






 在使用Proteus8Professional编译C51程序时遇到了ERRORL121错误,该错误涉及到模块MAIN.OBJ的绝对段OFFSET:0023H。问题的解决方案是将ROM设置为LARGE模式,这个更改使得编译得以成功。
在使用Proteus8Professional编译C51程序时遇到了ERRORL121错误,该错误涉及到模块MAIN.OBJ的绝对段OFFSET:0023H。问题的解决方案是将ROM设置为LARGE模式,这个更改使得编译得以成功。
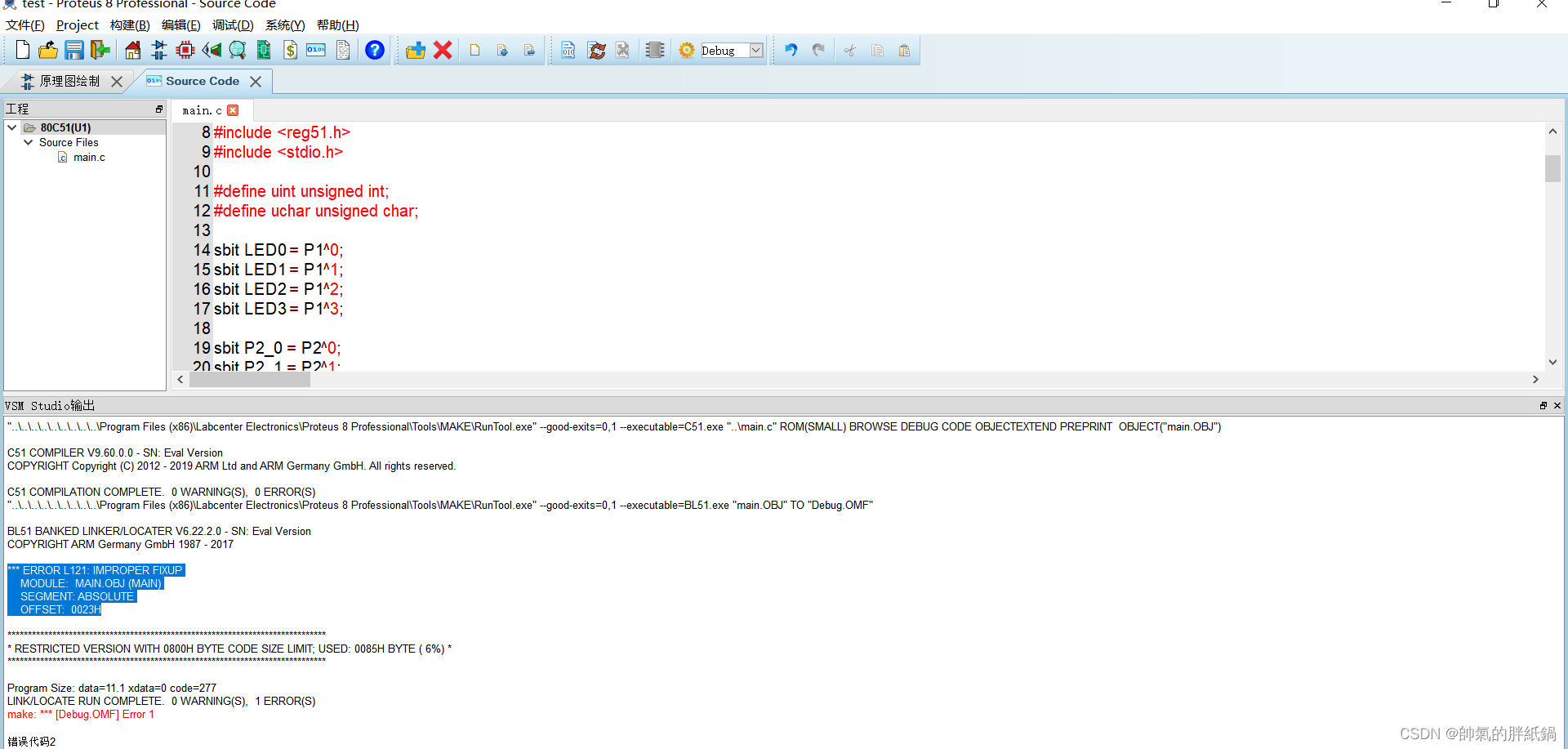
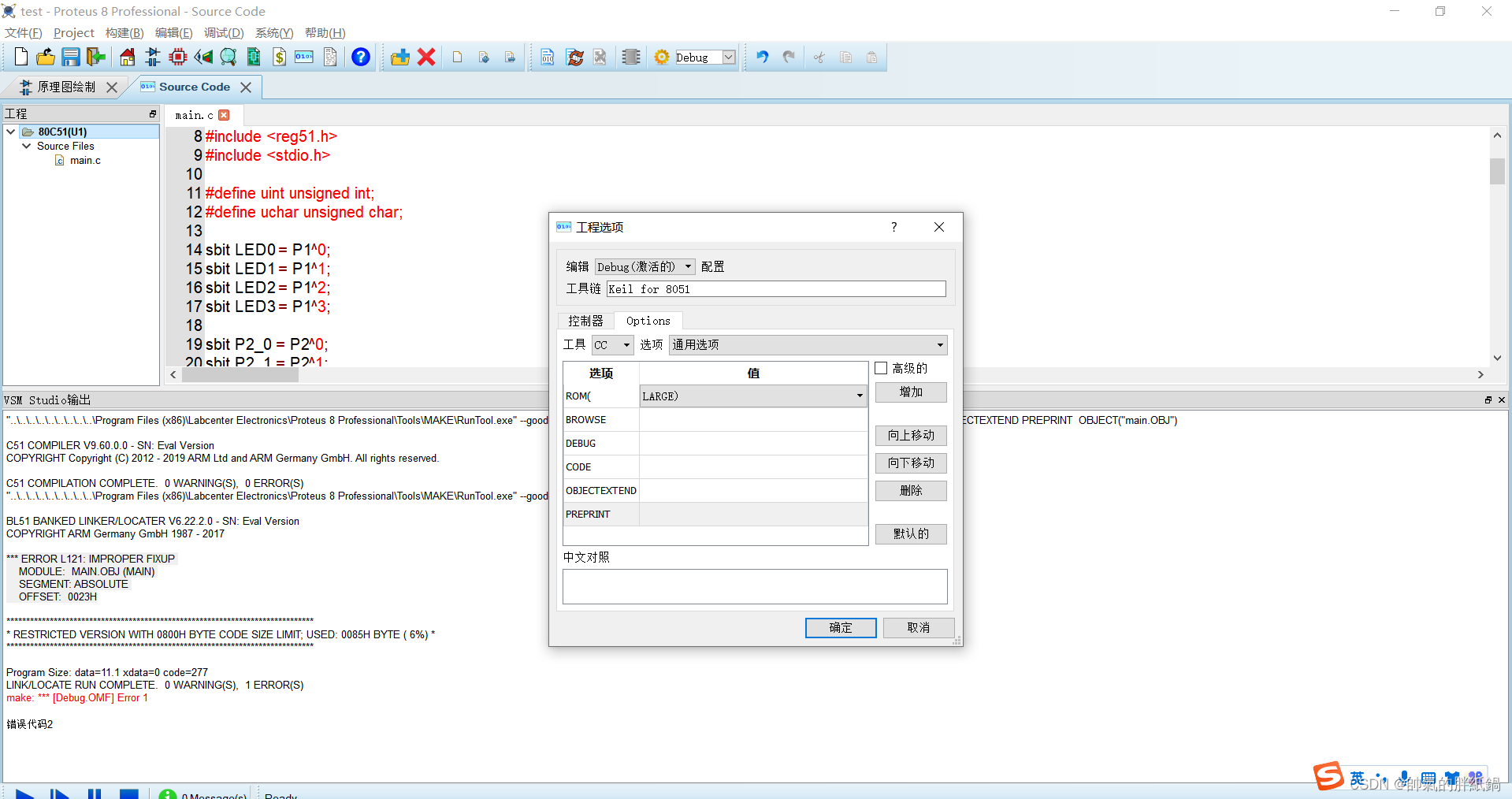
在Proteus 8 Professional 编译C51程序报如下错误信息:
*** ERROR L121: IMPROPER FIXUP
MODULE: MAIN.OBJ (MAIN)
SEGMENT: ABSOLUTE
OFFSET: 0023H
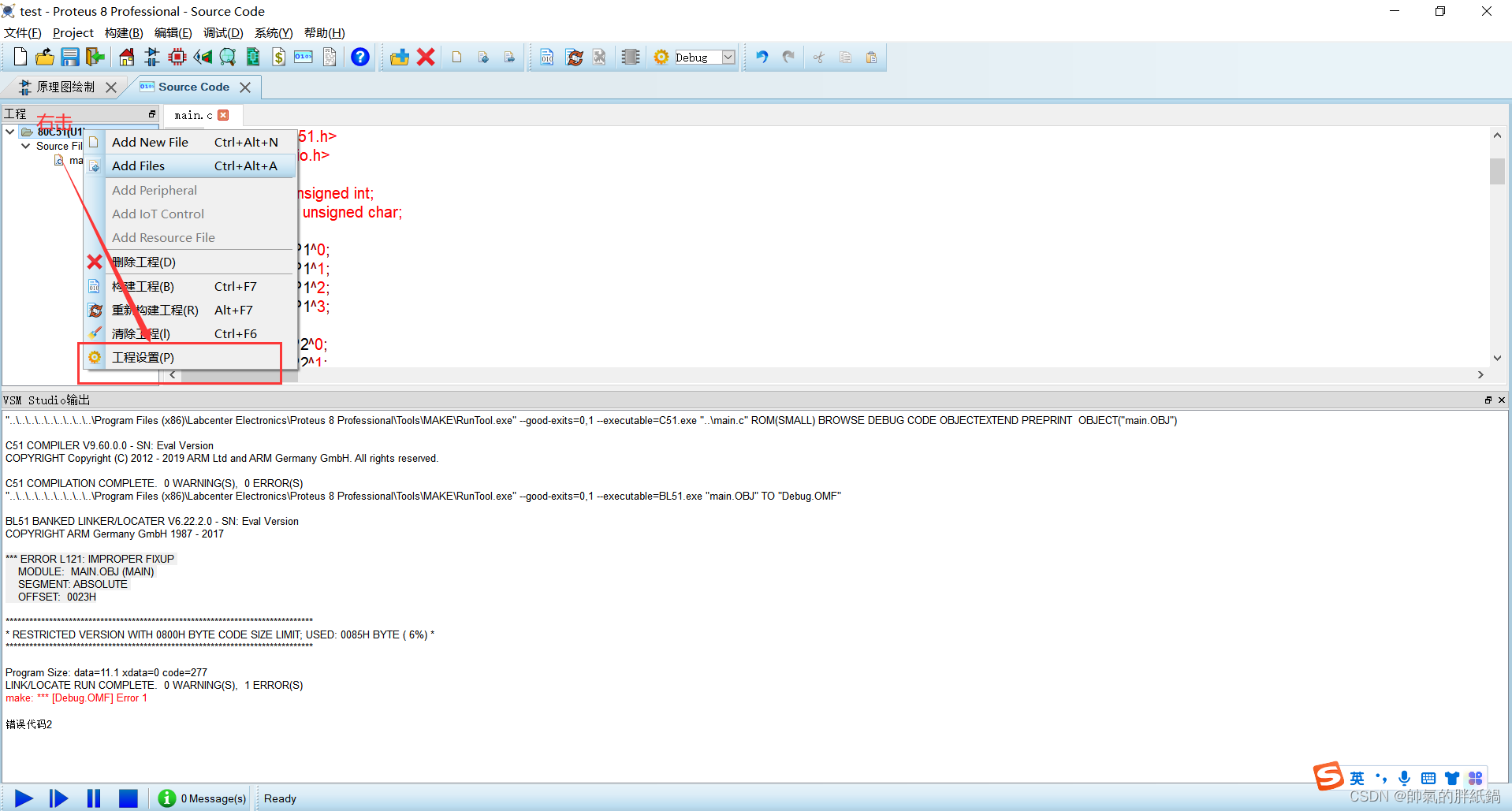
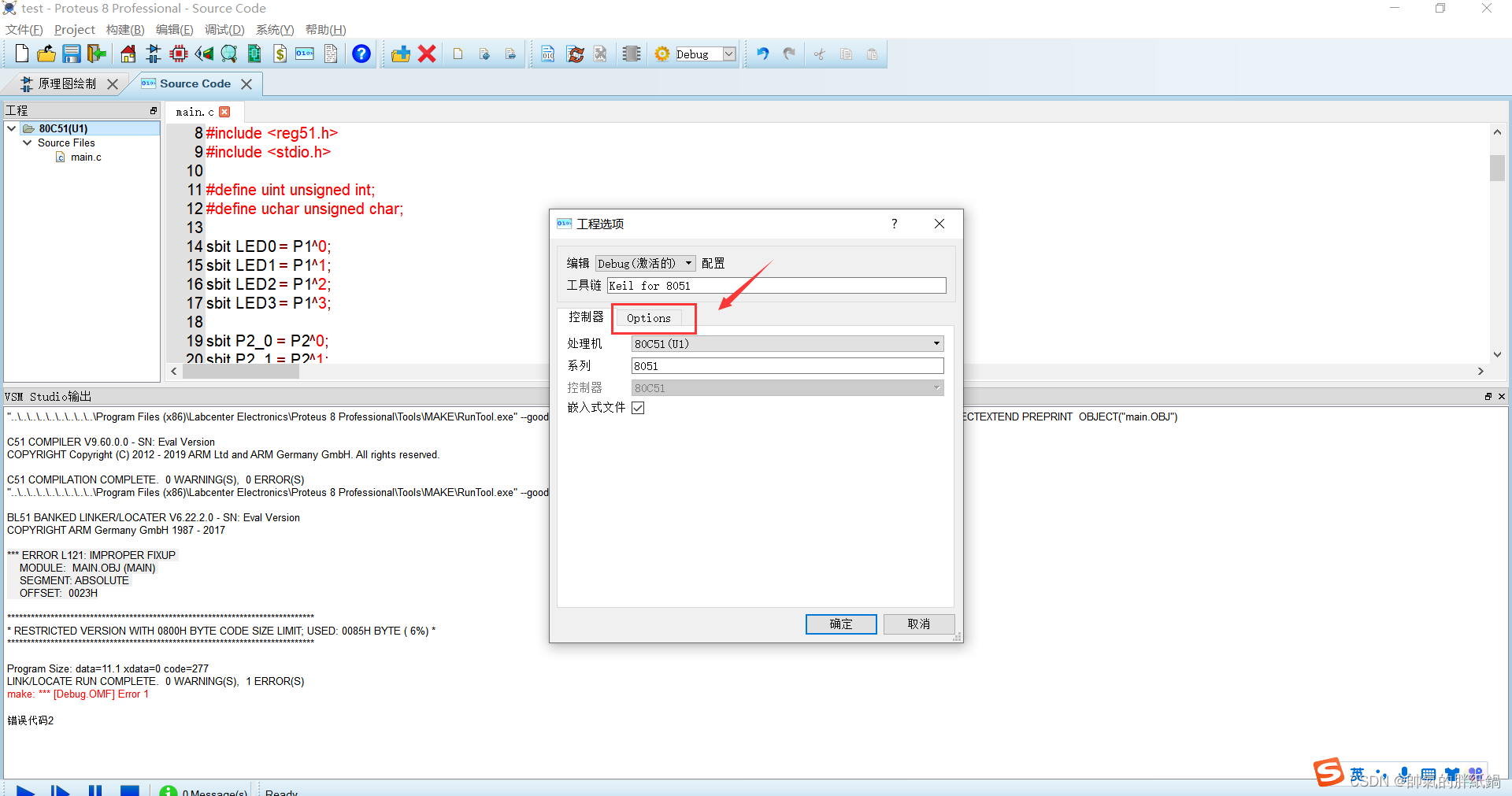
