







 本文介绍了如何使用Protege创建OWL知识图谱,包括定义类Block和Position,建立hasPosition关系,创建数据属性x_position、y_position、z_position,以及为实例添加坐标数据。最后,通过Python程序实现对知识图谱的数据读取和写入。
本文介绍了如何使用Protege创建OWL知识图谱,包括定义类Block和Position,建立hasPosition关系,创建数据属性x_position、y_position、z_position,以及为实例添加坐标数据。最后,通过Python程序实现对知识图谱的数据读取和写入。
Protege下载链接:(windows下载)https://codeload.github.com/protegeproject/protege-distribution/zip/refs/tags/v5.5.0
下载后解压,打开
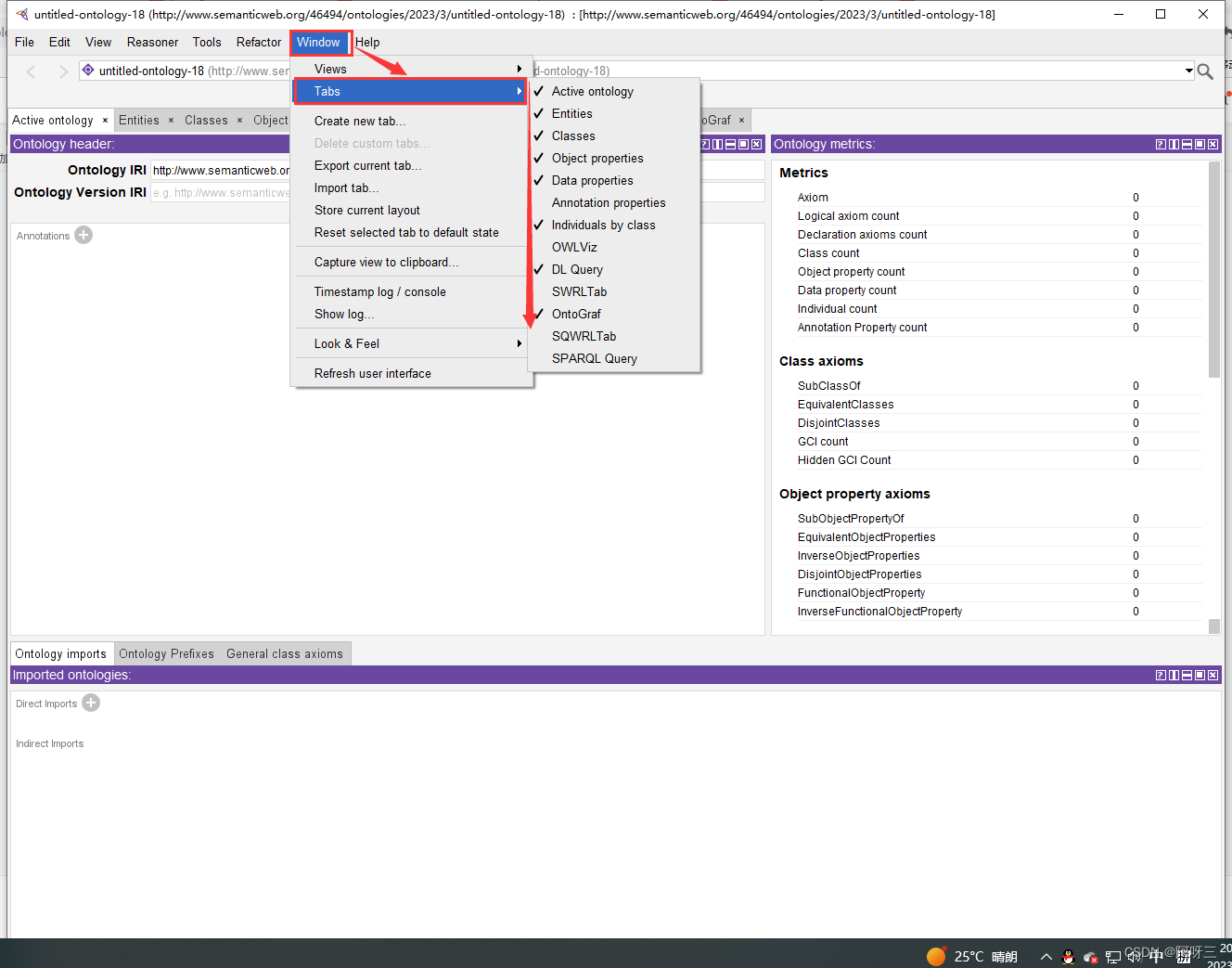
按照如图所示,勾选相应的功能:
