






视频展示效果
红外解码视频演示
一、环境介绍
硬件设备:STM32F103C8T6、红外模块
软件环境:STM32CubeIDE
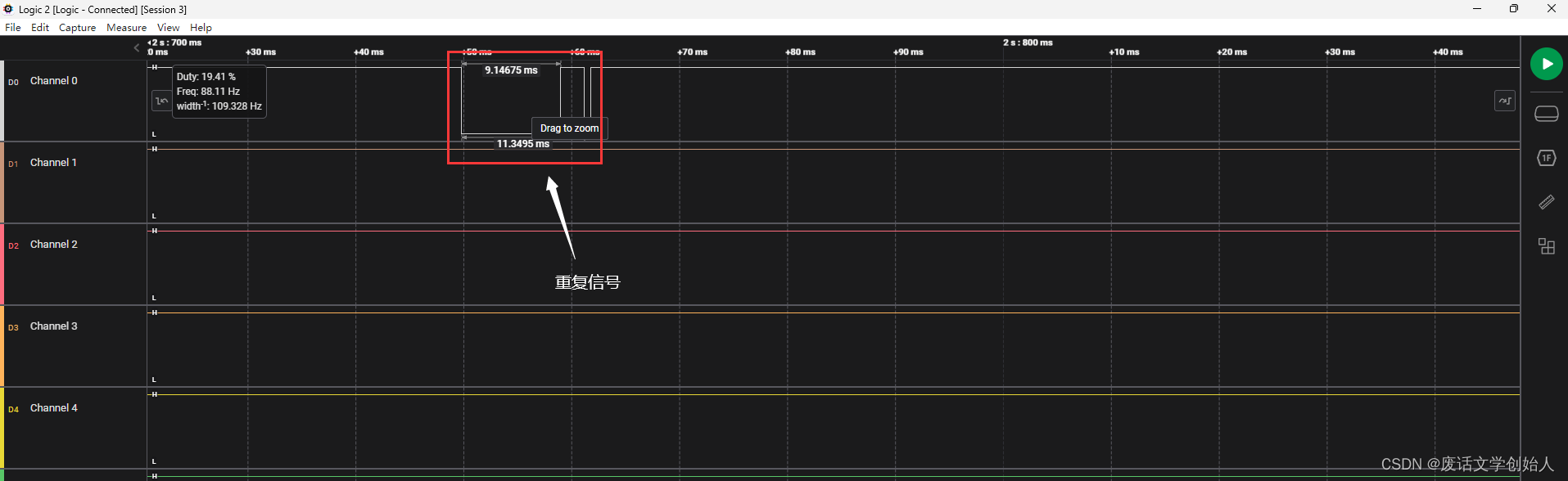
二、红外接收波形监测分析(重点)
我这里使用逻辑分析仪分析接收到的红外波形,截取了几种关键波形作分析
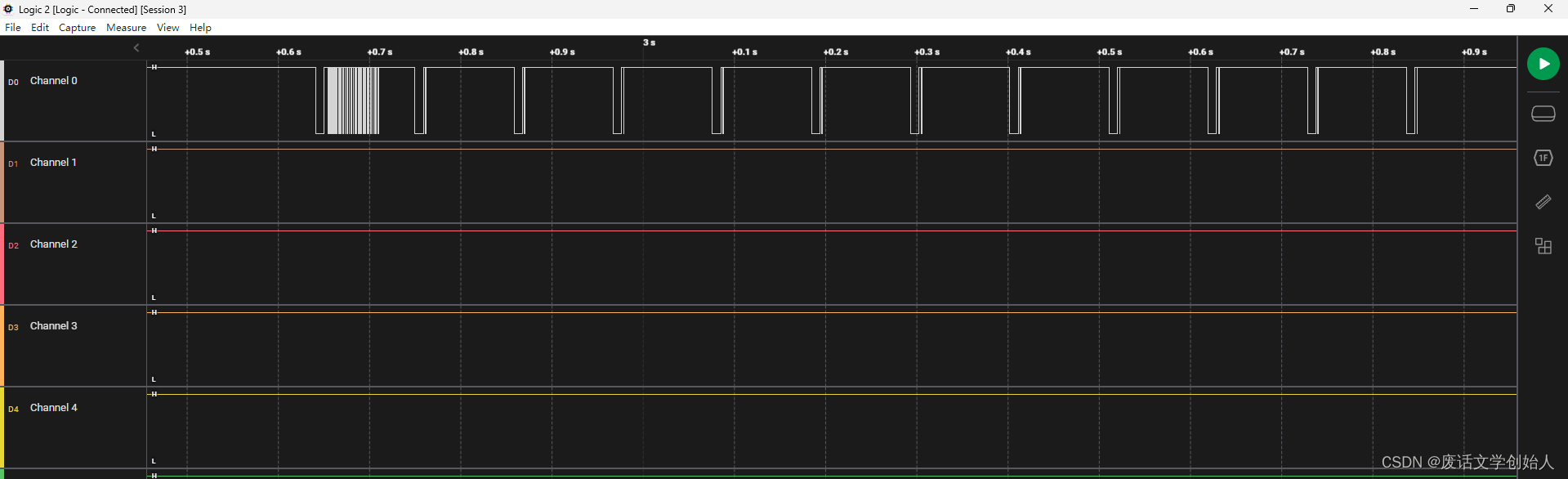
下图是我长按红外遥控按键“1”数秒后松手产生的波形
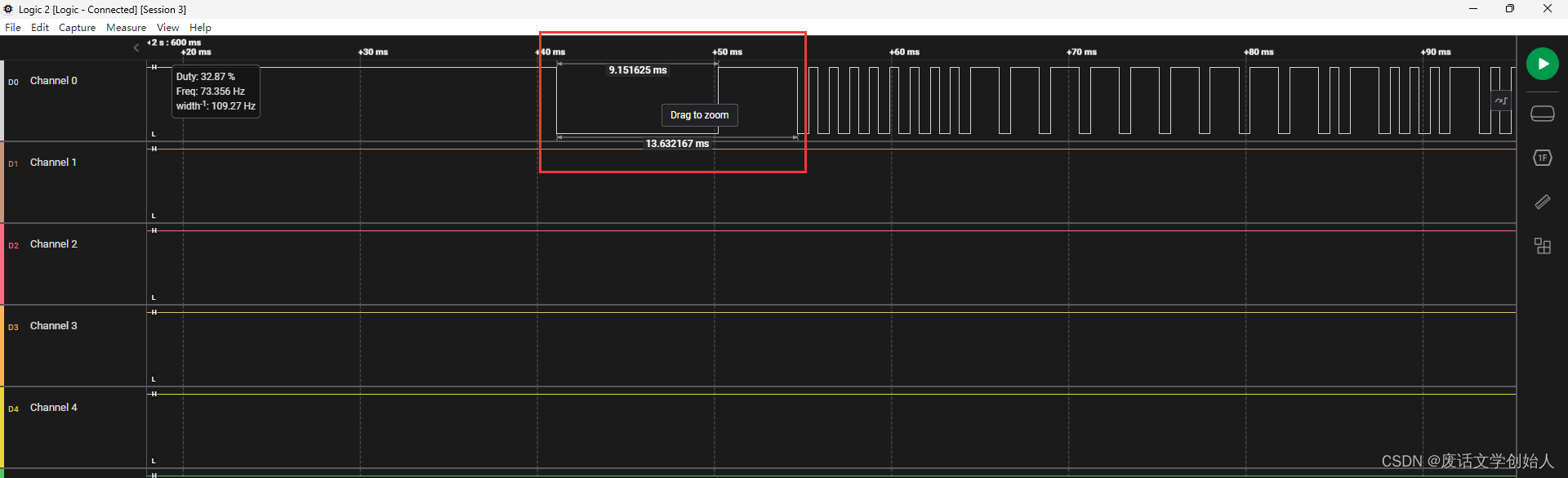
下图是起始信号波形(9ms的低电平,4ms的高电平,总共13ms)
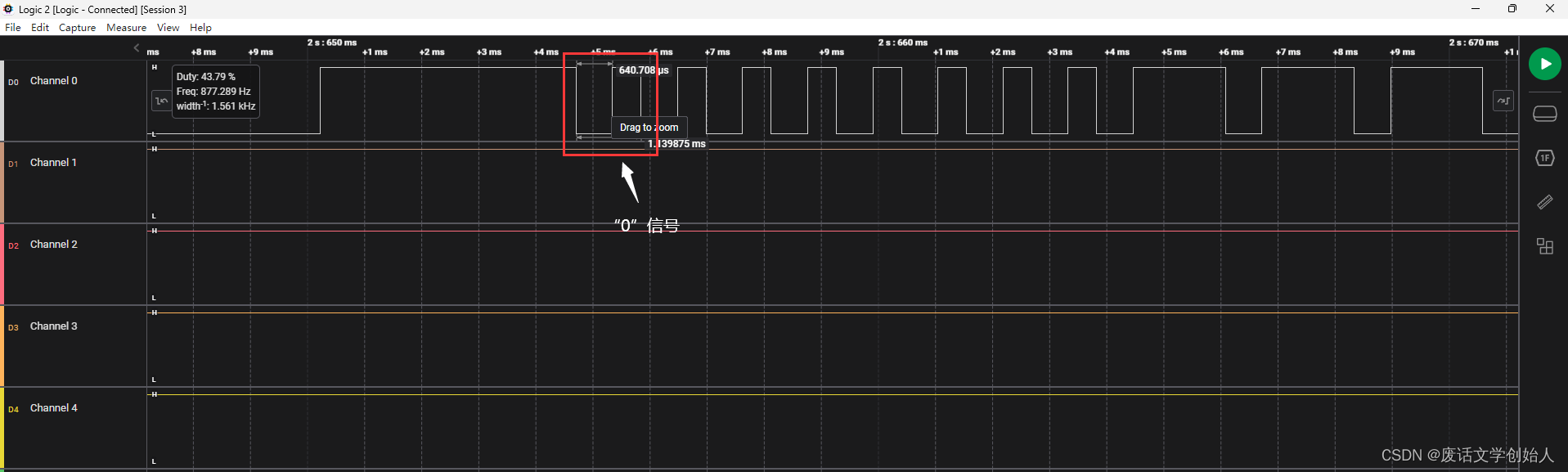
下图是数据帧中的“0”信号(640us的低电平,500us的高电平,总共1.14ms)
下图是数据帧中的“1”信号(640us的低电平,1.6ms的高电平,总共2.25ms)

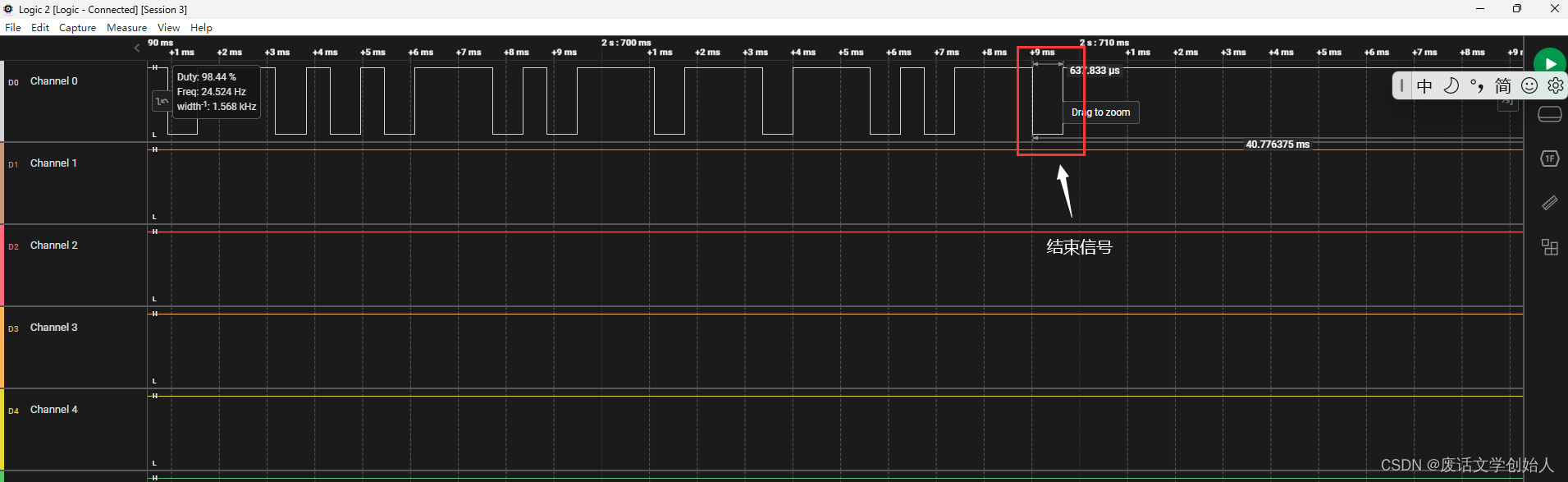
下图是结束信号(640us的脉冲)
下图是重复信号(9ms的低电平,2ms的高电平,总共11ms)
三、硬件资源分析
1.硬件资源与IO使用情况
接收红外信号:PB11,外部中断脚
串口2发送数据:PA2,PA3,串口收发脚
定时器:使用基础计时功能,任意一个即可(我这里使用TIM1)
