









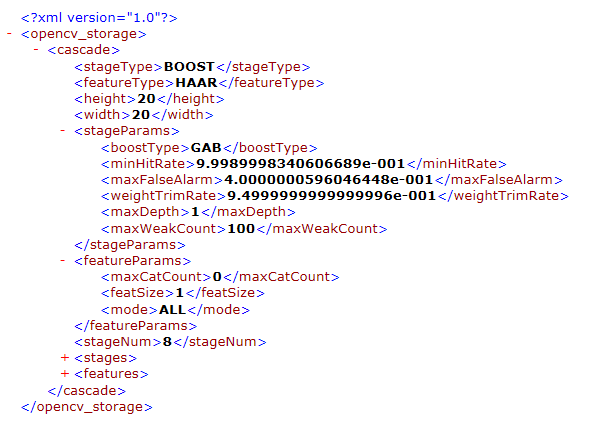
上图显示的参数,大多与opencv_traincascade.exe的输入参数已知。其中maxCatCount和featSize定义如下
maxCatCount:int maxCatCount; // 0 in case of numerical features
featSize:int featSize; // 1 in case of simple features (HAAR, LBP) and N_BINS(9)*N_CELLS(4) in case of Dalal's HOG features
feature结构对于上两值默认的是:
CvFeatureParams::CvFeatureParams() : maxCatCount( 0 ), featSize( 1 ) {...};
其中
LBP:maxCatCount = 256;
HOG:featSize = N_BINS * N_CELLS;
其他情况均用默认值。
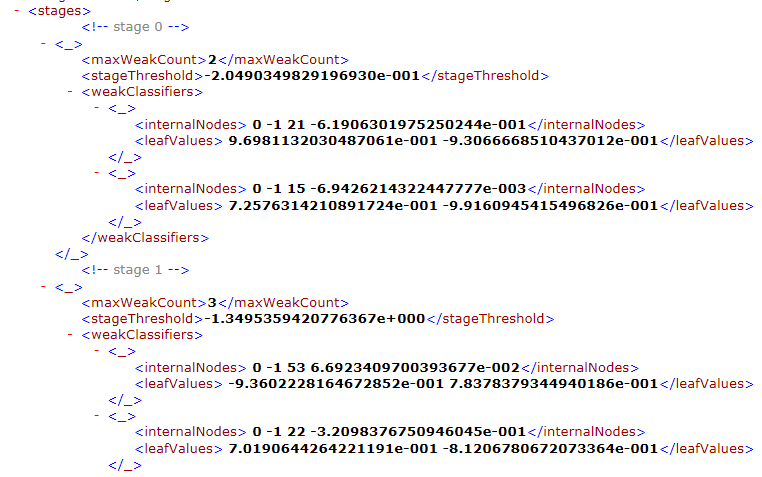
关于maxWeakCount、stageThreshold和weakClassifiers,如下:
void CvCascadeBoost::write( FileStorage &fs, const Mat& featureMap ) const
{
CvCascadeBoostTree* weakTree;
fs << CC_WEAK_COUNT << weak->total; //弱分类器总数
fs << CC_STAGE_THRESHOLD << threshold; //见后续补充
fs << CC_WEAK_CLASSIFIERS << "[";
for( int wi = 0; wi < weak->total; wi++)
{
weakTree = *((CvCascadeBoostTree**) cvGetSeqElem( weak, wi ));
weakTree->write( fs, featureMap );
}
fs << "]";
}void CvCascadeBoostTree::write( FileStorage &fs, const Mat& featureMap )
{
int maxCatCount = ((CvCascadeBoostTrainData*)data)->featureEvaluator->getMaxCatCount();
int subsetN = (maxCatCount + 31)/32;
queue<CvDTreeNode*> internalNodesQueue;
int size = (int)pow( 2.f, (float)ensemble->get_params().max_depth);
Ptr<float> leafVals = new float[size];
int leafValIdx = 0;
int internalNodeIdx = 1;
CvDTreeNode* tempNode;
CV_DbgAssert( root );
internalNodesQueue.push( root );
fs << "{";
fs << CC_INTERNAL_NODES << "[:";
while (!internalNodesQueue.empty())
{
tempNode = internalNodesQueue.front();
CV_Assert( tempNode->left ); //左分支存在
if ( !tempNode->left->left && !tempNode->left->right) // left node is leaf 左分支是叶子节点
{
leafVals[-leafValIdx] = (float)tempNode->left->value;
fs << leafValIdx-- ; //0 -1 -2...