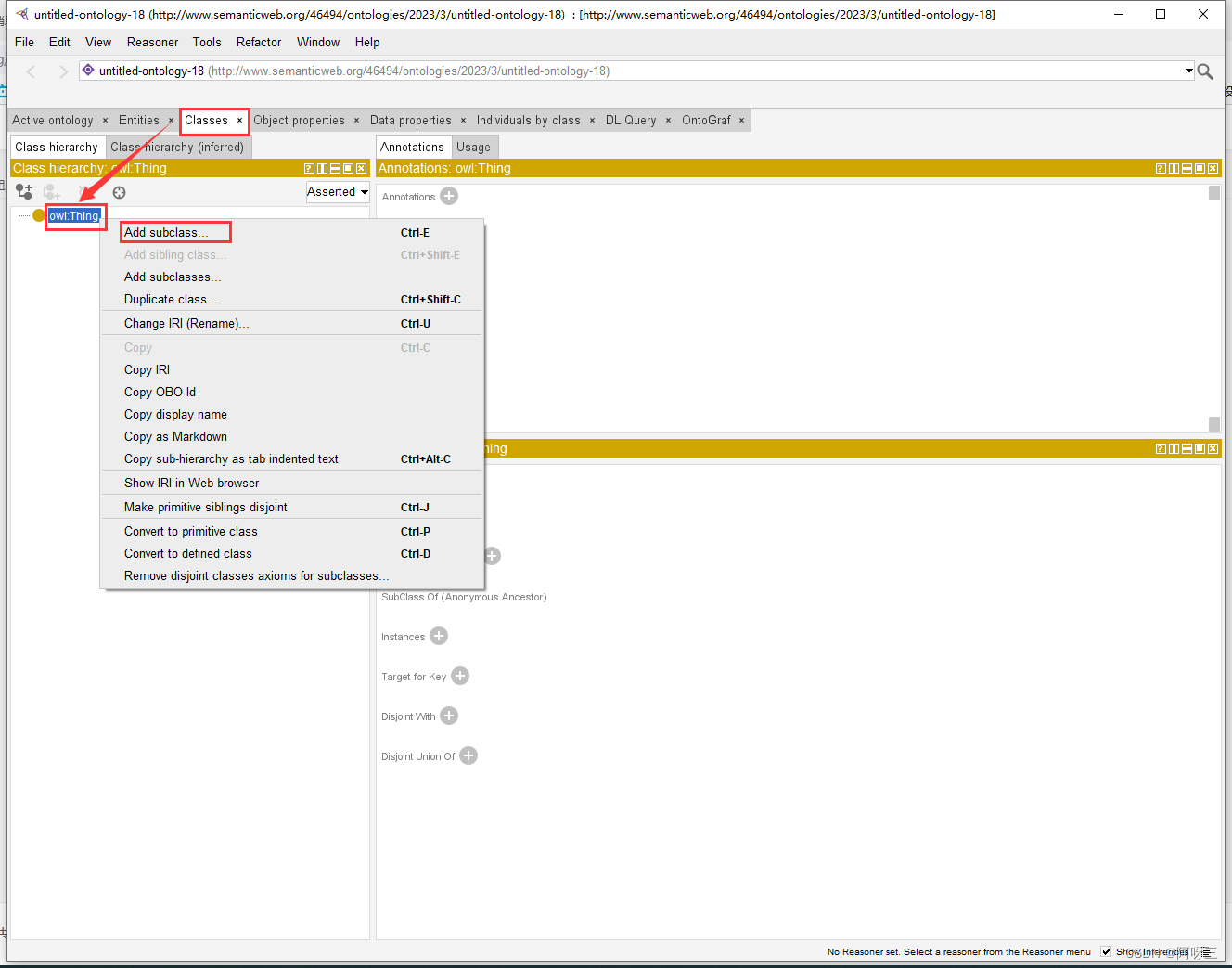
点击Classes,点击owl:Thing,右键创建“类”:
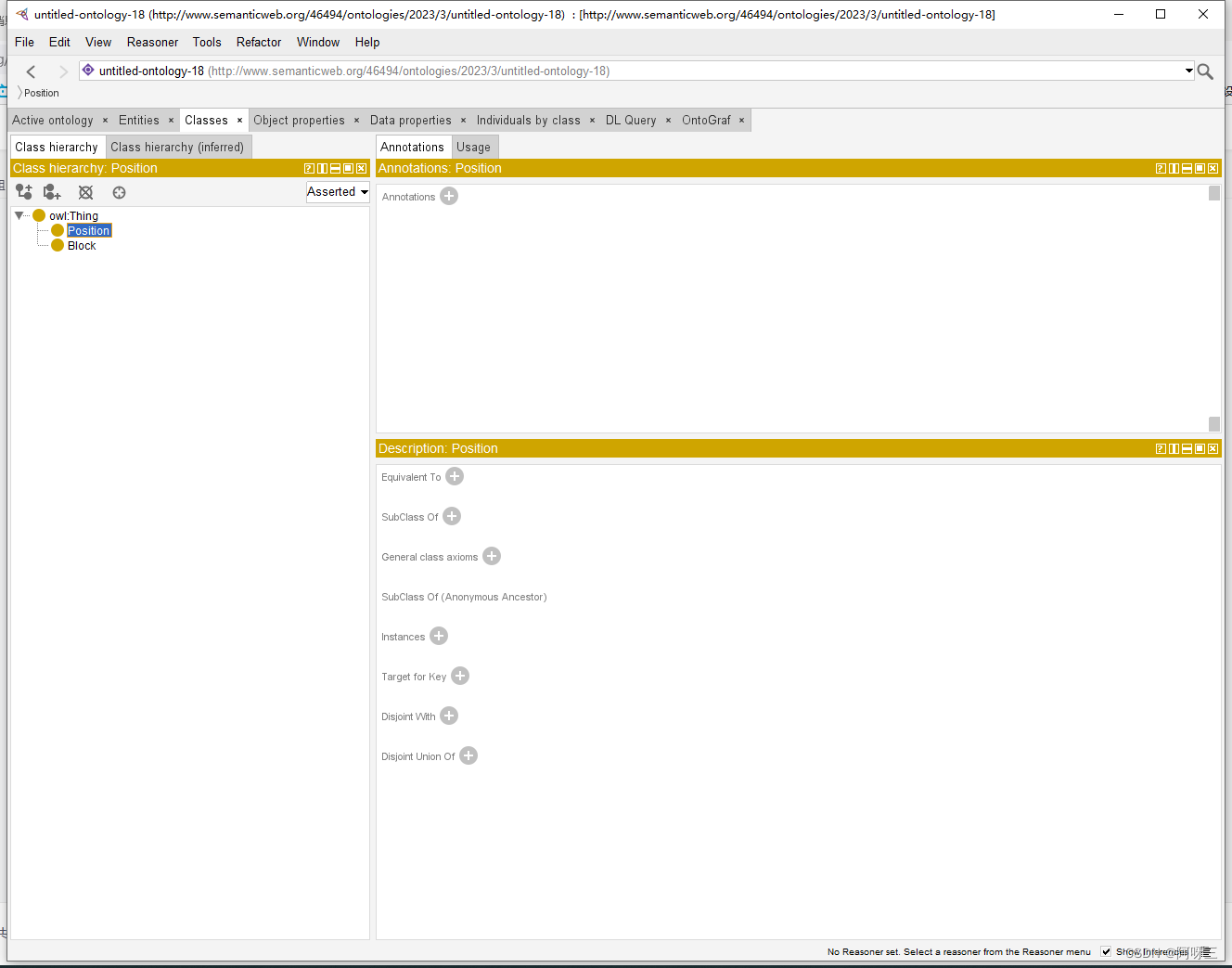
我们这里创建了两个类Block(方块)和Positon(位置):
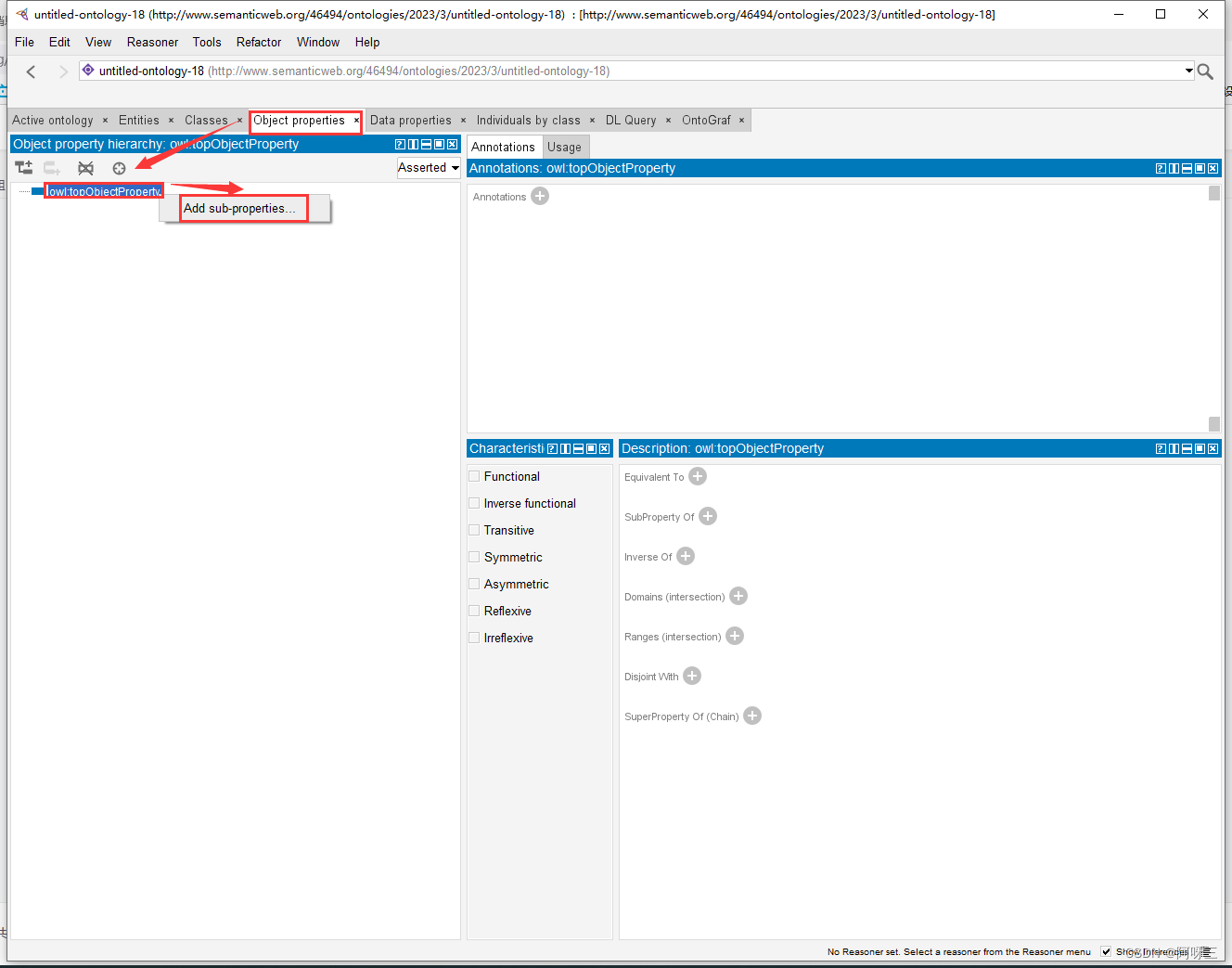
然后点击Object properties,点击owl:topObjectProperty,右键创建关系:
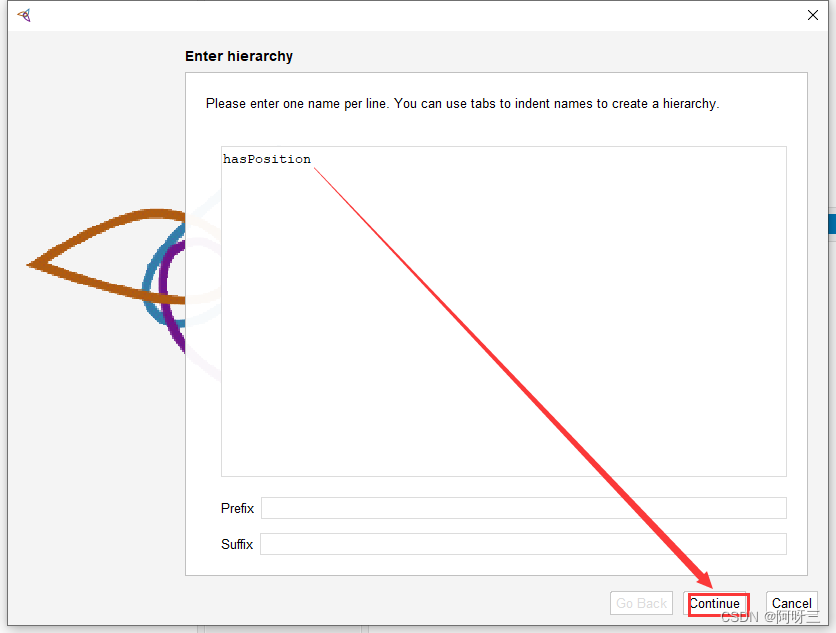
输入hasPosition
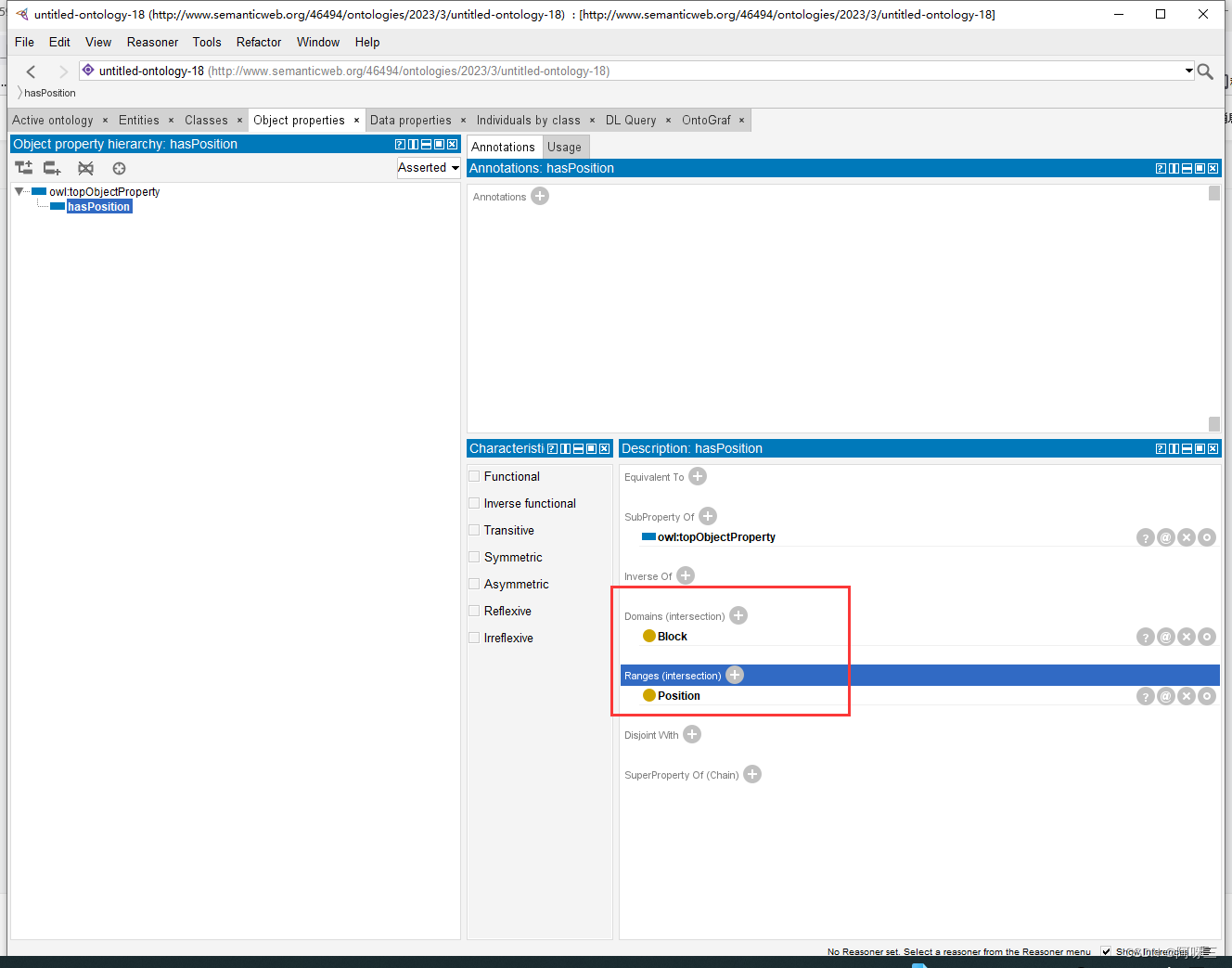
创建完成后单击hasPosition,点击右边Domain旁边的加号,再点击Ranges旁边的加号
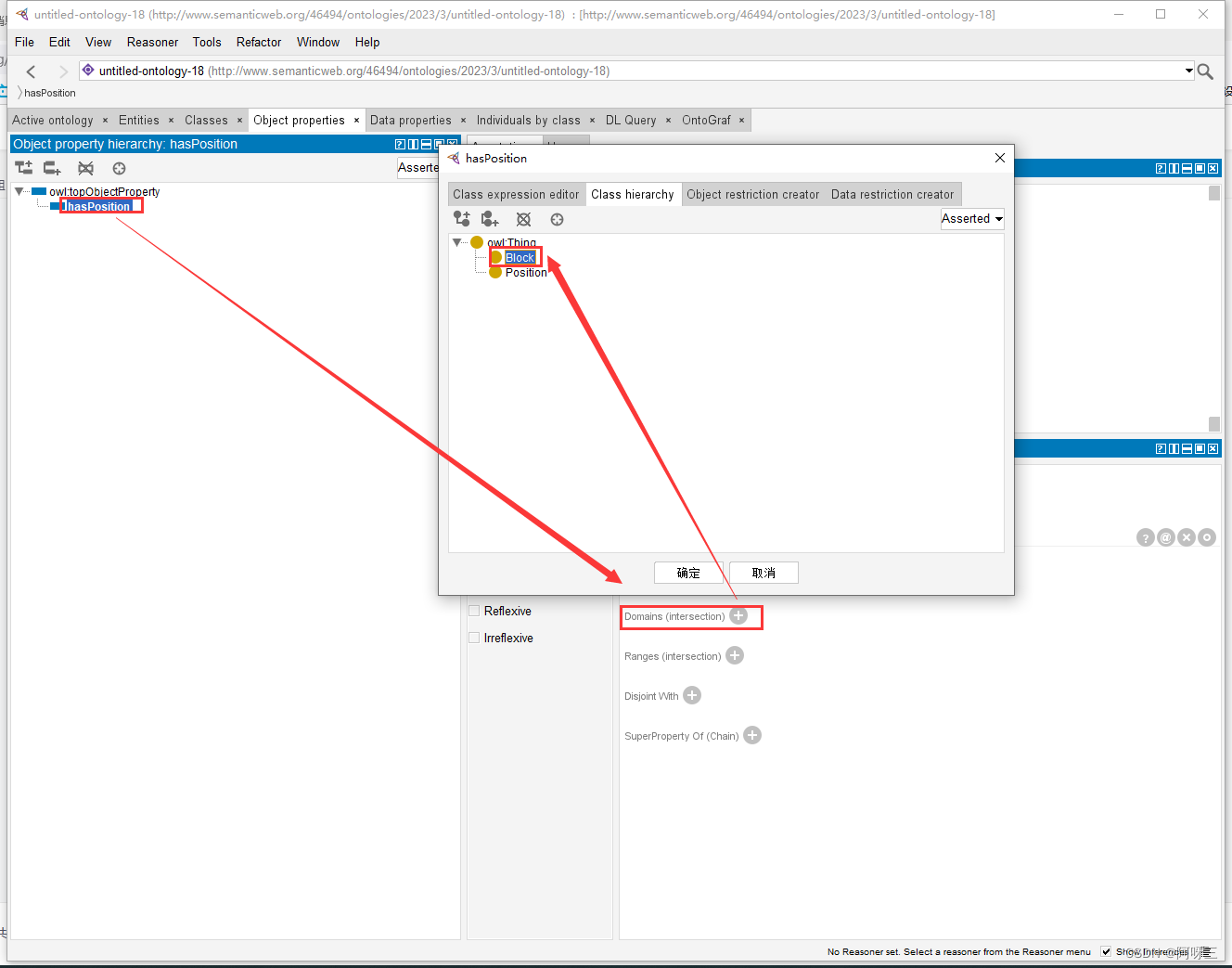
这样Block和Position之间就有了hasPosition的关系了
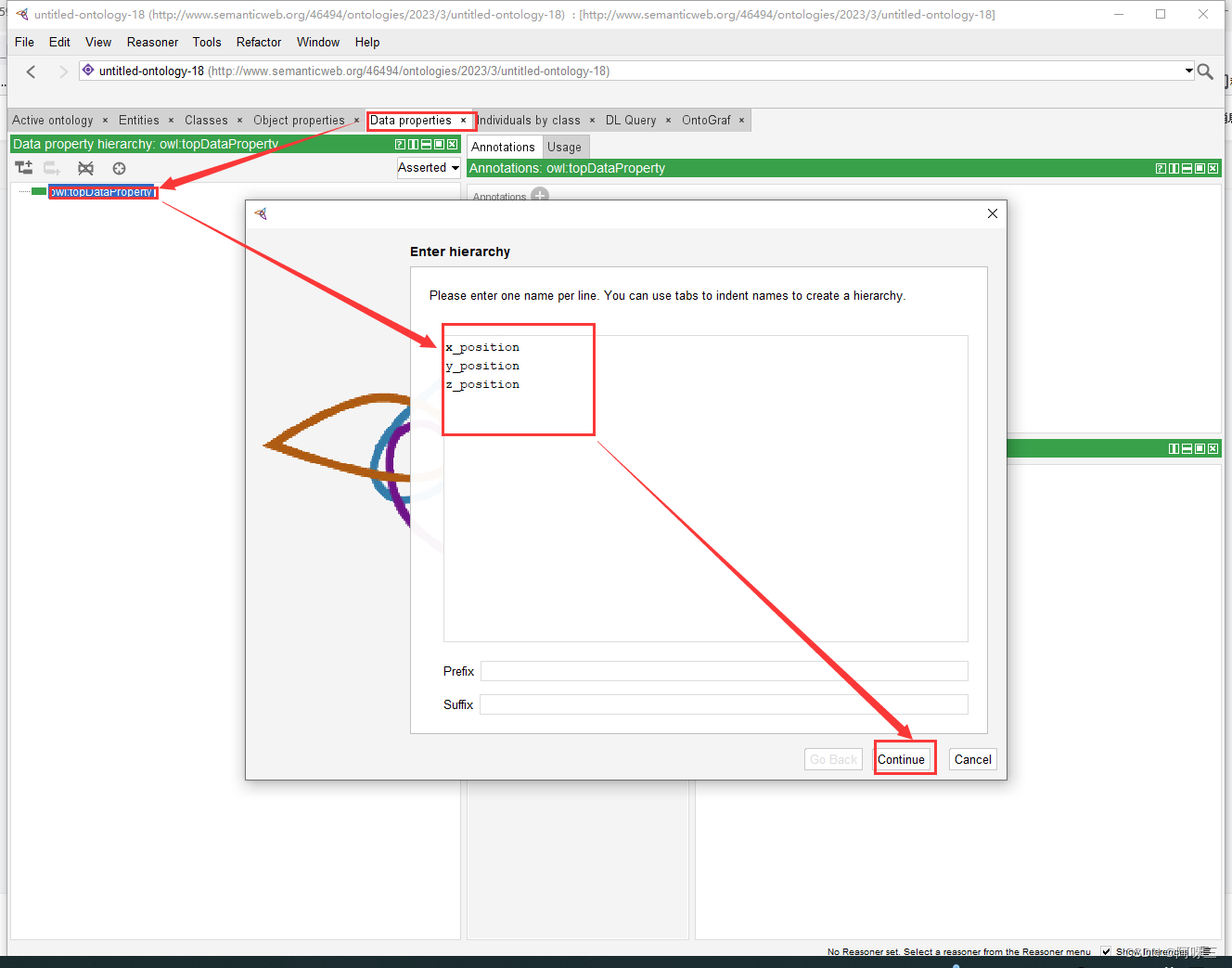