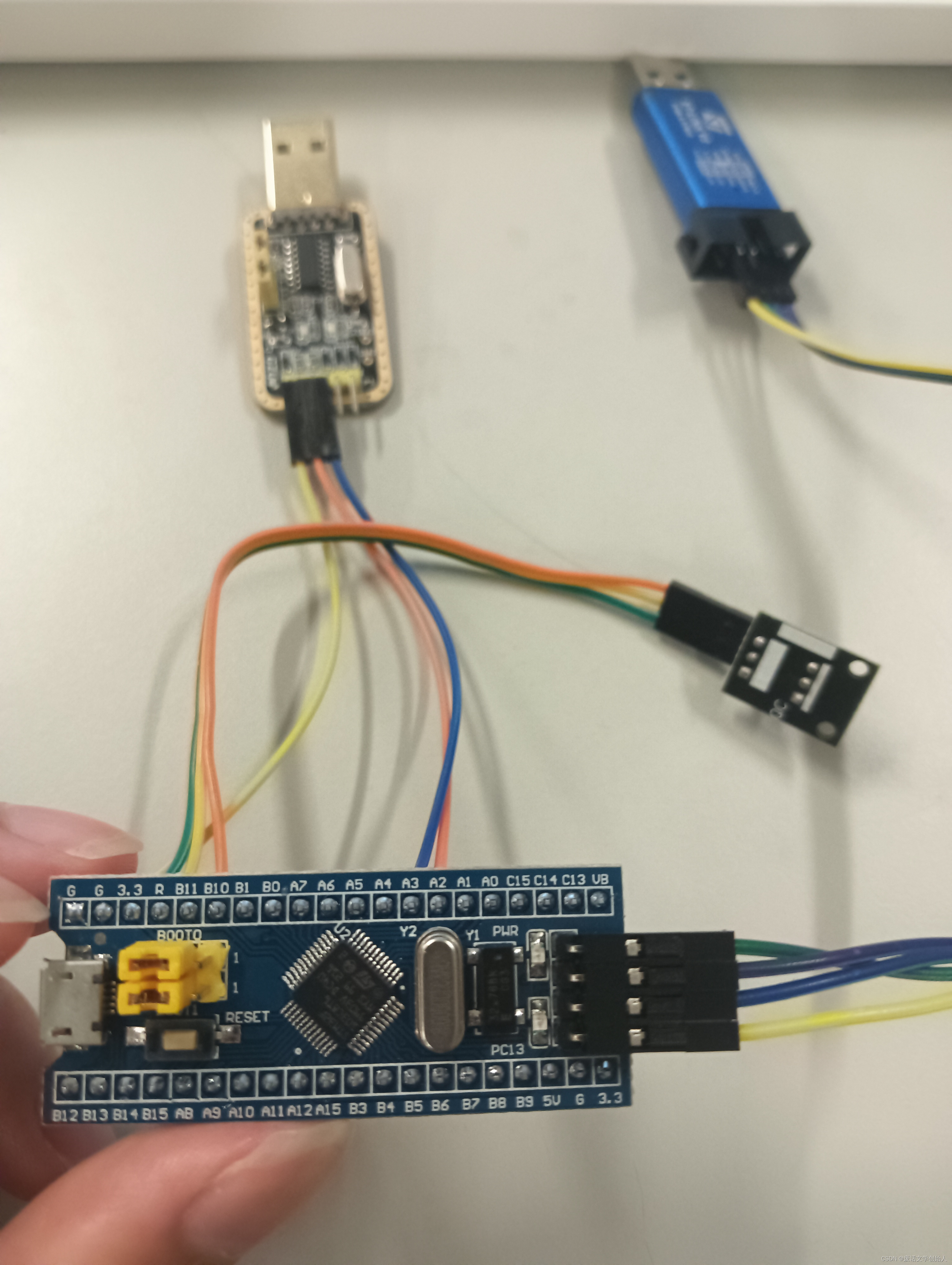
2.实物连接
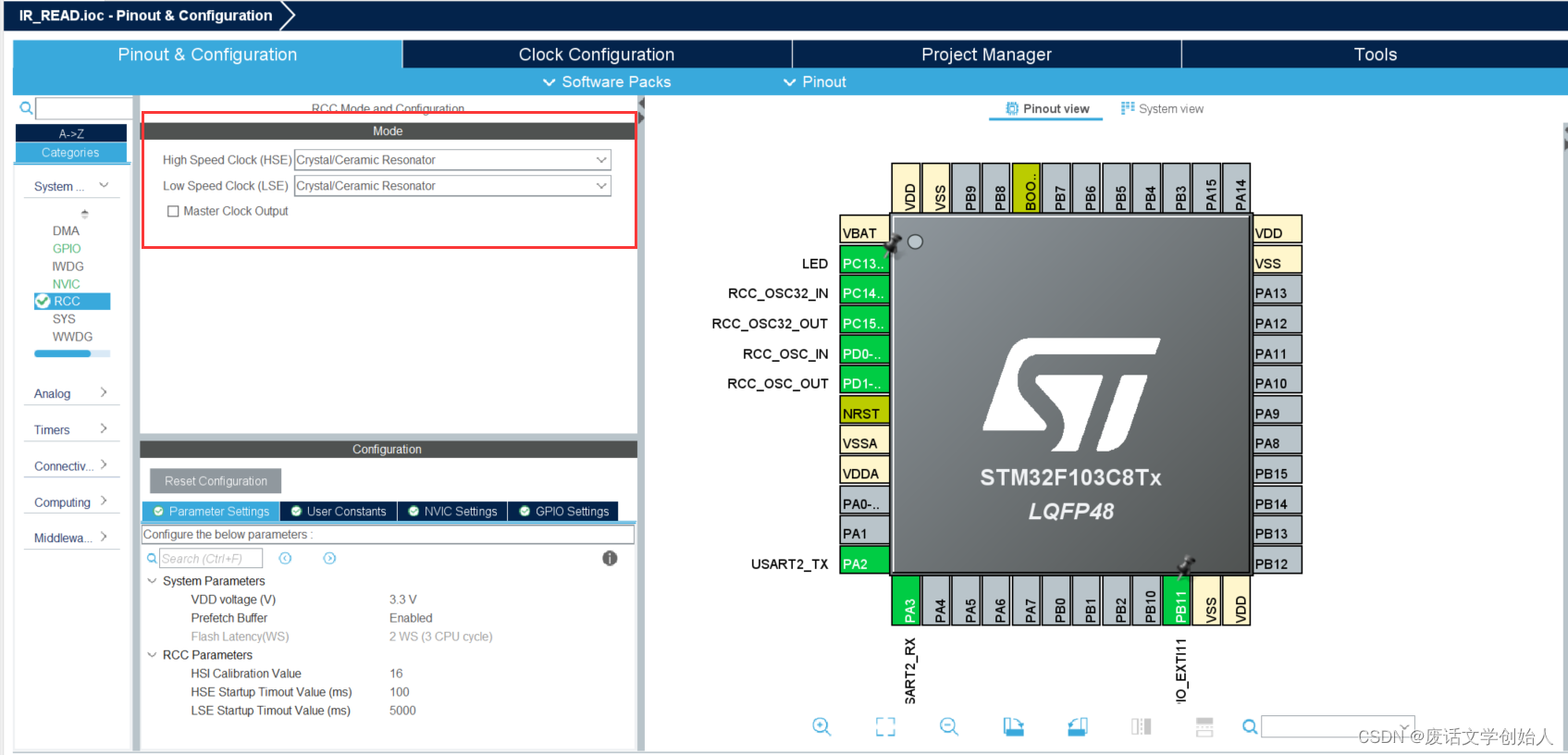
3.图形化配置初始化
- 时钟引脚配置(HSE和LSE均配置为无源晶振,LSE不配也行,这里没用到)
- 教大家一个方法判断板子上的晶振是有源晶振还是无源晶振,直接看他的原理图,如果晶振两端有接起振电容就是无源晶振,没有接就是有源晶振
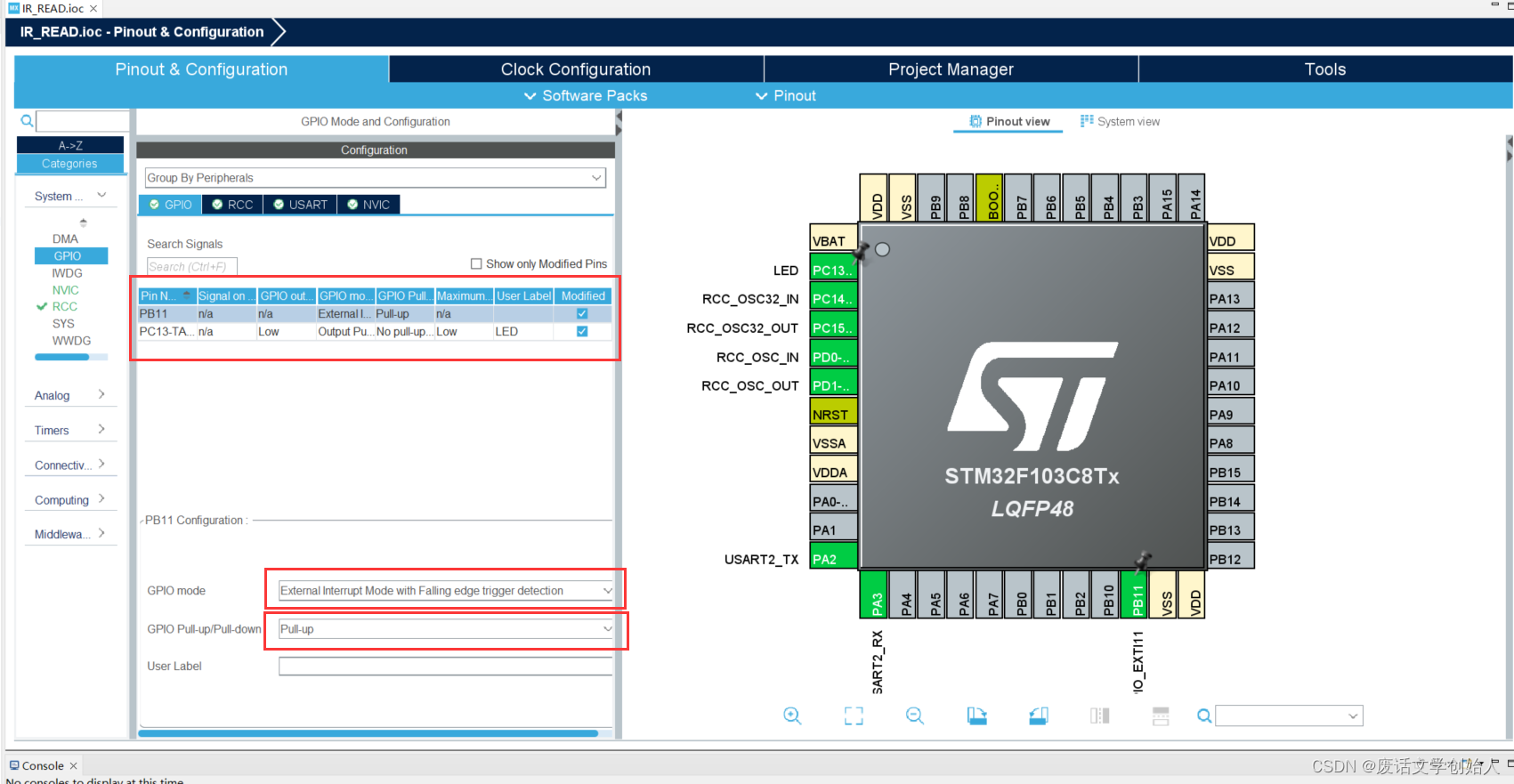
- IO配置(LED参数默认,外部中断脚上拉,下降沿触发)
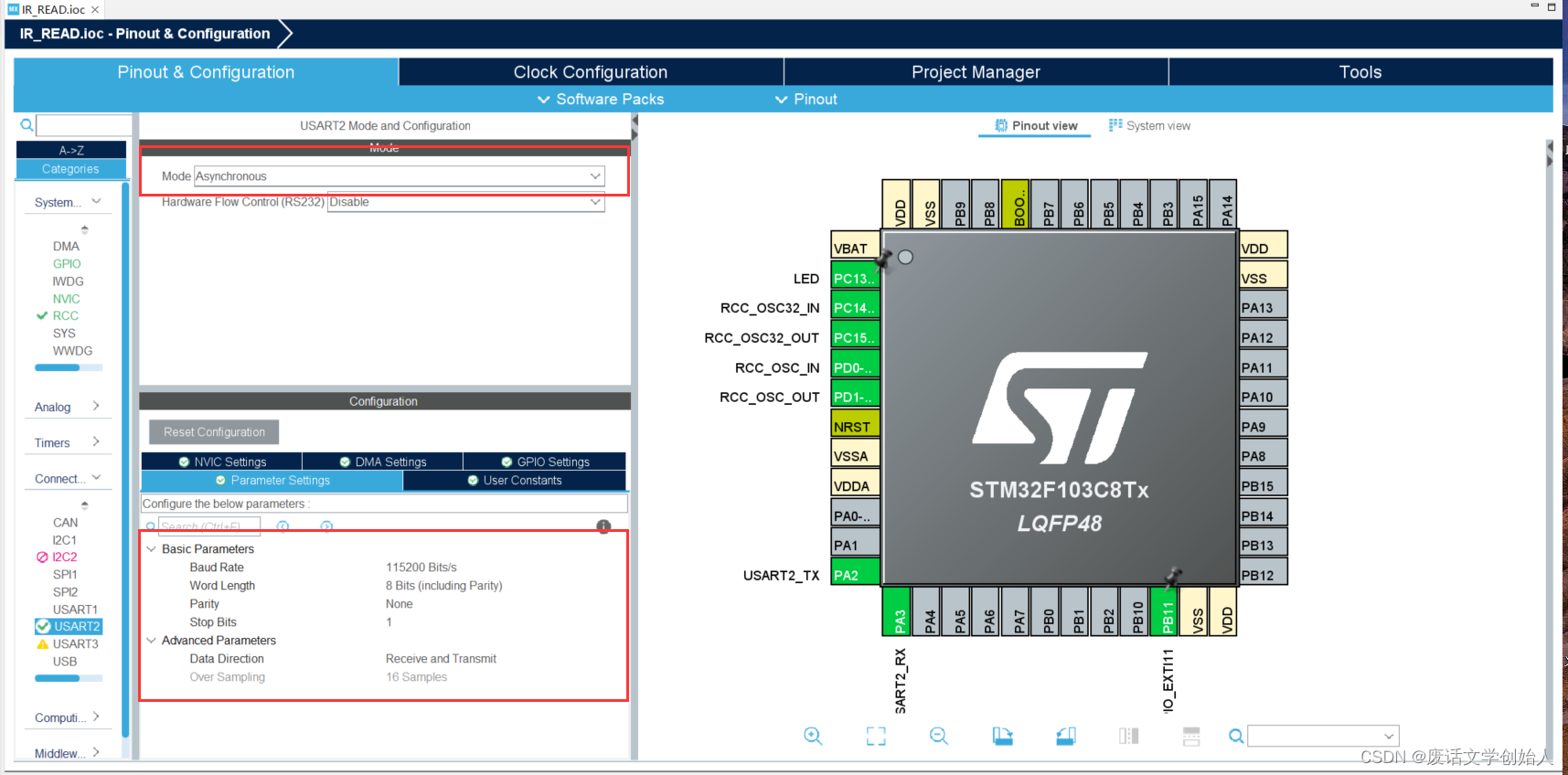
- 串口配置(异步通讯,其他参数默认)
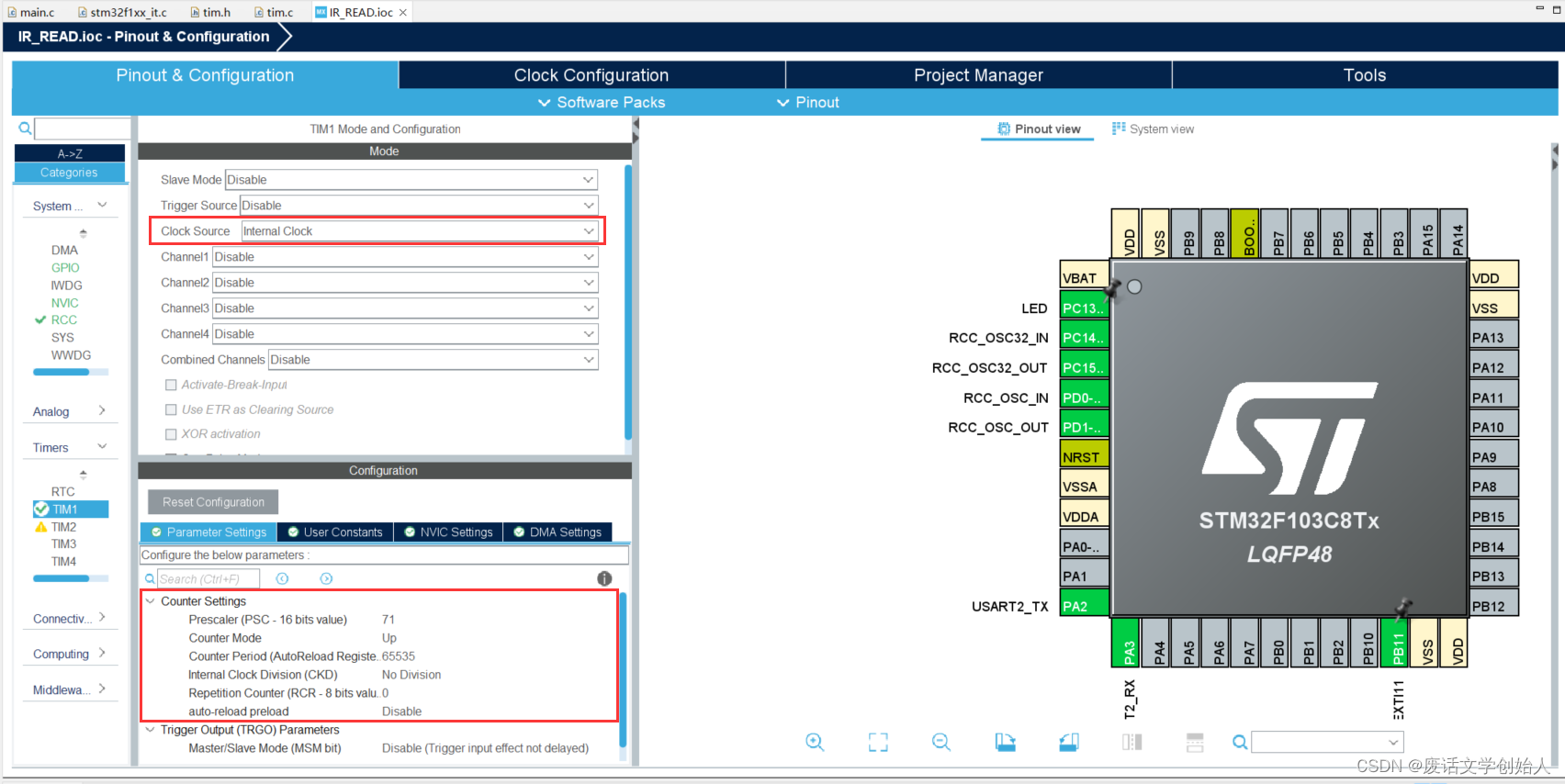
- 定时器配置(时钟源选择内部时钟,预分频系数为72-1,因为时钟会配置为72M,这样计数值加1就是1us,默认向上计数,重载值65535)
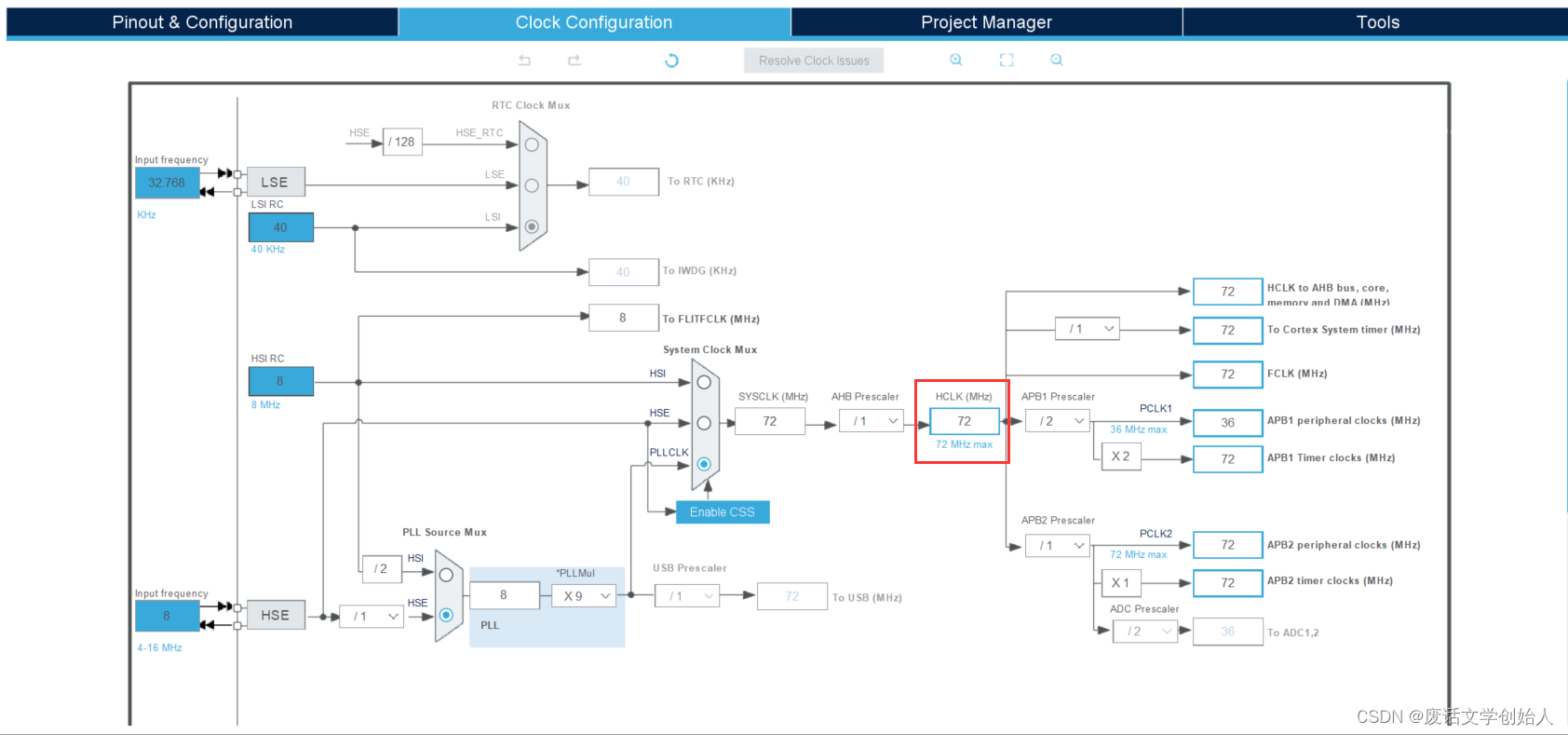
- 时钟树配置(系统时钟72M)
四、基础功能调试
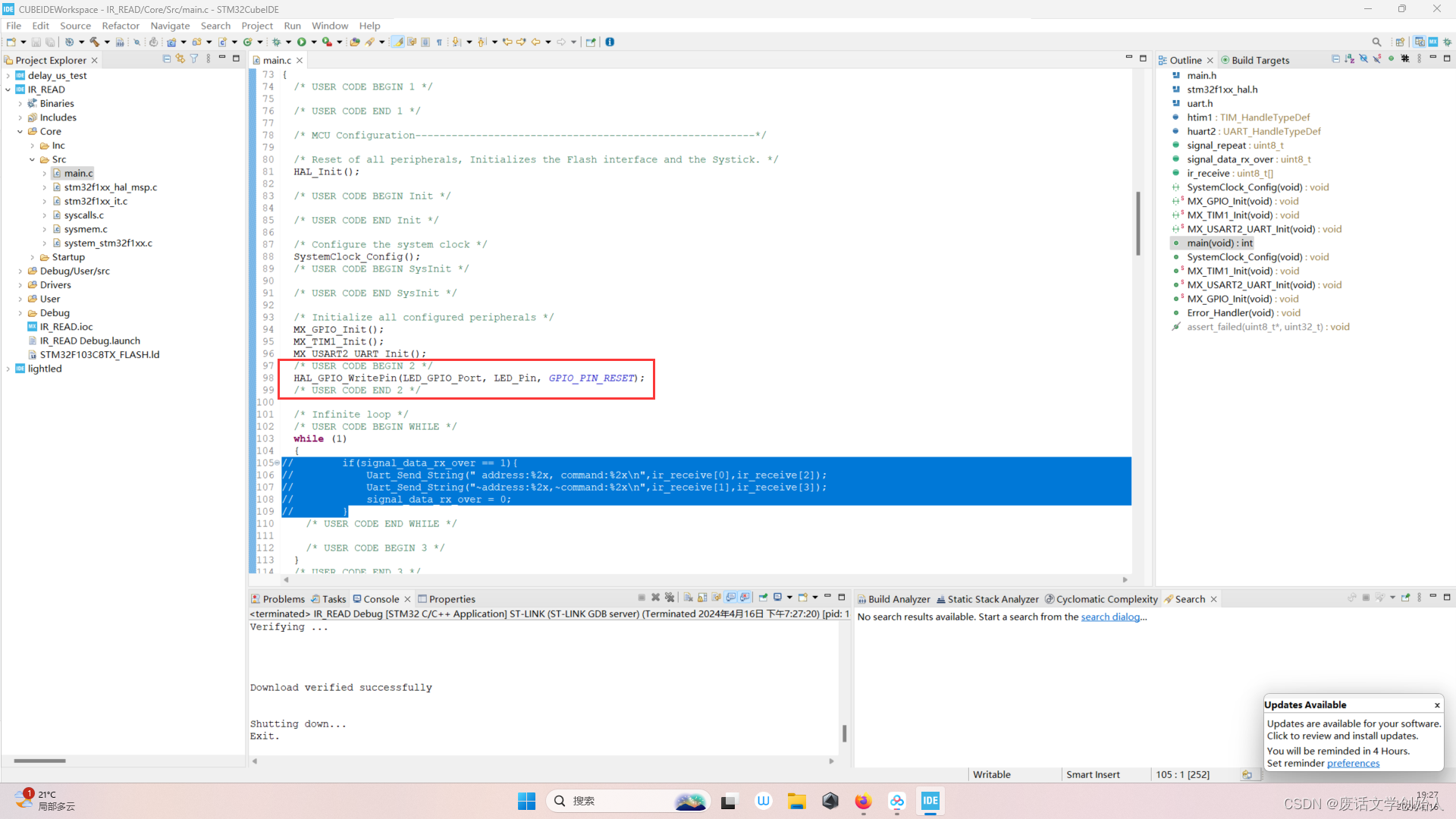
1.LED点灯,看看工程能不能跑,板子是否正常工作
可在用户代码区2给LED写入低电平(我这块板子低电平点亮)。
