







上一篇详细介绍了Grbl的梯形速度算法,本篇将讲解一个笔者在学习控制Grbl时比较好用的上位机——UGS。
上位机与下位机
“上位机”是一个常见于工业自动化、嵌入式系统和计算机控制领域的术语;有上位机那一定也有下位机。简单来说:上位机就是控制和管理“下位机”的计算机或系统。
上下位机的基本关系:
-上位机:一般是指功能更强、负责控制和管理的设备,比如PC、工控机、服务器等。它可以运行各种软件,监控和操作下位机。
-下位机:通常是被上位机控制的设备,比如单片机、PLC(可编程逻辑控制器)、嵌入式控制板等,负责具体的硬件操作或数据采集。
对于Grbl来说,它们扮演的角色如下:
| 元素 | 角色 | 功能 |
|---|---|---|
| GRBL | 下位机固件 | 执行 G-code,控制运动 |
| Arduino Uno | 硬件载体(下位机) | 运行 GRBL,连接电机等硬件 |
| UGS | 上位机软件 | 向 GRBL 发送 G-code、可视化控制 |
简单说:UGS 是“遥控器”,GRBL 和Arduino Uno是“执行者”;而Grbl是执行者的“灵魂”,Arduino Uno是执行者的“身体”。
UGS
为什么是UGS?
对于初学者来说,UGS这类的上位机是控制电机的最佳选择,不仅会提供友好的界面,也不需要考虑太多程序方面的东西,只要明白gcode的基本语法便可以轻松控制电机,获得小小的成就感后再学习更多的操控方式会事半功倍。
笔者在学习时使用的电机是自制写字机,于是选择了UGS这个上位机。
以下是自制写字机的教程链接,取自B站up主大鱼DIY:
https://www.bilibili.com/video/BV1Uh411Q7Zp?vd_source=1bbb7e5acd499a4085ccd8508b7bc379