然后点击Data properties,点击owl:topDataProperty右键创建数据属性,这里我们创建了x_position,y_position,z_position
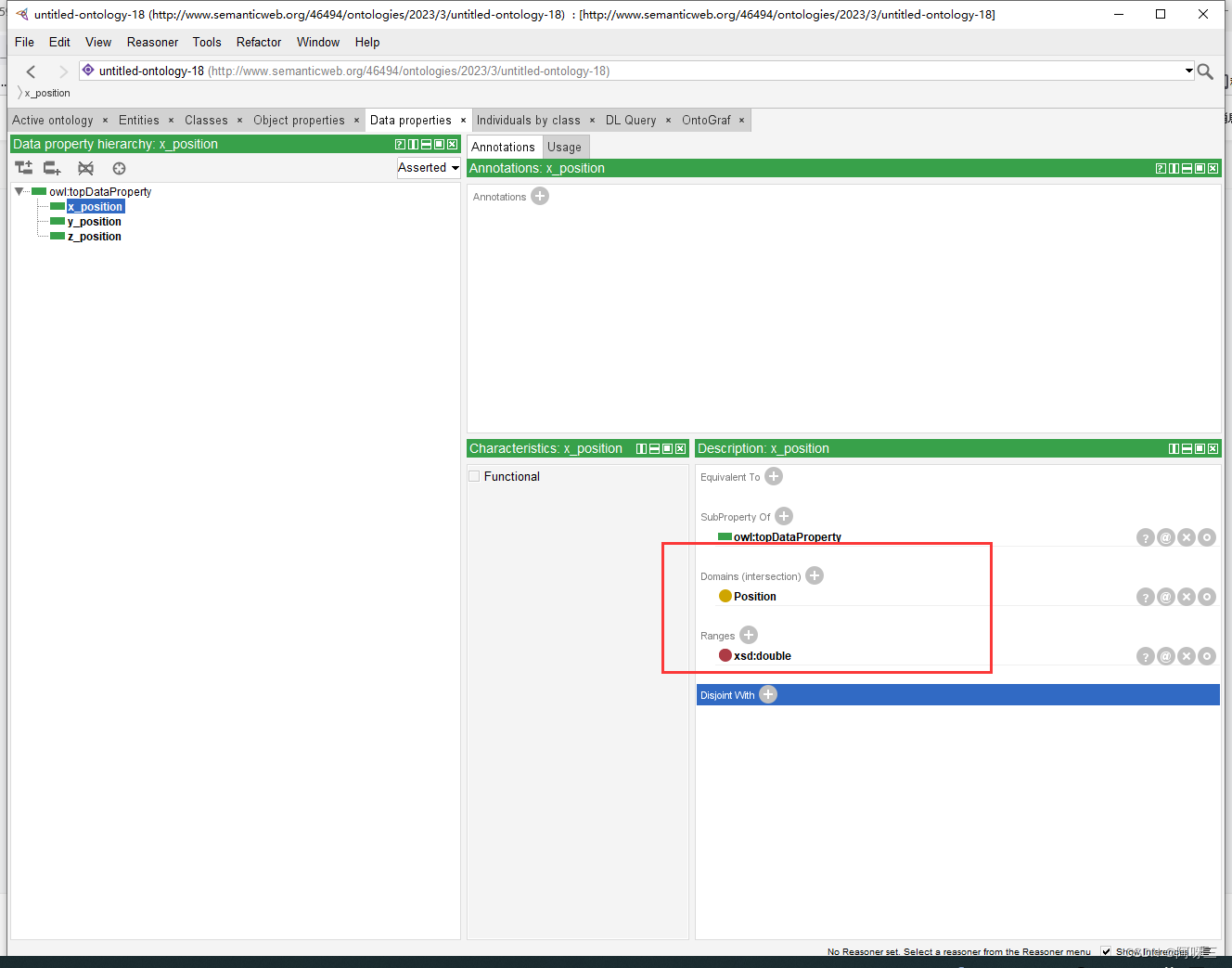
然后分别点击x_position/y_position/z_position,再单击右边Domain旁边的加号,之后点击下方Ranges选择数据属性,这里要选择Position,position存储坐标信息,xyz都这样完成