2.EXIT外部中断验证
代码可以像我这样写,验证可以用杜邦线一端接上PB11,另一端去碰GND,不灵敏是正常的,有反应即可。
3.串口发送验证
串口可以直接移植我封装好的模块,也可以自己写,在while(1)里能输出信息即可。
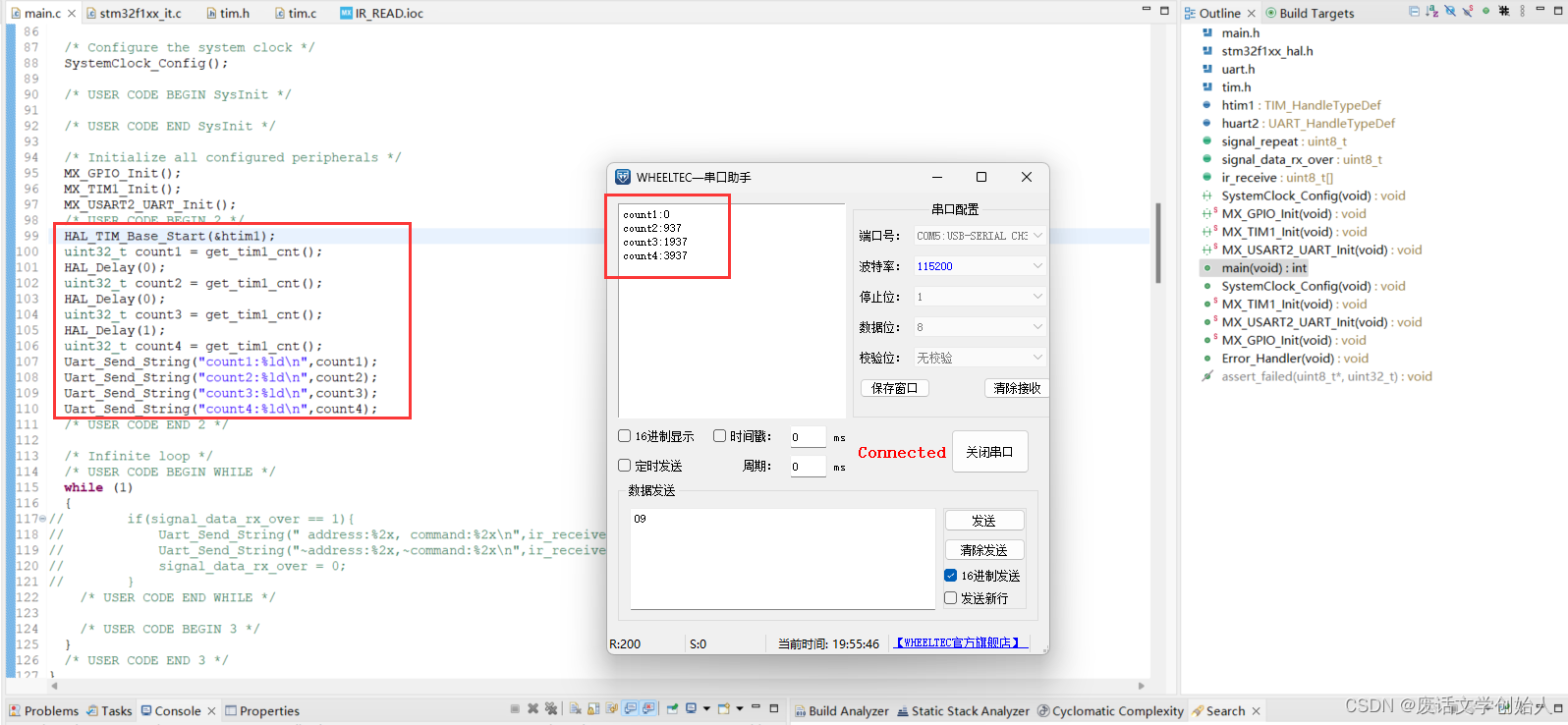
4.TIM计时是否准确
我这里使用官方的HAL_Delay()函数进行粗测。
提醒HAL_Delay()函数是ms级的,不适合做us的延时,而且这个函数延时会多1ms,传参要减一。
代码验证可以参考我的代码,串口发送看下来挺准的。
五、解码程序编写(重点)
先贴代码
- tim.c
/*
* tim.c
*
* Created on: 2024年4月11日
* Author: 废话文学创始人
*/
#include <tim.h>
//设置计数值
void set_tim1_cnt(uint32_t cnt)
{
htim1.Instance->CNT = cnt;
}
//清空计数值
void clear_tim1_cnt()
{
set_tim1_cnt(0);
}
//获得计数值
uint32_t get_tim1_cnt()
{
return htim1.Instance->CNT;
}
//定时器1开始计时
void count_time_start()
{
clear_tim1_cnt();
