




 本文详细介绍了井眼定位的技术,包括磁北方向、磁偏角校正、UTM分区及其收敛角计算,以及井眼轨迹设计和监测中使用的坐标系。探讨了真北、磁北与网格北的区别,并解释了为何选择网格北作为标准指北基准。
本文详细介绍了井眼定位的技术,包括磁北方向、磁偏角校正、UTM分区及其收敛角计算,以及井眼轨迹设计和监测中使用的坐标系。探讨了真北、磁北与网格北的区别,并解释了为何选择网格北作为标准指北基准。
一、磁北方向
1、磁北是以大地磁场为基准的。
2、仪器所测量和传送的方位都是以磁北为基准的。
3、磁北的具体位置随着时间而改变。
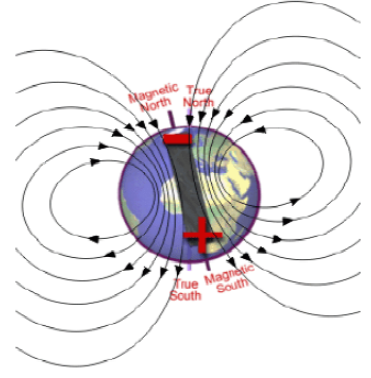
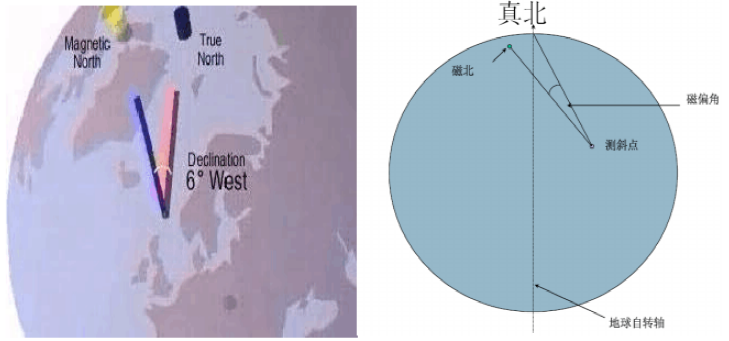
二、磁偏角
1、 由于磁北不是固定不变的,因此我们必须把井眼的方位校正到一固定位置。
2、 方位一般校正到以真北为基准。
3、真北是地球自转的地理北极。
4、我们称磁北到真北之间的夹角为“磁偏角”
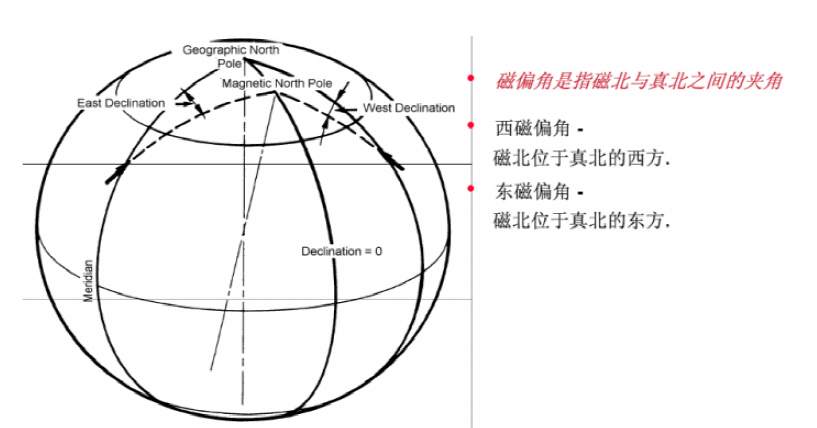
三、磁偏角校正
1、 磁偏角可以把以磁北为基础的测量数据转换成以真北为基准。
2、当磁北位于真北的西方时进行“西”校正。
3、 当磁北位于真北的东方时进行“ 东”校正。
四、UTM Zones(Universal Transverse Mercater)
1、 UTM Grid Zones 为6°经度宽。
2、每一个区都有一中央子午线,在该处:网格北= 真北。
3、分区从180 °经度开始,逆时针转动,区号从1—60。
4、收敛角不会大于3度。
五、网格北--- 以北半球为例北半球
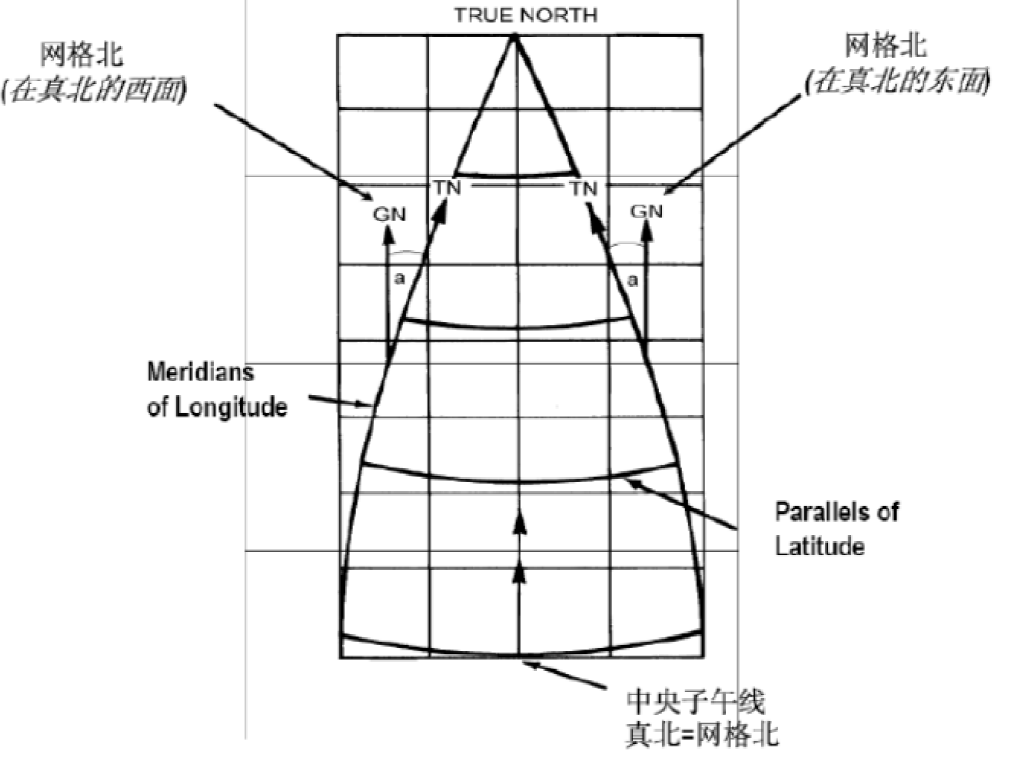
六、网格北校正
收敛角是真北到网格北的角度
当网格北在真北的西面,称为西收敛角
当网格北在真北的东面,称为东收敛角
现在的惯例是避免使用+或-,而使用“东”、“西”校正
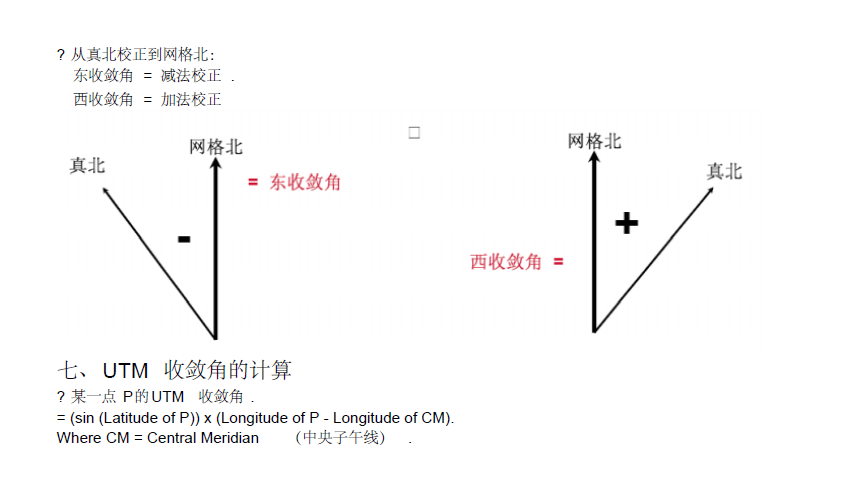
七、UTM收敛角的计算
某一点P的UTM收敛角
=(sin(LatP))*(LonP-LonCM)(CM为中央经线)
总结:
1)测量仪器测的是磁北,磁北转成真北
2)卫星测得两点,计算两点方向是相对坐标北向
3)中央经线的点的坐标北向就是真北方向
4)中央经线以外的点的真北方向可以通过计算得到,同一个子午线的点的真北方向相同。