}
else //左分支不是叶子节点
{
internalNodesQueue.push( tempNode->left );
fs << internalNodeIdx++; //1 2 3...
}
CV_Assert( tempNode->right ); //右分支存在
if ( !tempNode->right->left && !tempNode->right->right) // right node is leaf 右分支是叶子节点
{
leafVals[-leafValIdx] = (float)tempNode->right->value;
fs << leafValIdx--; //0,-1,-2...
}
else//右分支不是叶子节点
{
internalNodesQueue.push( tempNode->right );
fs << internalNodeIdx++; //1 2 3...
}
int fidx = tempNode->split->var_idx; //var_idx:分裂中所用到的变量的索引
fidx = featureMap.empty() ? fidx : featureMap.at<int>(0, fidx);
fs << fidx;
if ( !maxCatCount )
fs << tempNode->split->ord.c; //c:用在数值变量的分裂上的阈值。规则如下:如果var_value<c,那么next_node<-left,否则next_node<-right。
else
for( int i = 0; i < subsetN; i++ )
fs << tempNode->split->subset[i];//subset:二值集合,用在在类别向量的分裂上。规则如下:如果var_value在subset里,那么next_node<-left,否则next_node<-right。
internalNodesQueue.pop();
}
fs << "]"; // CC_INTERNAL_NODES
fs << CC_LEAF_VALUES << "[:";
for (int ni = 0; ni < -leafValIdx; ni++)
fs << leafVals[ni]; //即从上面得到的节点value
fs << "]"; // CC_LEAF_VALUES
fs << "}";
}补充threshold:
int i, count = data->sample_count, nz_count = 0;
double sum, threshold;
if( params.weight_trim_rate <= 0. || params.weight_trim_rate >= 1. )
EXIT;
// use weak_eval as temporary buffer for sorted weights
cvCopy( weights, weak_eval );
icvSort_64f( weak_eval->data.db, count, 0 );
// as weight trimming(调整) occurs immediately after updating the weights,
// where they are renormalized, we assume that the weight sum = 1.
sum = 1. - params.weight_trim_rate;
for( i = 0; i < count; i++ )
{
double w = weak_eval->data.db[i];
if( sum <= 0 )
break;
sum -= w;
}
threshold = i < count ? weak_eval->data.db[i] : DBL_MAX;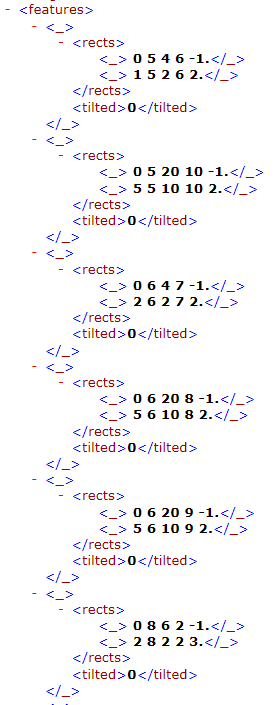
关于features:
void _writeFeatures( const std::vector<Feature> features, cv::FileStorage &fs, const cv::Mat& featureMap )
{
fs << FEATURES << "[";
const cv::Mat_<int>& featureMap_ = (const cv::Mat_<int>&)featureMap;
for ( int fi = 0; fi < featureMap.cols; fi++ ) //个数即featureMap.cols
if ( featureMap_(0, fi) >= 0 )
{
fs << "{";
features[fi].write( fs );
fs << "}";
}
fs << "]";
}void CvHaarEvaluator::Feature::write( FileStorage &fs ) const
{
fs << CC_RECTS << "[";
for( int ri = 0; ri < CV_HAAR_FEATURE_MAX && rect[ri].r.width != 0; ++ri ) //CV_HAAR_FEATURE_MAX=3,上图就表示了我们只用了一个特征
{
fs << "[:" << rect[ri].r.x << rect[ri].r.y <<
rect[ri].r.width << rect[ri].r.height << rect[ri].weight << "]";
}
fs << "]" << CC_TILTED << tilted; //bool型
}类haar特征的tilted取法如下(包括特征计算)
void CvHaarEvaluator::generateFeatures()
{
int mode = ((const CvHaarFeatureParams*)((CvFeatureParams*)featureParams))->mode;
int offset = winSize.width + 1;
for( int x = 0; x < winSize.width; x++ )
{
for( int y = 0; y < winSize.height; y++ )
{
