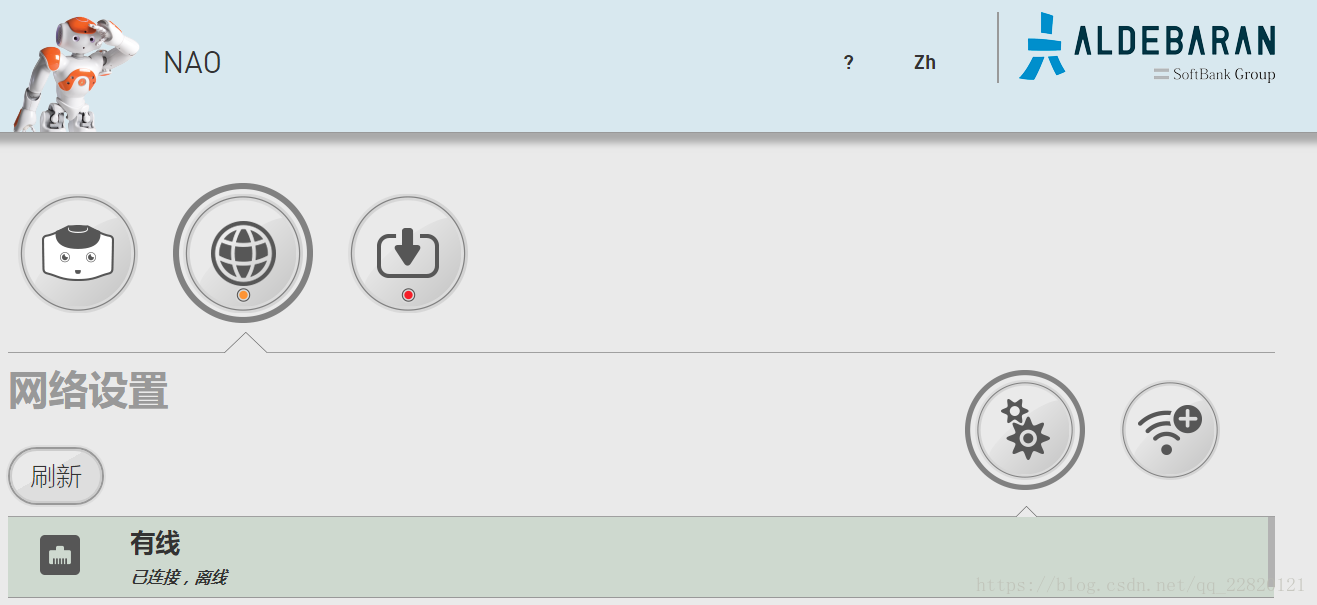
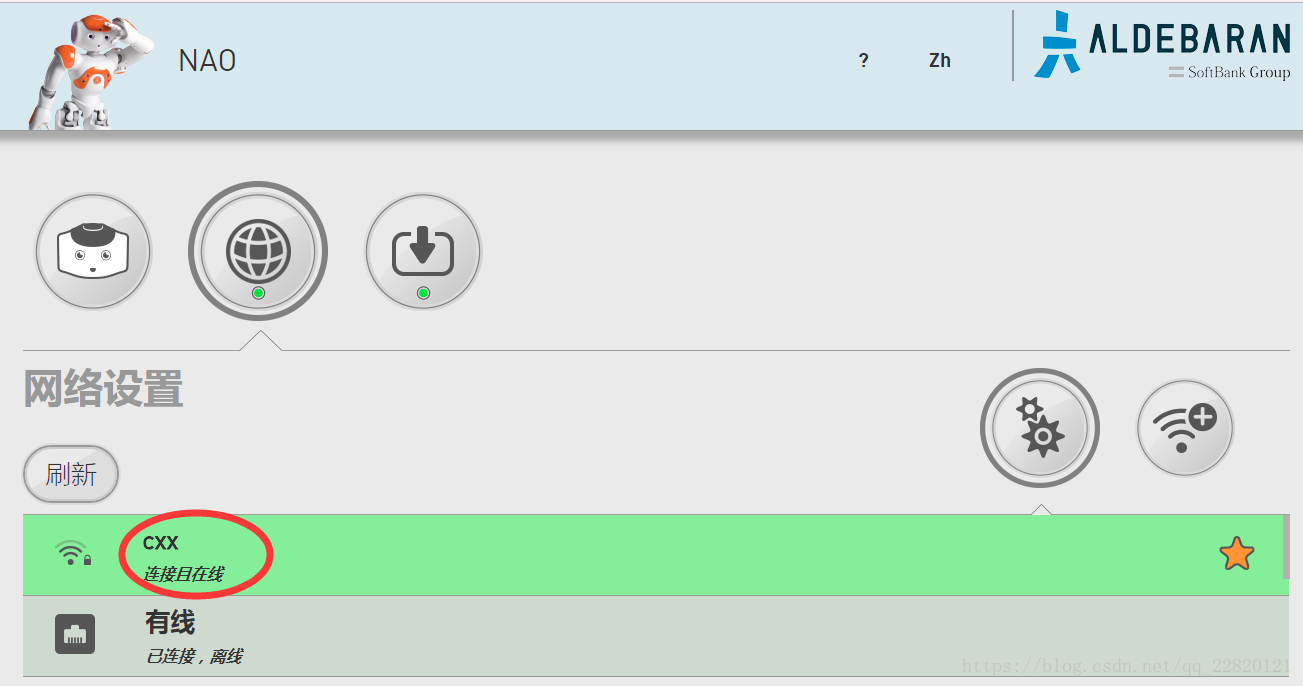
输入用户名nao,密码nao即可登陆至nao机器人网页,在网络设置里面可以看到已经连接至有线。
4.2 测试
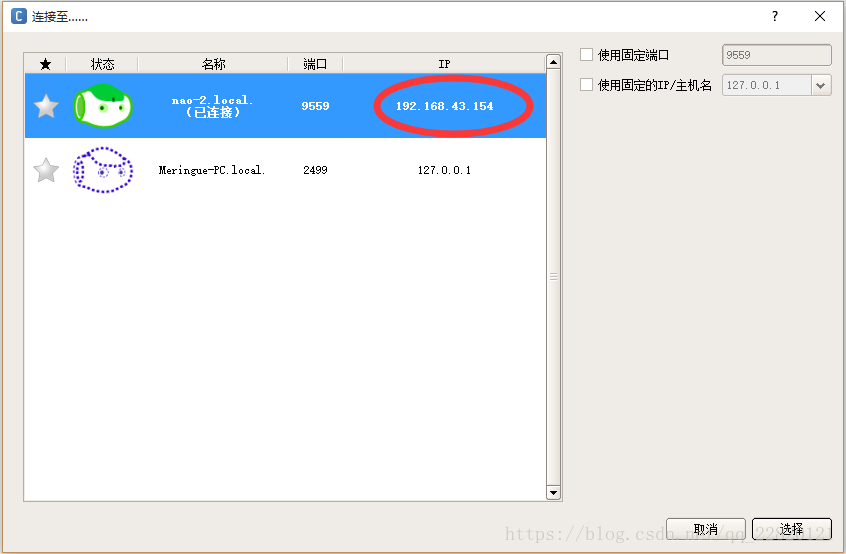
打开Choregraph,选择连接->连接至,在弹出的对话框中选择IP为刚才的NAO机器人,并选择连接。
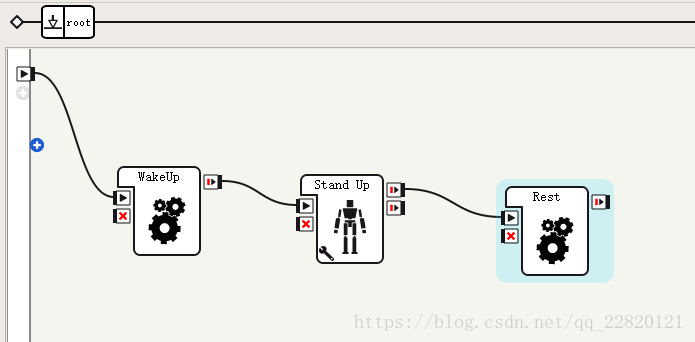
在Choregraph界面的左下角依次选择Motions中的Wake Up,Stand Up和Rest,并用信号线将其连接,即可实现简单的站立、休息的动作。在Choregraph界面的最上面单击绿色三角箭头按钮即可运行程序。