【解决的方案】
将ROM改为LARGE
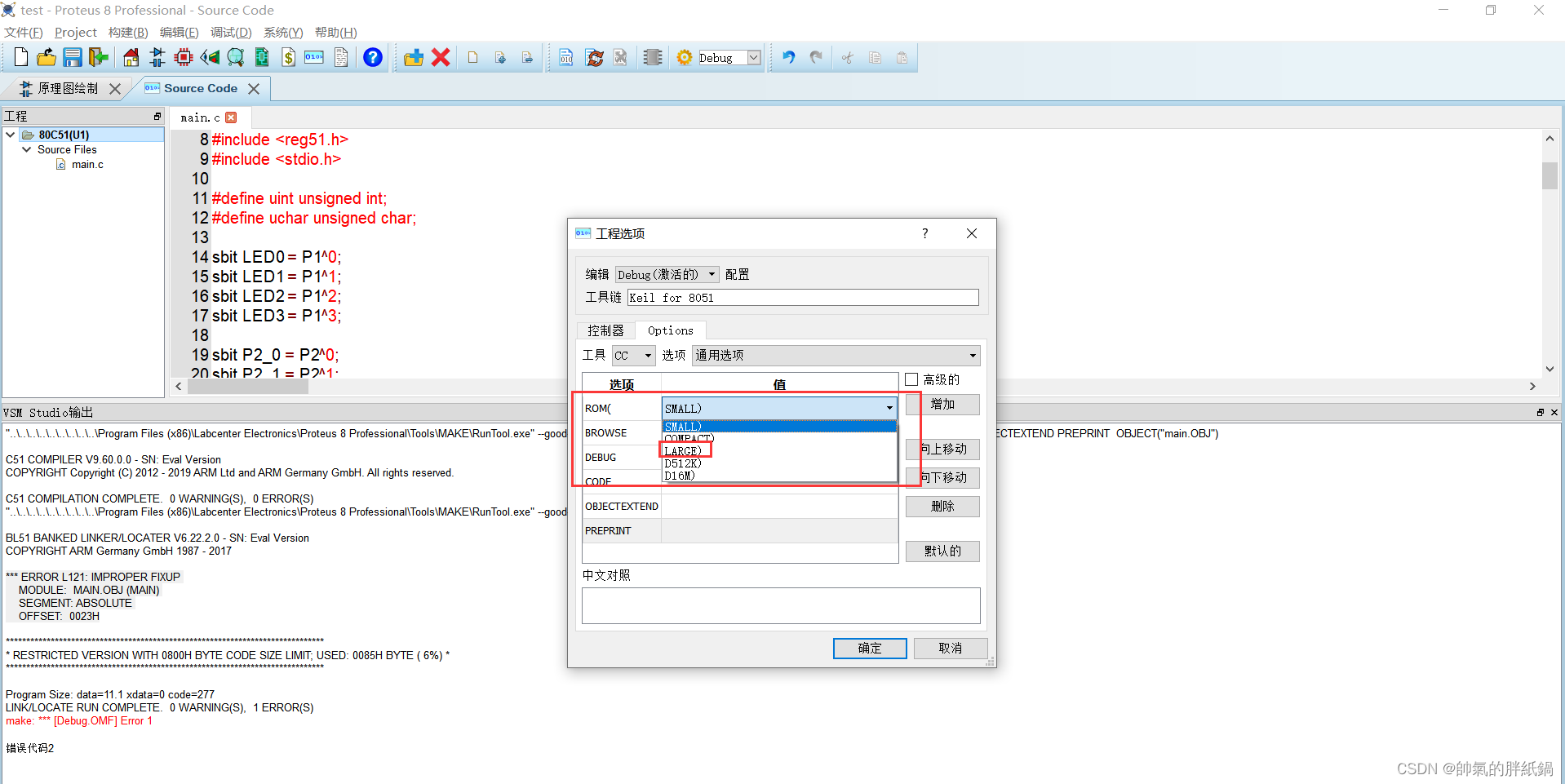
【修改完成后编译成功!!!】

在Proteus 8 Professional 编译C51程序报如下错误信息:
*** ERROR L121: IMPROPER FIXUP
MODULE: MAIN.OBJ (MAIN)
SEGMENT: ABSOLUTE
OFFSET: 0023H
【解决的方案】
将ROM改为LARGE
【修改完成后编译成功!!!】
 7104
7104

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