for( int dx = 1; dx <= winSize.width; dx++ )
{
for( int dy = 1; dy <= winSize.height; dy++ )
{
// haar_x2
if ( (x+dx*2 <= winSize.width) && (y+dy <= winSize.height) )
{
features.push_back( Feature( offset, false,x, y, dx*2, dy, -1,//开始tilted都是false
x+dx, y, dx , dy, +2 ) );
}
// haar_y2
if ( (x+dx <= winSize.width) && (y+dy*2 <= winSize.height) )
{
features.push_back( Feature( offset, false,
x, y, dx, dy*2, -1,
x, y+dy, dx, dy, +2 ) );
}
// haar_x3
if ( (x+dx*3 <= winSize.width) && (y+dy <= winSize.height) )
{
features.push_back( Feature( offset, false,
x, y, dx*3, dy, -1,
x+dx, y, dx , dy, +3 ) );
}
// haar_y3
if ( (x+dx <= winSize.width) && (y+dy*3 <= winSize.height) )
{
features.push_back( Feature( offset, false,
x, y, dx, dy*3, -1,
x, y+dy, dx, dy, +3 ) );
}
if( mode != CvHaarFeatureParams::BASIC )
{
// haar_x4
if ( (x+dx*4 <= winSize.width) && (y+dy <= winSize.height) )
{
features.push_back( Feature( offset, false,
x, y, dx*4, dy, -1,
x+dx, y, dx*2, dy, +2 ) );
}
// haar_y4
if ( (x+dx <= winSize.width ) && (y+dy*4 <= winSize.height) )
{
features.push_back( Feature( offset, false,
x, y, dx, dy*4, -1,
x, y+dy, dx, dy*2, +2 ) );
}
}
// x2_y2
if ( (x+dx*2 <= winSize.width) && (y+dy*2 <= winSize.height) )
{
features.push_back( Feature( offset, false,
x, y, dx*2, dy*2, -1,
x, y, dx, dy, +2,
x+dx, y+dy, dx, dy, +2 ) );
}
if (mode != CvHaarFeatureParams::BASIC)
{
if ( (x+dx*3 <= winSize.width) && (y+dy*3 <= winSize.height) )
{
features.push_back( Feature( offset, false,
x , y , dx*3, dy*3, -1,
x+dx, y+dy, dx , dy , +9) );
}
}
if (mode == CvHaarFeatureParams::ALL)
{
// tilted haar_x2
if ( (x+2*dx <= winSize.width) && (y+2*dx+dy <= winSize.height) && (x-dy>= 0) )
{
features.push_back( Feature( offset, true, //这里开始tilted是true
x, y, dx*2, dy, -1,
x, y, dx, dy, +2 ) );
}
// tilted haar_y2
if ( (x+dx <= winSize.width) && (y+dx+2*dy <= winSize.height) && (x-2*dy>= 0) )
{
features.push_back( Feature( offset, true,
x, y, dx, 2*dy, -1,
x, y, dx, dy, +2 ) );
}
// tilted haar_x3
if ( (x+3*dx <= winSize.width) && (y+3*dx+dy <= winSize.height) && (x-dy>= 0) )
{
features.push_back( Feature( offset, true,
x, y, dx*3, dy, -1,
x+dx, y+dx, dx, dy, +3 ) );
}
// tilted haar_y3
if ( (x+dx <= winSize.width) && (y+dx+3*dy <= winSize.height) && (x-3*dy>= 0) )
{
features.push_back( Feature( offset, true,
x, y, dx, 3*dy, -1,
x-dy, y+dy, dx, dy, +3 ) );
}
// tilted haar_x4
if ( (x+4*dx <= winSize.width) && (y+4*dx+dy <= winSize.height) && (x-dy>= 0) )
{
features.push_back( Feature( offset, true,
x, y, dx*4, dy, -1,
x+dx, y+dx, dx*2, dy, +2 ) );
}
// tilted haar_y4
if ( (x+dx <= winSize.width) && (y+dx+4*dy <= winSize.height) && (x-4*dy>= 0) )
{
features.push_back( Feature( offset, true,
x, y, dx, 4*dy, -1,
x-dy, y+dy, dx, 2*dy, +2 ) );