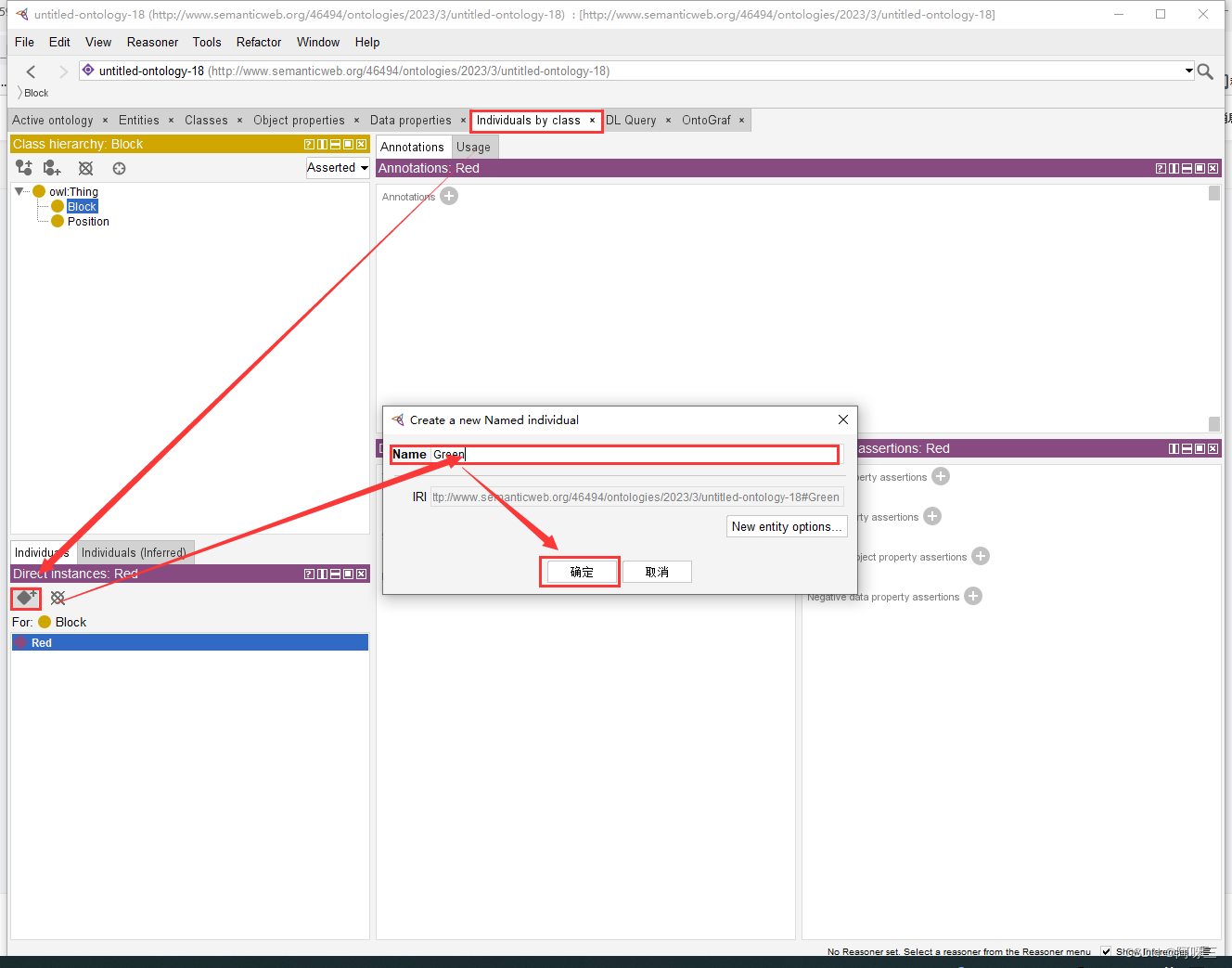
下一步点击lndividuals by class,在这里我们添加实例Red,Green,Purpel三个颜色的方块,和Red_position,Green_position,Purple_position三个位置的实例
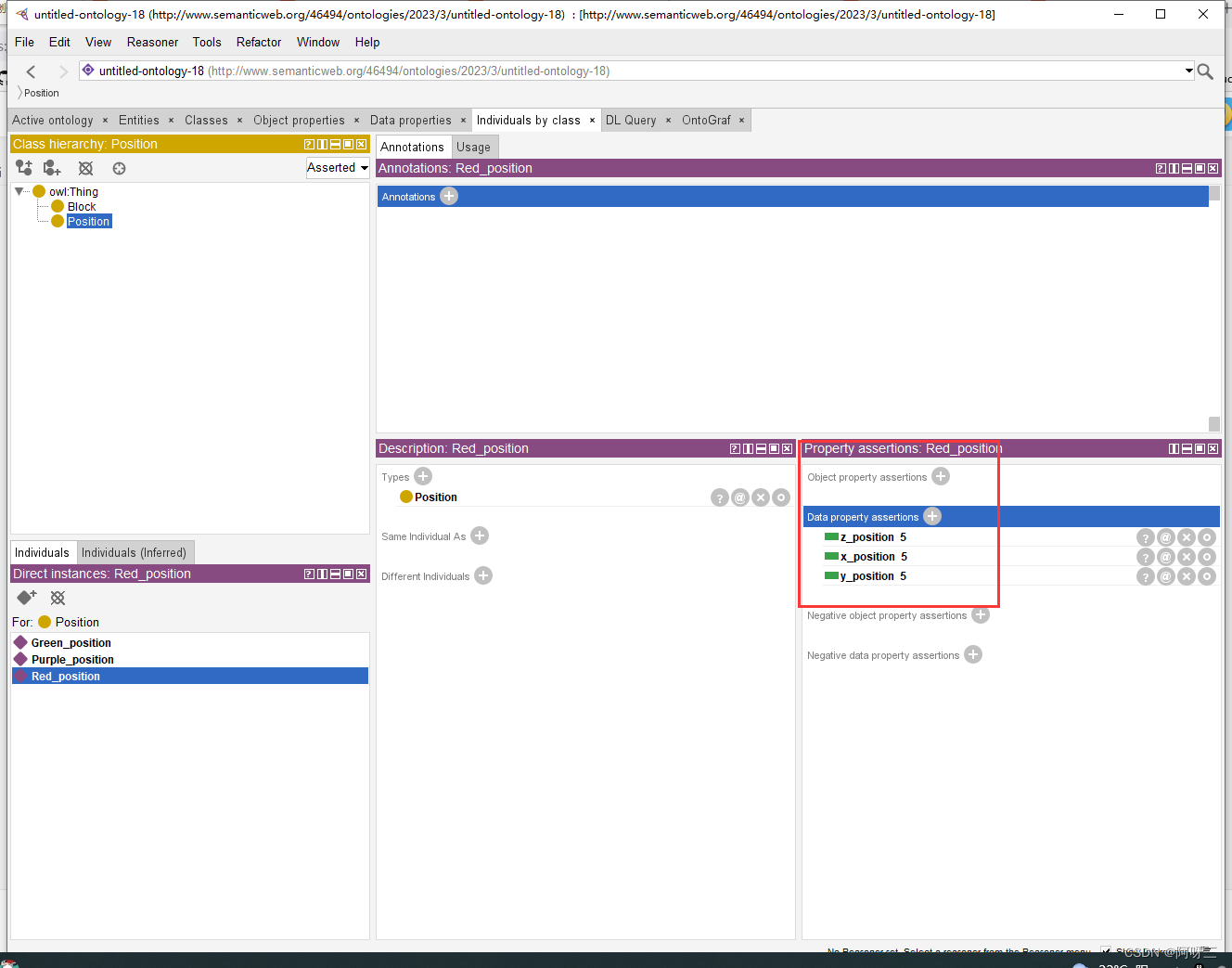
接下来按顺序点击,为实例Position添加数据属性