UGS教程
以下是UGS平台下载链接:
https://universalgcodesender.com/download/
加载界面:
使用界面:
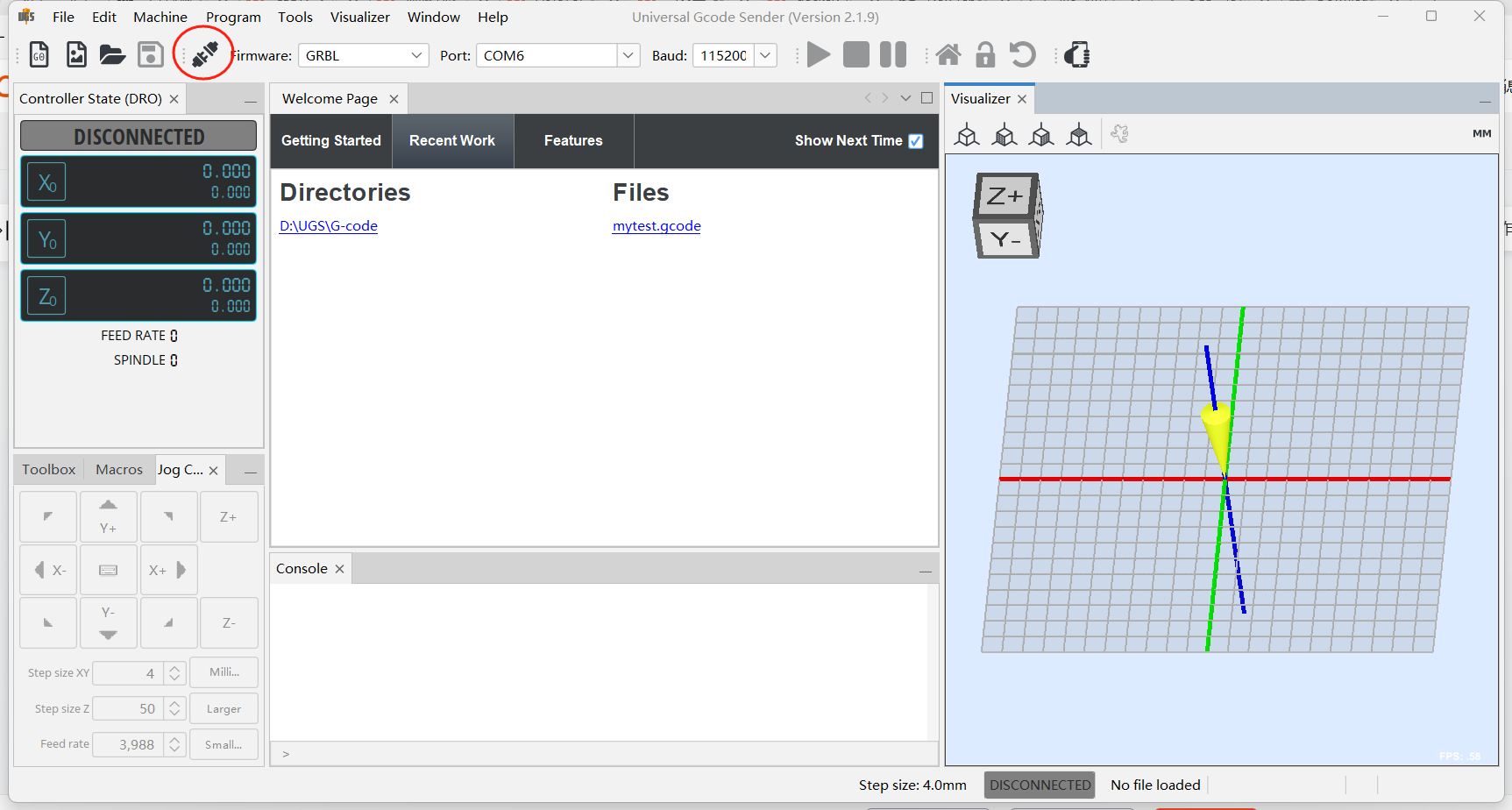
将开发板两端分别与电脑USB接口以及电机连接后,就可以点击上图中红色圆圈圈住的按钮,即可进行连接,连接成功后会如下图:
(需要注意的是:连接的开发板需要确保已经烧录Grbl源码才可控制电机,烧录方法本篇暂不介绍。会在下篇学习烧录需要用到的Arduino IDE时一并介绍)
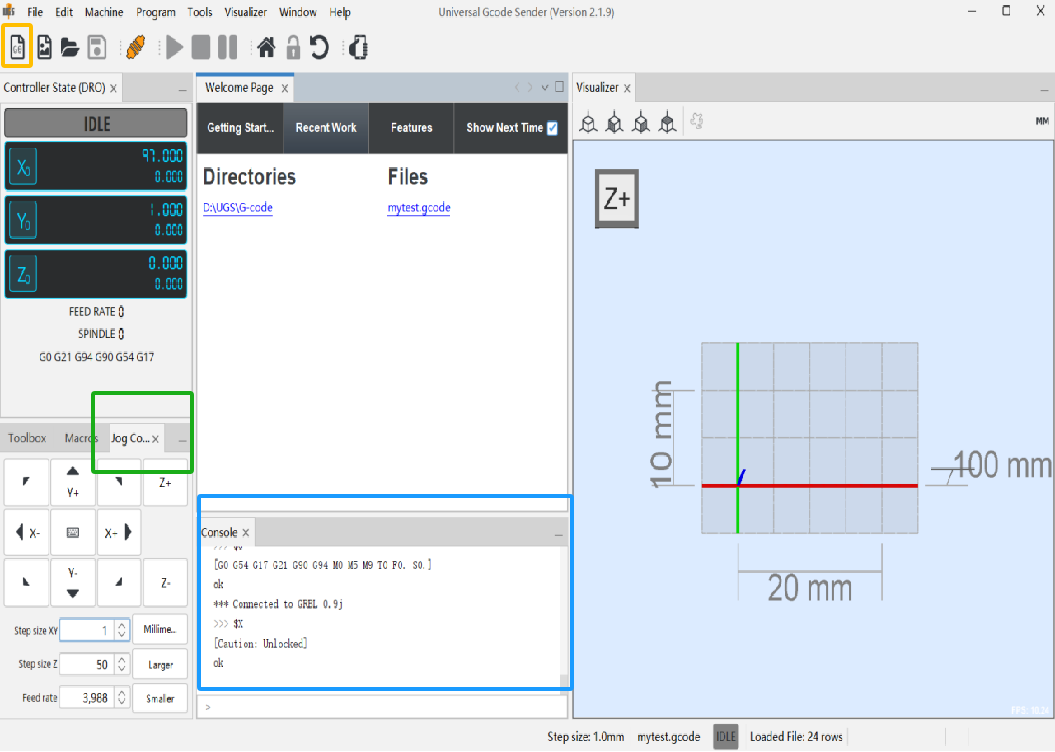
成功建立通信后便可以通过以下三种方式控制电机(写字机)移动:
1.蓝框中的串口监视器,可以通过发送gcode逐步控制电机移动,适用于逐步调试。
2.绿框中的步进按钮,可以通过设置步长以及选择移动方向控制移动,适用于微调。
3.黄框中导入或编写gcode脚本,可以执行完整的一系列指令控制移动,适用于完成复杂连续的操作。
需要注意的是:Grbl首先要接收到 $X 解锁指令,否则不会执行任何代码。
笔者在学会使用上位机后,感觉终于度过了前期学习基础知识的茫茫黑夜,可以获得一些看得到的成果了。就像你第一次开拖拉机下地——刚开始迷茫、按钮一堆,越学越爽,最后开着它种田、翻地、播种全包了!(虽然我并不会开挖掘机doge)
下一篇将介绍其余一些利用串口通信控制Grbl的方法
以上便是本篇的全部内容啦!
欢迎大家一起交流学习!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