真北与网格北
目前工程项目用到的方向均为坐标北方向,而太阳能最大发电量应为组件为真北方向。如何测定真北方向,经查阅书籍发现测定真北方向的方法均为大家不熟悉的天文测量法或陀螺经纬仪测量法,因此想确定真北方向,在日常绘图及施工中还需确定子午线收敛角的大小。子午线收敛角γ是地球椭球体面上一点的真子午线与位于此点所在的投影带的中央子午线之间的夹角,即高斯平面直角坐标系的坐标北向与真北方向的夹角。相对真北方向而已,以真子午线北方向为准,当坐标纵轴线北端位于以东时称东偏,其角值为正;位于以西时称西偏,其角值为负。
井眼定位方法
井眼轨迹设计、监测与控制是定向钻井的核心技术。在设计井眼轨迹时,首先应确定井口和靶点的位置,然后求得靶点相对于井口的垂深、水平位移等参数。在井眼轨迹监测和控制过程中,也需要随时确定井眼轨迹的空间坐标,以保证钻达预期目标。这些都属于井眼定位问题。
为满足井眼轨迹设计、监测与控制的需要,钻井工程师常以井口为原点,以正北、正东及垂直方向为坐标轴,建立一个三维笛卡尔坐标系,称为井口坐标系。目前,国内外都采用水平面定位和垂向定位相结合的方法进行井眼定位。在井口坐标系下,靶点北坐标和东坐标分别为靶点与井口之间的地图投影纵坐标之差和横坐标之差,而靶点垂深为井口与靶点的高程之差。
井口坐标系是设计和监测井眼轨迹的基础,其首要任务是确定指北基准。定向钻井涉及3个指北方向,即真指北基准及方位角指北基准及方位角北、地图投影坐标北和磁北。真北指向地理北极方向,地图投影坐标北指向高斯投影、UTM(通用横轴墨卡托)投影等地图投影平面上的纵坐标轴正向(也简称网格北),而磁北指向地磁北极方向。在井口坐标系中,垂深坐标轴沿重力线方向指向地心,所以选定指北基准后就确定了北坐标轴和东坐标轴的方向。此外,指北基准还是方位角的起算基准,对应于3个指北基准的方位角分别称之为真方位角、坐标方位角(也称网格方位角)和磁方位角。三者之间的关系如图所示。
由于磁北极随时间变化,所以磁北不宜作为指北基准,否则会给井眼防碰、老井侧钻及油田开发等工作带来不便。理论上,真北和坐标北(网格北)都可作为指北基准。由于根据地图投影坐标容易确定井口坐标系下的靶点北坐标和东坐标,据此可直接设计井眼轨道,所以目前习惯采用网格北作为指北基准。


















 777
777

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