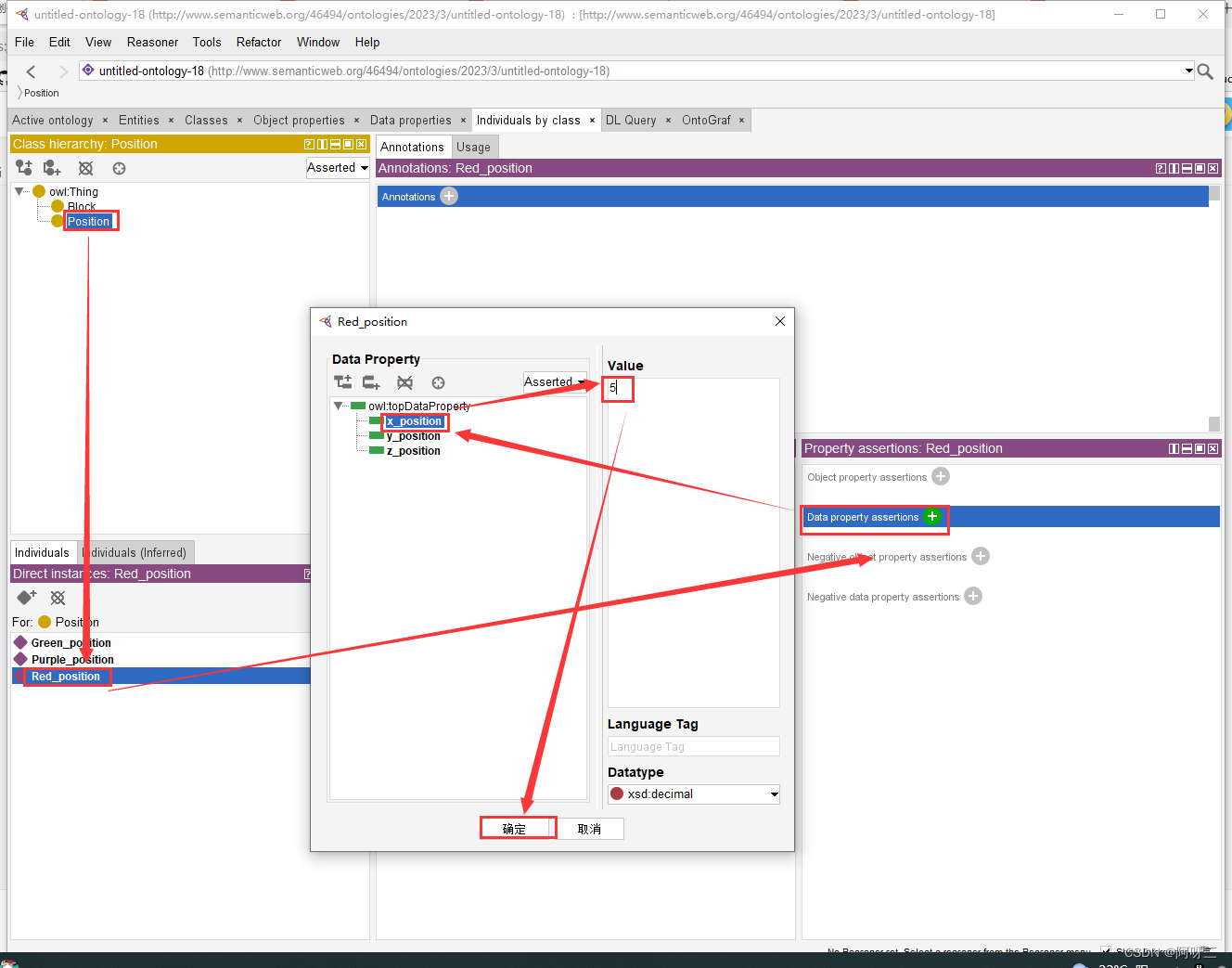
xyz都是同样的操作,不能同时添加xyz,需要分开一个一个的添加,给Red、Green、Purple_position依次添加坐标数据
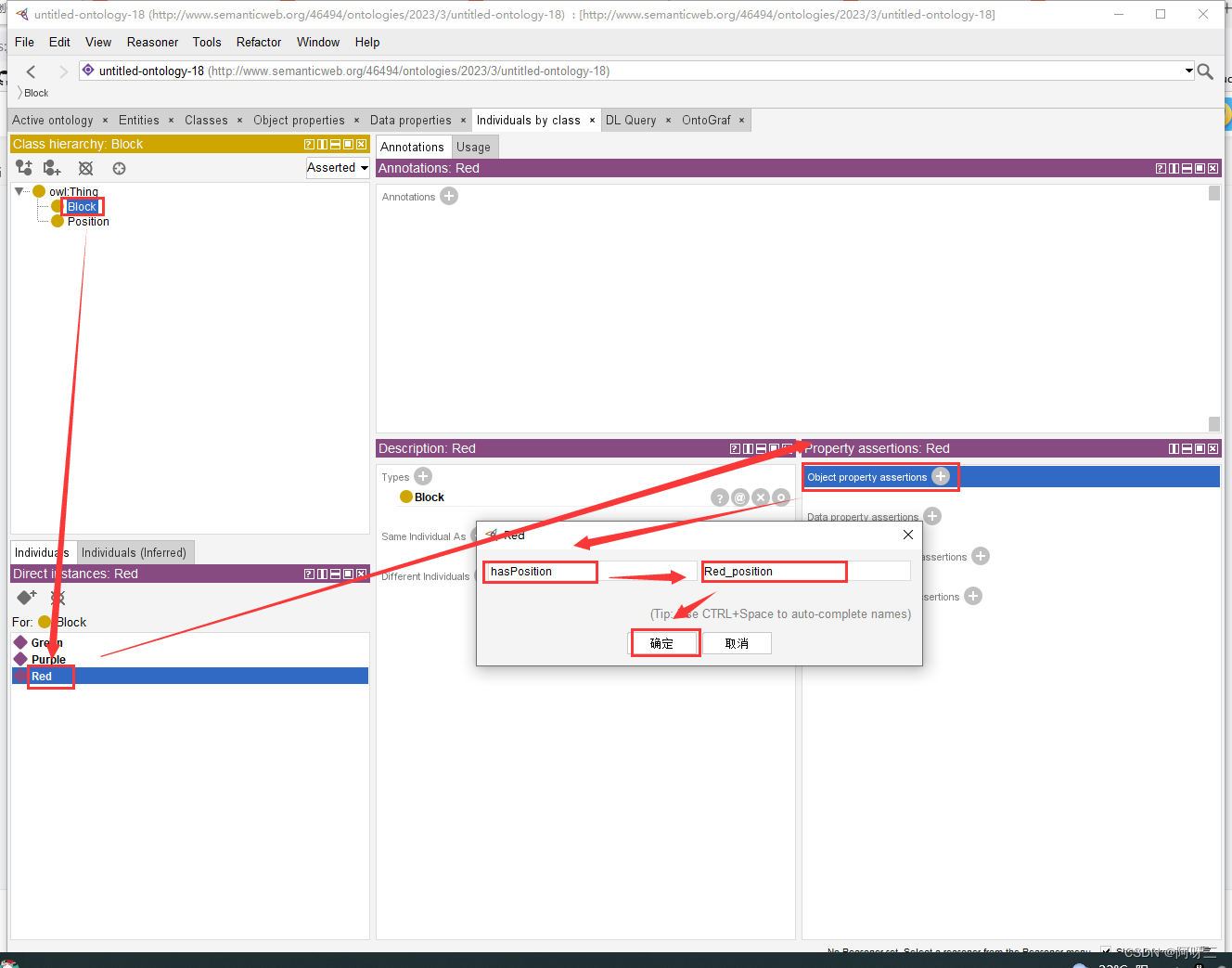
在点击Block实例,给Block实例添加属性关系,第一个方块写入属性关系hasPosition,第二个方框添加坐标实例,Red,Green,Purple三个的操作相同
