







矩阵的转置:
矩阵A的行列式 = A转置矩阵的行列式
矩阵乘积的转置 与 矩阵转置的乘积 之间的关系:

推导出:
矩阵乘积的转置 = 矩阵转置的乘积(顺序相反)
转置矩阵的加法与求逆运算
矩阵和的转置 = 矩阵转置的和

矩阵转置的逆 = 矩阵逆的转置
向量的转置:

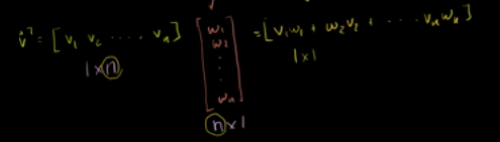
结论:两个向量的乘积(点乘) = 某个向量转置与另一个向量的乘积
行空间和左零空间
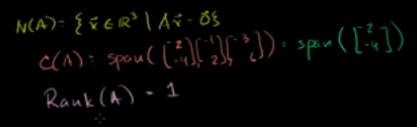
零空间:
零空间就是行最简阶梯型的非主元的线性组合

列空间:
列空间就是主元的线性组合
转置零空间(左零空间):

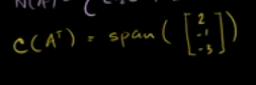
转置列空间(行空间)
列空间 垂直 转置零空间(左零空间)
零空间 垂直 转置列空间(行空间)
矩阵的秩 = 矩阵列空间维度 = 转置矩阵的秩 = 矩阵行空间维度
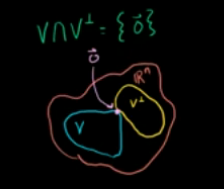
正交补:
某个子空间v,它的正交补记作:
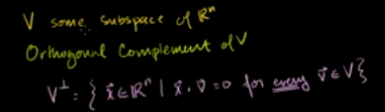
v的正交补是符合如上条件的x的集合。
Rn中,一个矩阵v的列空间的正交补就是v的左零空间。
v的秩(列空间纬度) = v转置的秩(v转置列空间纬度 或者 v行空间纬度)
v转置的秩 + v转置零空间(左零空间)纬度 = n
v的秩(列空间纬度) + 左零空间纬度 = n.
Rn中的一个子空间v的纬度 + v的正交补空间的纬度 = n
一个子空间v 与 v的正交补空间的交点 就是0向量。他们重合的元素只有0.
v的一组基 + v补的一组基 = Rn的一组基。
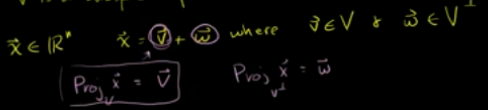
v属于Rn子空间,x属于Rn,则一定有v1,w1使得 x = v1(v1属于v) + w1(w1属于v补)
任何子空间的正交补的正交补就是原来的子空间。
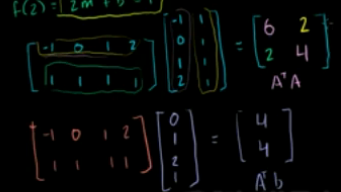
(A转置)A是可逆:
如果A各列线性无关,则 (A转置)*A是方阵且可逆。证明略。
正交补与投影
向量x投影到子空间v,则x另一部分的投影在v补上。
可以做如下定义:
v属于Rn子空间,x属于Rn,则一定有v1,w1使得 x = v1(v1属于v) + w1(w1属于v补)
子空间投影是线性变换:
子空间v的一组基 b1,b2…bk;
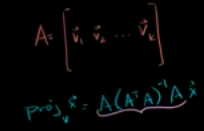
定义矩阵A(b1,b2…bk)
那么,子空间里的任意一个向量 都可以用矩阵A(b1,b2…bk)点成向量y(矩阵A列向量如何组合)来表示。y未知。
可以取到合适的y来线性组合矩阵A的各个列向量来表示v上的任意一个向量。