HAL_TIM_Base_Start(&htim1);
}
//定时器1停止计时
void count_time_stop()
{
HAL_TIM_Base_Stop(&htim1);
clear_tim1_cnt();
}
- tim.h
/*
* tim.h
*
* Created on: 2024年4月11日
* Author: 废话文学创始人
*/
#ifndef INC_TIM_H_
#define INC_TIM_H_
#include <stm32f1xx_hal.h>
#include <stm32f1xx_hal_tim.h>
extern TIM_HandleTypeDef htim1;
void set_tim1_cnt(uint32_t cnt);
void clear_tim1_cnt();
uint32_t get_tim1_cnt();
void count_time_start();
void count_time_stop();
#endif /* INC_TIM_H_ */
- it.c中一些相关变量和宏的定义
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define wait 0
#define start 1
#define data_rx 2
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
uint8_t state = 0;
uint8_t signal_repeat = 0;
uint8_t signal_data_rx_over = 0;
uint32_t count = 0;
uint8_t pdata = 0;
uint8_t ir_receive[4];
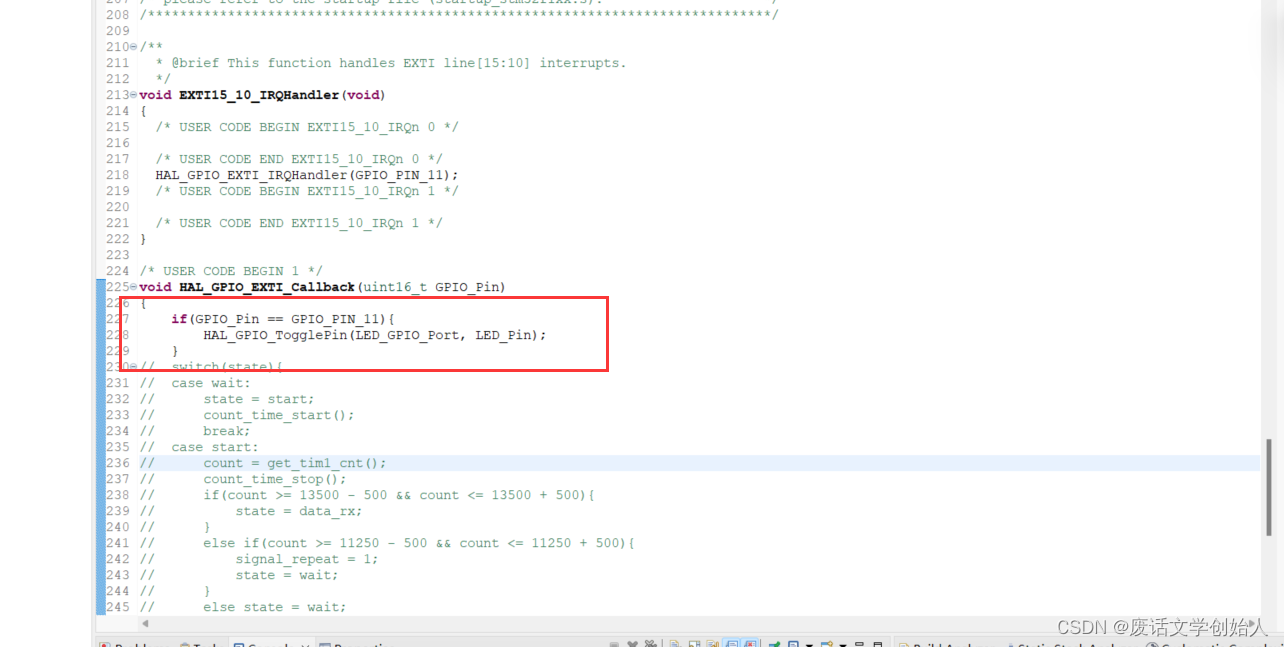
/* USER CODE END PV */- 外部中断回调函数
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
//判断外部中断源是否为GPIO_PIN_11
if(GPIO_Pin == GPIO_PIN_11){
switch(state){
case wait://空闲状态
state = start;
//检测到下降沿开始计时
count_time_start();
break;
case start://起始信号和重复信息阶段
//读取间隔时间
count = get_tim1_cnt();
//停止计数
count_time_stop();
//判断是起始信号还是重复信号
if(count >= 13500 - 500 && count <= 13500 + 500){
//进入数据接收阶段
state = data_rx;
//为数据阶段计时
count_time_start();