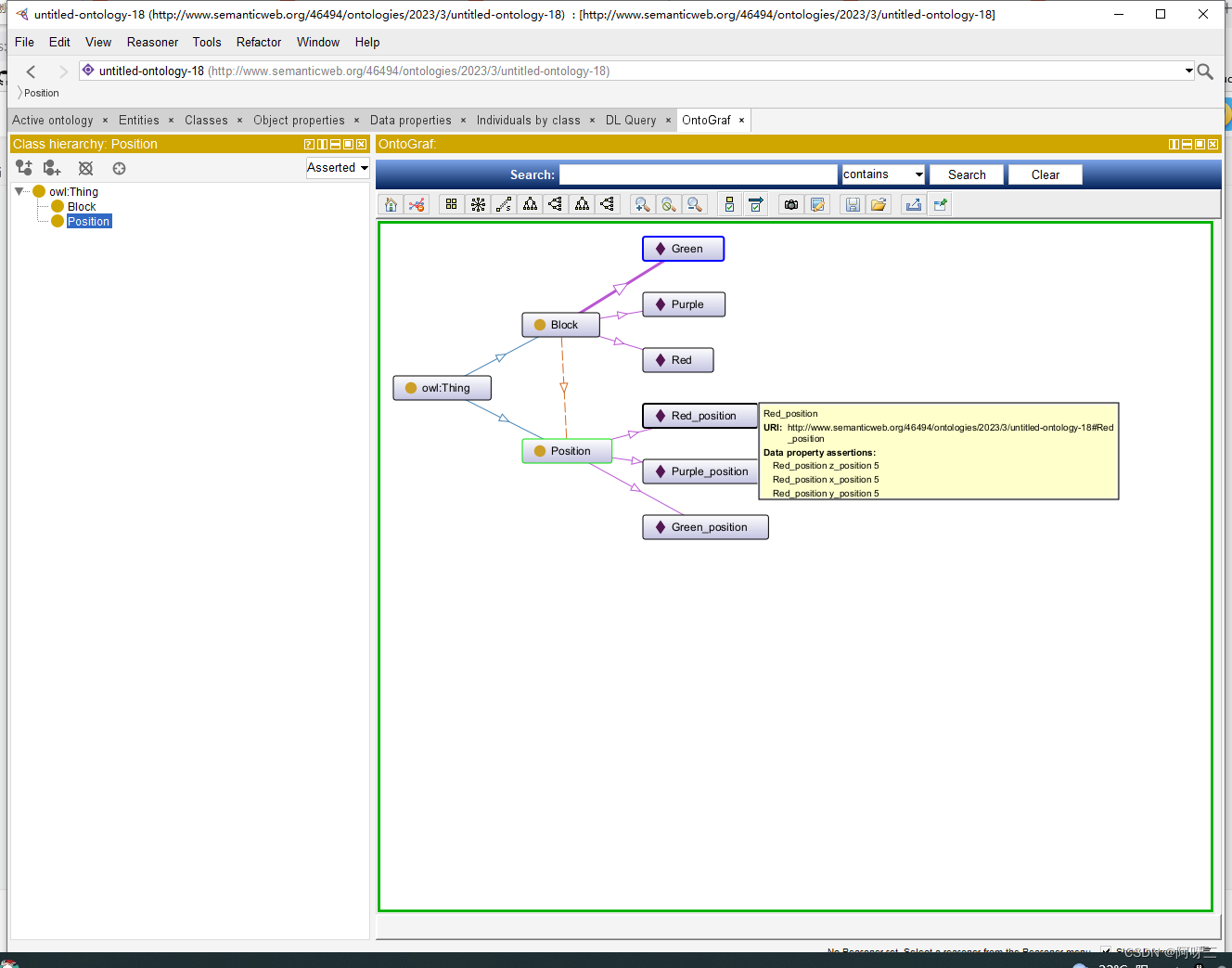
最后点击ontoGraf,就可以看到关系图了,鼠标指向Red_position就可以看到坐标数据了。
这个教程使用的比较简单,只创建了一个关系,复杂的关系添加复杂的关系属性就可以了
下面是我完成小项目的知识图谱

最后这个项目实现了xyz坐标的读取和写入,见这篇博客


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