向量x在子空间v中的投影 可以用矩阵A点成y的形式表达。这样就可以求出任何物体(由向量构成)投影到子空间(比如屏幕)后的表达形式。

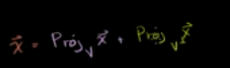
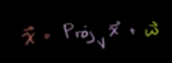
由于向量x = x在v上的投影 + x在v补上的投影
或者令w = x在v补上的投影,即:
由于,子空间v相当于矩阵A的列空间,所以v补 = 矩阵A的左零空间(A转置的零空间)。
所以,A转置点成w(x在v补上的投影) = 0
所以,x在v上投影用Ay表示后并展开得到:
因为:如果A各列线性无关,则 (A转置)A是方阵且可逆
所以,A转置点乘A是可逆的,所以y有解。
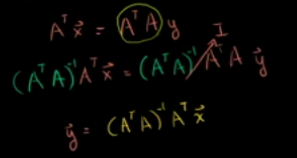
那么x在v上的投影就可以写成通式:
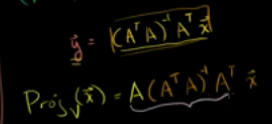
投影=矩阵点成向量的形式,也说明了投影是个线性变换。
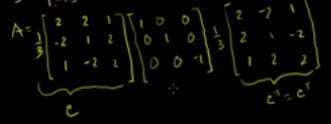
也说明了 如果已知一个子空间的基向量,那么就可以构建一个矩阵A(由子空间基向量作为列向量)。通过这个矩阵可以求得任意向量在这个子空间的投影。也就是通过这个矩阵能够构建出投影变换矩阵。其形式就是:
例:
已知一个子空间v的一组基,求将向量x投影到这个子空间的变换矩阵。



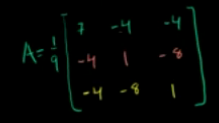
所以,该变换矩阵就是一个1/3A(4*4),该矩阵是一个四乘四的方阵。
投影是子空间中距离原向量最近的向量
每个向量都可以理解为一个点,所以这里讨论的距离就是两点间的距离。

证明略
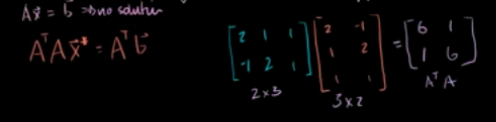
最小二乘:
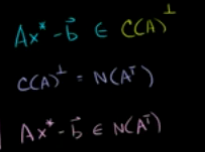
如果矩阵Ax=b 无解,说明b不在A的列空间内。
那么A的列空间内存在一个距离b最近的向量,利用这个向量来估计b。
就是最小二乘估计 或 最小二乘逼近。
即在A列空间内寻找一个向量y,使得y与b最近。
显然,这个距离b最近的向量就是b在A的列空间的投影。
即用投影代替b,求出的解是最优解。
根据公式求投影有些麻烦,我们来寻找一个简单的最小二乘的求法:
两边同时减向量b:
显然,投影向量减去b向量得到的是垂直于A列空间的向量。也就是A的列空间的正交补,也就是A的左零空间。
所以:
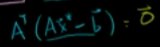
继续化简得到:
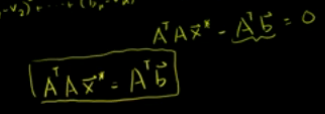
即:
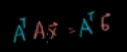
也就是当我们求Ax=b无解时,只要在两边同时乘以A的转置,就可以求出Ax=b的最优解。
最小二乘例题:
三条直线求交点

显然这三条直线没有相交于一点,所以方程组无解。
那么,利用最小二乘估计求出一个最接近的点 来近似估计这个交点。
即:
求出:

最小二乘例题:
已知4个点,求过这四个点的直线?
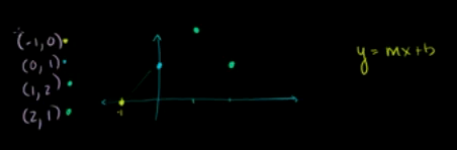
显然无法求出过四点的直线,则利用最小二乘估计 近似 求出距离四个点最近的一条直线。
首先设该直线为 y=mx+b,带入这四个点坐标,构建矩阵。
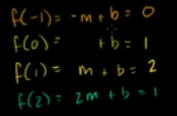
可见,该方程组无解。
构建矩阵:
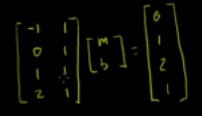
利用最小二乘 求出近似的 m,b
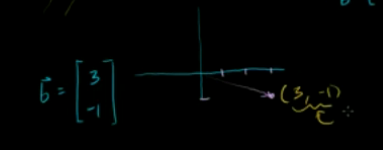
基变换:
已知向量b(3,-1),指的是在标准基下,
即:
基底为v1,v2时 ,坐标变化图:

某基底B和标准基底下向量的转换:
C为B基底矩阵,a为标准基底下的向量
 为B基底下的向量
为B基底下的向量

矩阵C把基底为B的向量改变到标准基底下,所以C就是基的变换矩阵。
已知基底B和基底B下的向量(7,-4),求该向量的标准基坐标:
基底B下的坐标是2维,标准基下的是3维。因为基的变换矩阵列空间是在R3中的子空间。
子空间向量向R3空间转换

已知标准基底下的向量(8,-6,2),求该向量在基底B下的坐标:
利用增广矩阵消元,求出为(-3,11)
也就是R3空间向量向子空间转换

特殊情况:
如果基变换矩阵是可逆的,则:不需要建立增广矩阵消元解出基底B下的向量,用该基变换矩阵的逆乘以标准基向量就可以了
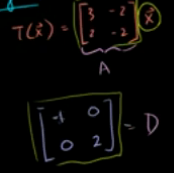
基底变换的情况:不同基底下的矩阵
向量在不同的基底下有不同的表达,矩阵在不同的基底下也有不同的表达。
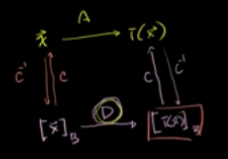
同一个变换(变换效果相同)在不同基底下 表现为不同的矩阵。
A表示在标准基下的变换 ,D表示在B基底下的相同变换。
所谓相同变换是指:Ax=b , Dx(B)=b(B)即D乘以基底B下的x=基底B下的b

处理后得到:
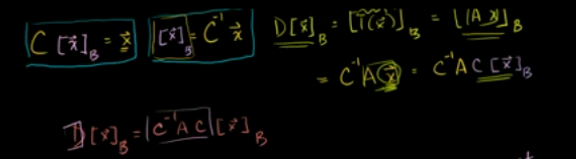
即:基底矩阵有逆矩阵
当B基底构成的基底矩阵为可逆时,标准基换成B基底后,变换矩阵A相应的变为基底矩阵C的逆乘以A再乘以基底矩阵C (C为B基底的基底矩阵)

继续推导:
例子:


证明A和D是同一个变换,只是基底不同:

总结:
线性代数是一门选择合适基底的艺术
以下两个变换相同,基底不同,明显D变换使用的基底 能使运算更简单。
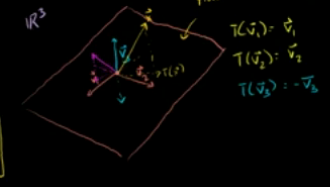
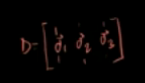
换基底求变换:
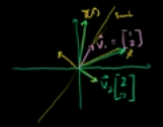
求x关于L对称的点的转换矩阵:
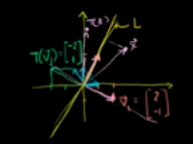
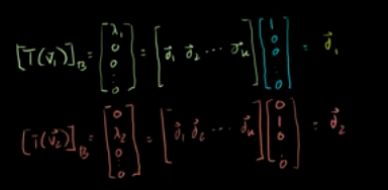
此变换关于L对称,如果L作为坐标轴来看的话,计算起来就会简单很多,所以把标准基换成v1(2,-1),v2(1,2)基底(下图基底B有误),在此基底下的变换为矩阵D,标准基下的变换为矩阵A。则

