







自己在单目结构光系统、双单目结构光系统及双目相机系统学习的过程中接触到如标题所列的各种矩阵,总感觉理解不到位,现在特总结下,方便日后查阅及修正自己的理解。
自己已经总结了单目相机各坐标系的变换,链接如下:
https://blog.csdn.net/wuxianfeng1987/article/details/115375272![]() https://blog.csdn.net/wuxianfeng1987/article/details/115375272 内参矩阵,标定过程得到:(fx,fy,u0,v0)和畸变系数(三个径向k1,k2,k3,两个切向p1,p2),(fx,fy,u0,v0)构造了内参矩阵,fx,fy单位是像素,隐含了像平面单位mm与像素的换算关系。
https://blog.csdn.net/wuxianfeng1987/article/details/115375272 内参矩阵,标定过程得到:(fx,fy,u0,v0)和畸变系数(三个径向k1,k2,k3,两个切向p1,p2),(fx,fy,u0,v0)构造了内参矩阵,fx,fy单位是像素,隐含了像平面单位mm与像素的换算关系。
旋转矩阵和平移矩阵都比较好理解,就是旋转的参数与平移的参数,这两个合并可组成外参矩阵和本征矩阵。我的理解是在单目中世界坐标系转相机坐标系时叫外参矩阵,而双目中一个相机坐标系到另一个相机坐标系的变换矩阵叫本征矩阵。
接下来就是基础矩阵和单应矩阵,这两个我觉得是相对不好理解的。
单应矩阵


H是两个相机拍摄图像的单应性矩阵, 可见里面Zcr,Zcl是和世界坐标系中的目标位置相关的,当物距很远时这个比值会趋近于1就可以忽略掉,也就是说当物距足够远就可以用单应矩阵来做双目中的像素点匹配,这个可以用来做图像拼接,还有种情况也可以用就是平面位置不变的情况,就是Zcr,Zcl比值不变,H就不变了。
一个比较好的说明:
|
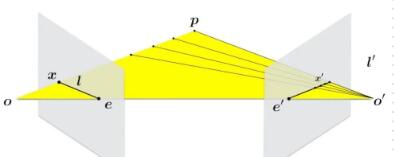
SLAM入门之视觉里程计(5):单应矩阵 - Brook_icv - 博客园中描述:三维点p′并不在平面P上,其在图像1中的像点为x1,使用单应矩阵H计算其在图像2中对应的像点。从上图可以看出,p′在图像2上的像点是x′2,而使用单应矩阵计算得到的像点却是x2。 |

个人觉得这里面有两个不好理解的地方:
1)为什么不变?
实际上描述的是本征矩阵,双目固定后,左相机以其相机坐标系为世界坐标系一样,右相机到左相机的旋转平移矩阵是不变的,参见:
后续补充。
基础矩阵

从表达式上,基础矩阵相较单应矩阵少了双目的物距比值,基础矩阵可以从对极几何角度推导出来,有了基础矩阵可以做极线约束,就是左相机的一个点对应右相机的一条线,反过来也成立。
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