}
else if(count >= 11250 - 500 && count <= 11250 + 500){
//反馈重复信号,重回空闲状态
signal_repeat = 1;
state = wait;
}
else state = wait;
break;
case data_rx://数据处理阶段
//读取间隔时间
count = get_tim1_cnt();
//停止计数
count_time_stop();
//数据处理
if((count >= 1140 - 500 && count <= 1140 + 500)){
//向pdata位写入0
ir_receive[pdata/8] &= ~(1 <<(pdata%8));
}
else if((count >= 2250 - 500 && count <= 2250 + 500)){
//向pdata位写入1
ir_receive[pdata/8] |= (1 <<(pdata%8));
}else{
//此分支应对处理接收到的不完全数据帧和下个信号衔接恰好被识别为start信号的情况
state = wait;
}
//pdata位移向下一位
pdata++;
//继续接收下一位byte数据
state = data_rx;
//数据帧处理结束
if(pdata == 32){
//重置pdata为0
pdata = 0;
//利用数据协议的反码数据校验数据准确性
if((ir_receive[0]==(~ir_receive[2]))&&(ir_receive[1]==(~ir_receive[3]))){
//反馈数据处理完成信号
signal_data_rx_over = 1;
}
//重回空闲状态
state = wait;
}
//数据帧未结束,为下次下降沿计时
else count_time_start();
break;
}
}
}- main函数
/* USER CODE BEGIN WHILE */
while (1)
{
//对数据接收完成信号进行处理
if(signal_data_rx_over == 1){
//发送地址码和命令码
Uart_Send_String(" address:%2x, command:%2x\r\n",ir_receive[0],ir_receive[2]);
//发送地址码和命令码的反码
Uart_Send_String("~address:%2x,~command:%2x\r\n",ir_receive[1],ir_receive[3]);
//标志清零
signal_data_rx_over = 0;
}
//对重复信号进行处理
if(signal_repeat == 1){
Uart_Send_String(" repeat.......\r\n");
//发送地址码和命令码