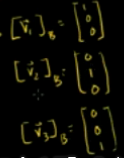
那么 v1在此基底B下的向量为:(1,0) v2在此基底下的向量为(0,1)
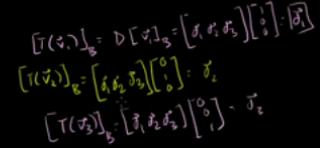
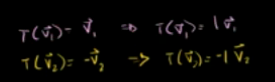
由此可见,在基底B下 矩阵D将v1,v2 变换到 -v1,v2.
由于v1,v2在基底B下坐标的特殊性,可以很容易求出矩阵D

求出D后 即可通过
计算出标准基下的变换矩阵A。
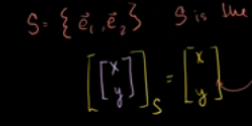
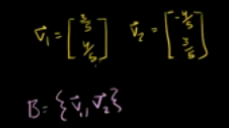
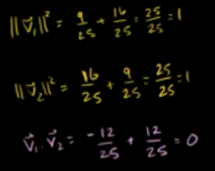
标准正交基:
一组基 每个向量长度为1,且互相垂直。
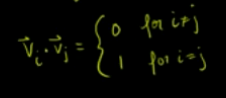
符合以上条件的向量集 必然线性无关,是一组基,证明略
标准正交基在运算中的特点:
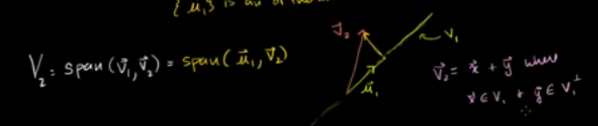
x是标准基下的向量,属于子空间V
c(权重)是B基底下的向量坐标
v是B基底的基底元素

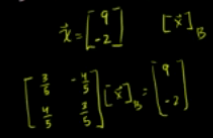
例:
B为标准正交基的子空间
已知标准基下向量x(9,-2),求B基底下的x向量
B不是标准正交基的情况下:
B是标准正交基的情况下:
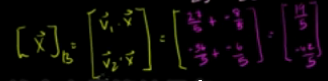
标准正交基下求投影的简化:
非标准正交基求投影:下图写法有误,第四项应该是A的转置
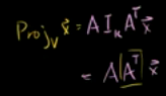
标准正交基求投影:
由于标准正交基的基变换矩阵有如下特点:
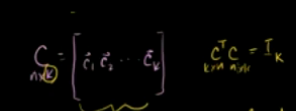
所以
投影矩阵计算:

构造镜像变换:
已知v1,v2,v3 ,他们是一个正交集,是R3的一个正交基底。
v1,v2张成一个平面子空间。v3垂直这个平面。
已知向量x属于R3,求x关于这个平面的镜像的变换矩阵。
构建基底:
x属于R3,定义在标准基下,这时构建以v1,v2,v3为基底的坐标系,将使该变换更容易解决。
B{v1,v2,v3}基底构成的矩阵C为方阵,所以
C的转置=C的逆

所以在B基底下 v1,v2,v3的值为:
设新基底B下的变换矩阵D为:
所以基底B下的这个变换可以表示为:
以为基底B下的该变换为:
所以
即基底B下的变换矩阵D为:
因为:
即:
正交的基底矩阵的保角性和保长性。C为正交基底矩阵(由标准正交基构成)
通过一组非标准正交基获得一组标准正交基的方法:
找到对应向量,出以该向量的模
互相垂直的向量通过投影的方法来找