}
}
}
}
}
}
numFeatures = (int)features.size();
}CvHaarEvaluator::Feature::Feature( int offset, bool _tilted,
int x0, int y0, int w0, int h0, float wt0,
int x1, int y1, int w1, int h1, float wt1,
int x2, int y2, int w2, int h2, float wt2 )
{
tilted = _tilted;
rect[0].r.x = x0;
rect[0].r.y = y0;
rect[0].r.width = w0;
rect[0].r.height = h0;
rect[0].weight = wt0;
rect[1].r.x = x1;
rect[1].r.y = y1;
rect[1].r.width = w1;
rect[1].r.height = h1;
rect[1].weight = wt1;
rect[2].r.x = x2;
rect[2].r.y = y2;
rect[2].r.width = w2;
rect[2].r.height = h2;
rect[2].weight = wt2;
if( !tilted )
{
for( int j = 0; j < CV_HAAR_FEATURE_MAX; j++ )
{
if( rect[j].weight == 0.0F )
break;
CV_SUM_OFFSETS( fastRect[j].p0, fastRect[j].p1, fastRect[j].p2, fastRect[j].p3, rect[j].r, offset )
}
}
else
{
for( int j = 0; j < CV_HAAR_FEATURE_MAX; j++ )
{
if( rect[j].weight == 0.0F )
break;
CV_TILTED_OFFSETS( fastRect[j].p0, fastRect[j].p1, fastRect[j].p2, fastRect[j].p3, rect[j].r, offset )
}
}
}另外,是不是觉得参数输入与输出不配,其实如下:(人家是有默认输入的)
Feature( int offset, bool _tilted,
int x0, int y0, int w0, int h0, float wt0,
int x1, int y1, int w1, int h1, float wt1,
int x2 = 0, int y2 = 0, int w2 = 0, int h2 = 0, float wt2 = 0.0F );#define CV_SUM_OFFSETS( p0, p1, p2, p3, rect, step ) \
/* (x, y) */ \
(p0) = (rect).x + (step) * (rect).y; \
/* (x + w, y) */ \
(p1) = (rect).x + (rect).width + (step) * (rect).y; \
/* (x, y + h) */ \
(p2) = (rect).x + (step) * ((rect).y + (rect).height); \
/* (x + w, y + h) */ \
(p3) = (rect).x + (rect).width + (step) * ((rect).y + (rect).height);
#define CV_TILTED_OFFSETS( p0, p1, p2, p3, rect, step ) \
/* (x, y) */ \
(p0) = (rect).x + (step) * (rect).y; \
/* (x - h, y + h) */ \
(p1) = (rect).x - (rect).height + (step) * ((rect).y + (rect).height);\
/* (x + w, y + w) */ \
(p2) = (rect).x + (rect).width + (step) * ((rect).y + (rect).width); \
/* (x + w - h, y + w + h) */ \
(p3) = (rect).x + (rect).width - (rect).height \
+ (step) * ((rect).y + (rect).width + (rect).height);Feature类组成如下:
class Feature
{
public:
Feature();
Feature( int offset, bool _tilted,
int x0, int y0, int w0, int h0, float wt0,
int x1, int y1, int w1, int h1, float wt1,
int x2 = 0, int y2 = 0, int w2 = 0, int h2 = 0, float wt2 = 0.0F );
float calc( const cv::Mat &sum, const cv::Mat &tilted, size_t y) const;
void write( cv::FileStorage &fs ) const;
bool tilted;
struct
{
cv::Rect r;
float weight;
} rect[CV_HAAR_FEATURE_MAX];
struct
{
int p0, p1, p2, p3;
} fastRect[CV_HAAR_FEATURE_MAX];
};inline float CvHaarEvaluator::operator()(int featureIdx, int sampleIdx) const
{
float nf = normfactor.at<float>(0, sampleIdx);
return !nf ? 0.0f : (features[featureIdx].calc( sum, tilted, sampleIdx)/nf);
}
inline float CvHaarEvaluator::Feature::calc( const cv::Mat &_sum, const cv::Mat &_tilted, size_t y) const