Uart_Send_String(" address:%2x, command:%2x\r\n",ir_receive[0],ir_receive[2]);
//发送地址码和命令码的反码
Uart_Send_String("~address:%2x,~command:%2x\r\n",ir_receive[1],ir_receive[3]);
signal_repeat = 0;
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */思路讲解:
对TIM的基本计时功能进行函数封装,可让代码思路更清晰。(前提是你函数命名没有偷懒)
解码部分参考了别人的状态机解码思路,将长时间的高电平时间段设为空闲阶段,将起始信号和重复信号时间段设为开始阶段,将数据帧信号时间端设为数据接收处理阶段。通过下降沿触发中断实现3种状态之间的迁移。
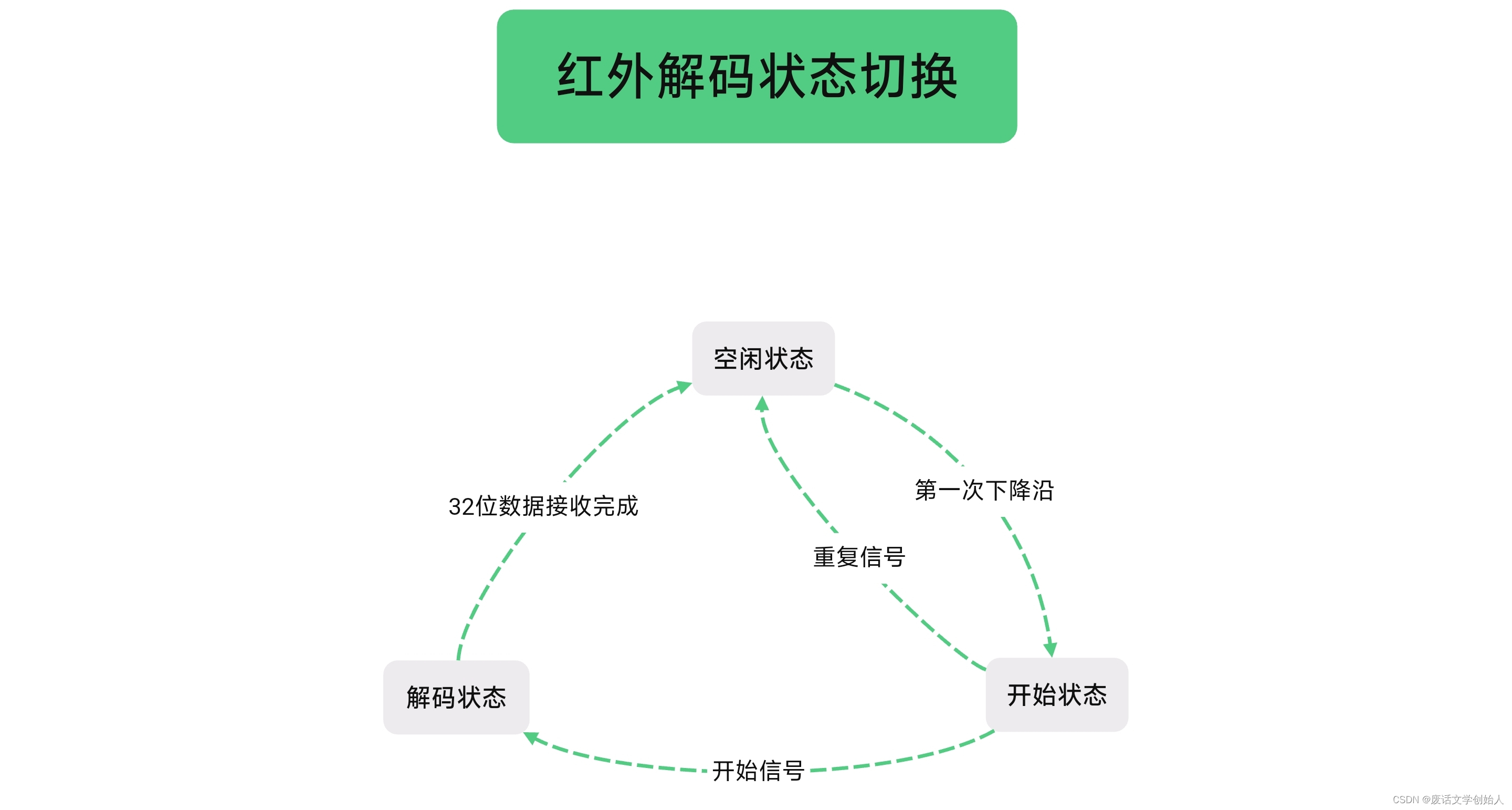
各个信号的下降沿间隔时间有明显区别,利用此特性,计时两次下降沿之间的时间,去判断是何种信号。
数据接收完进行数据校验,具体校验原理是因为他发的数据格式就是地址码-地址码反码-命令码-命令码反码。


















 9980
9980

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