特征向量和特征值:
当我们在寻找一组基使变换的表达更加简单时,通常需要找到一组标准正交基,而这组基 通常能够使这个变换容易实现。
这组基在该变换下通常只是改变缩放比例或调转方向。
能够用如下表达:
例如镜像变换
他的变换表达在换基之后为:
由于这些缩放比例对于定义基时很有用,因为在那些基下计算矩阵就变得简单了
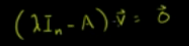
所以 任何向量满足如下等式
该向量叫做 特征向量,缩放比例叫做特征值。
所以特征向量通常是我们要寻找的基向量。
如下,v叫做矩阵A的特征向量
通过特征向量可以容易的找到该变换的一组基,使计算更容易。
很多变换寻找标准正交基并不把么容易,通过特征向量可以容易的确定一组基。
尝试寻找特征向量和特征值:
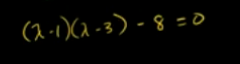
也就是寻找如下等式的解(零向量除外,因为零向量对构建一组基没有价值)
 、
、
相当于

因为v不等于0,v在该矩阵的零空间,且假设该等式有解,说明该矩阵的列必然线性相关,零空间不是只包含0元素。
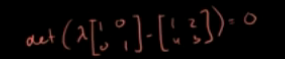
所以如下矩阵必然有线性相关的列,不可逆,行列式=0,零空间包含非平凡元素,零空间不仅仅包含零元素。

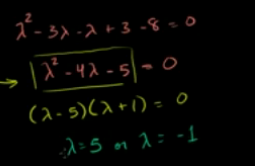
求解矩阵特征值:
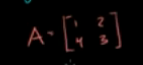
如下矩阵行列式=0
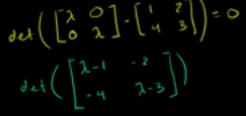
定义特征空间如下,特征向量构成的子空间。也就是如下矩阵的零空间
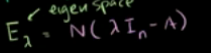
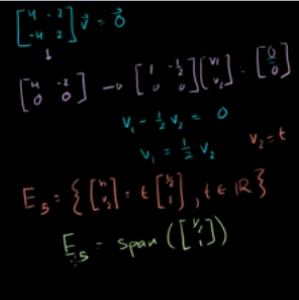
特征值=5时,特征空间就是如下矩阵的零空间
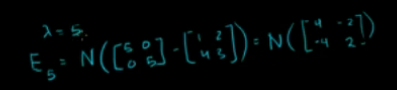
计算出这个矩阵的零空间为(1/2,1)
特征值=-1时,特征空间就是如下矩阵零空间,且求出零空间
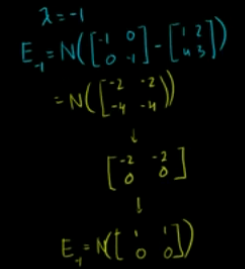

特征空间里的任意一个向量都是对应该特征值的有效特征向量
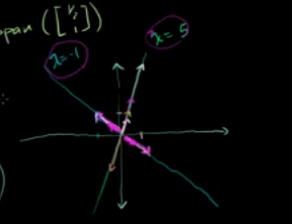
所以,矩阵A的特征值是-1和5,特征向量无限多个。特征向量张成的特征空间为如图的两条直线。
特征基有利于构造合适的坐标:
假设有变换如下
v1,v2…vn是矩阵A的特征向量,这些特征向量构成该空间的一组基,叫特征基。则
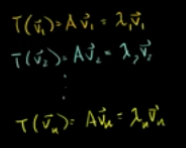
则
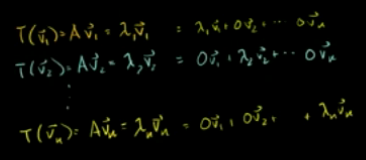
则















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