当然也可以通过python编译器在里面输入相应的代码实现此功能。
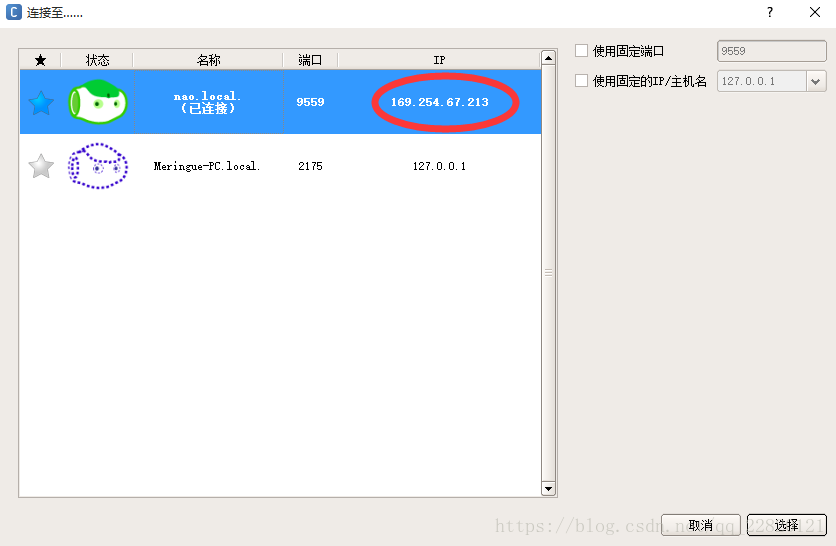
注意,IP和端口号(port)一定要对,IP为按NAO胸口按钮后报出的IP,真实NAO的port默认为9559。
最终效果如图所示:
五、NAO机器人的无线连接及测试
5.1 连接步骤
打开计算机的无线网络连接,然后在打开的NAO网页界面的网络设置中选择相应的无线网络,并拔掉网线,即可实现无线连接。按下NAO胸口按钮,此时会报出无线网的IP地址。
5.2 测试
此时,在Choregraph中的连接选项中,选择无线网的IP地址的NAO机器人,并执行刚才的程序。
在python代码中也需要更改相应的IP地址。
六、虚拟NAO机器人的连接及测试
6.2 连接步骤