{
const int* img = tilted ? _tilted.ptr<int>((int)y) : _sum.ptr<int>((int)y);
float ret = rect[0].weight * (img[fastRect[0].p0] - img[fastRect[0].p1] - img[fastRect[0].p2] + img[fastRect[0].p3] ) +
rect[1].weight * (img[fastRect[1].p0] - img[fastRect[1].p1] - img[fastRect[1].p2] + img[fastRect[1].p3] );
if( rect[2].weight != 0.0f )
ret += rect[2].weight * (img[fastRect[2].p0] - img[fastRect[2].p1] - img[fastRect[2].p2] + img[fastRect[2].p3] );
return ret;
}补充
HOG计算:
void CvHOGEvaluator::generateFeatures()
{
int offset = winSize.width + 1;
Size blockStep;
int x, y, t, w, h;
for (t = 8; t <= winSize.width/2; t+=8) //t = size of a cell. blocksize = 4*cellSize
{
blockStep = Size(4,4);
w = 2*t; //width of a block
h = 2*t; //height of a block
for (x = 0; x <= winSize.width - w; x += blockStep.width)
{
for (y = 0; y <= winSize.height - h; y += blockStep.height)
{
features.push_back(Feature(offset, x, y, t, t));
}
}
w = 2*t;
h = 4*t;
for (x = 0; x <= winSize.width - w; x += blockStep.width)
{
for (y = 0; y <= winSize.height - h; y += blockStep.height)
{
features.push_back(Feature(offset, x, y, t, 2*t));
}
}
w = 4*t;
h = 2*t;
for (x = 0; x <= winSize.width - w; x += blockStep.width)
{
for (y = 0; y <= winSize.height - h; y += blockStep.height)
{
features.push_back(Feature(offset, x, y, 2*t, t));
}
}
}
numFeatures = (int)features.size();
}CvHOGEvaluator::Feature::Feature( int offset, int x, int y, int cellW, int cellH )
{
rect[0] = Rect(x, y, cellW, cellH); //cell0
rect[1] = Rect(x+cellW, y, cellW, cellH); //cell1
rect[2] = Rect(x, y+cellH, cellW, cellH); //cell2
rect[3] = Rect(x+cellW, y+cellH, cellW, cellH); //cell3
for (int i = 0; i < N_CELLS; i++)
{
CV_SUM_OFFSETS(fastRect[i].p0, fastRect[i].p1, fastRect[i].p2, fastRect[i].p3, rect[i], offset);
}
}void CvLBPEvaluator::generateFeatures()
{
int offset = winSize.width + 1;
for( int x = 0; x < winSize.width; x++ )
for( int y = 0; y < winSize.height; y++ )
for( int w = 1; w <= winSize.width / 3; w++ )
for( int h = 1; h <= winSize.height / 3; h++ )
if ( (x+3*w <= winSize.width) && (y+3*h <= winSize.height) )
features.push_back( Feature(offset, x, y, w, h ) );
numFeatures = (int)features.size();
}CvLBPEvaluator::Feature::Feature( int offset, int x, int y, int _blockWidth, int _blockHeight )
{
Rect tr = rect = cvRect(x, y, _blockWidth, _blockHeight);
CV_SUM_OFFSETS( p[0], p[1], p[4], p[5], tr, offset )
tr.x += 2*rect.width;
CV_SUM_OFFSETS( p[2], p[3], p[6], p[7], tr, offset )
tr.y +=2*rect.height;
CV_SUM_OFFSETS( p[10], p[11], p[14], p[15], tr, offset )
tr.x -= 2*rect.width;
CV_SUM_OFFSETS( p[8], p[9], p[12], p[13], tr, offset )
}














 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