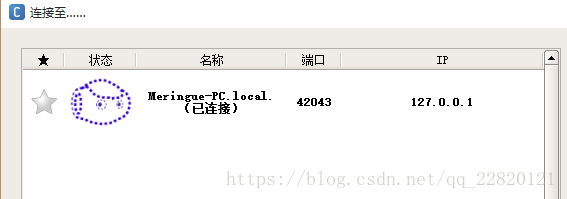
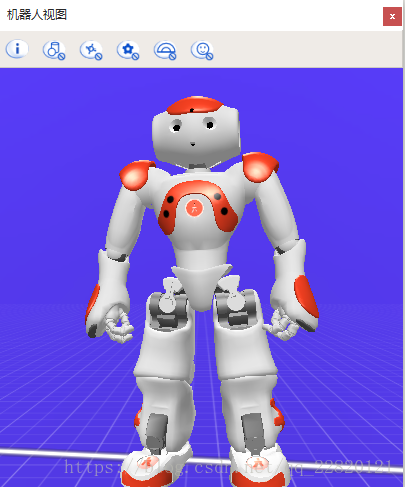
Choregraph软件提供了可连接虚拟机器人的设置,也可以实现一些真实机器人的功能。先断开所有的真实机器人的连接,在连接选项中选择连接虚拟机器人即可连接至一个虚拟机器人。同时可以查看它的IP地址和端口号。(虚拟机器人默认的IP地址都为127.0.0.1)在视图选项中勾选上机器人视图即可查看虚拟机器人。
6.3 测试
同理在python代码中更改相应的IP地址和端口号即可。














 3207
3207











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









