







转载自http://blog.csdn.net/jasonchen_gbd/article/details/46055885
上一篇文章介绍了ubus的组件和实现原理,本文通过代码实例介绍使用ubus进行进程间通信的三种方式。
1. invoke的方式实现端对端通信
最简单的情景就是一个提供服务的server端,一个请求服务的client端,client请求server的服务。
下面的例子中,server注册了一个名为“scan_prog”的对象,该对象中提供一个“scan”方法:
ubus_invoke.h:
- #ifndef __UBUS_INVOKE_H__
- #define __UBUS_INVOKE_H__
- #include <json/json.h>
- #include <libubox/blobmsg_json.h>
- struct prog_attr {
- <span style="white-space:pre"> </span>char name[64];
- <span style="white-space:pre"> </span>int chn_id;
- };
- #define PROG_MAX<span style="white-space:pre"> </span>8
- #endif /* __UBUS_INVOKE_H__ */
invoke_server.c:
- #include <libubox/uloop.h>
- #include <libubox/ustream.h>
- #include <libubox/utils.h>
- #include <libubus.h>
- #include <json/json.h>
- #include <libubox/blobmsg_json.h>
- #include "ubus_invoke.h"
- static struct ubus_context * ctx = NULL;
- static struct blob_buf b;
- static const char * sock_path;
- static struct prog_attr uri_list[PROG_MAX] =
- {
- {"program_beijing", 1},
- {"program_guangzhou", 2},
- {"program_shanghai", 3},
- {"", -1},
- };
- enum
- {
- SCAN_CHNID,
- SCAN_POLICY_MAX,
- };
- static const struct blobmsg_policy scan_policy[SCAN_POLICY_MAX] = {
- [SCAN_CHNID] = {.name = "chnID", .type = BLOBMSG_TYPE_INT32},
- };
- static int ubus_start_scan(struct ubus_context *ctx, struct ubus_object *obj,
- struct ubus_request_data *req, const char *method,
- struct blob_attr *msg)
- {
- int ret = -1;
- void * json_list = NULL;
- void * json_uri = NULL;
- int idx;
- blob_buf_init(&b, 0);
- struct blob_attr *tb[SCAN_POLICY_MAX];
- blobmsg_parse(scan_policy, SCAN_POLICY_MAX, tb, blob_data(msg), blob_len(msg));
- /*
- 本例子中,如果请求特定的节目号,返回节目名称。
- 如果请求节目号是0,则返回所有节目列表。
- */
- if (tb[SCAN_CHNID] != NULL)
- {
- int chnid = blobmsg_get_u32(tb[SCAN_CHNID]);
- if (chnid == 0)
- {
- json_uri = blobmsg_open_array(&b, "prog_list");
- for (idx = 0; idx < PROG_MAX; idx++)
- {
- if ('\0' != uri_list[idx].name[0])
- {
- json_list = blobmsg_open_table(&b, NULL);
- blobmsg_add_string(&b, "name", uri_list[idx].name);
- blobmsg_add_u32(&b, "channel", uri_list[idx].chn_id);
- blobmsg_close_table(&b, json_list);
- }
- }
- blobmsg_close_array(&b, json_uri);
- ret = 0;
- }
- else
- {
- for (idx = 0; idx < PROG_MAX; idx++)
- {
- if ('\0' != uri_list[idx].name[0] && uri_list[idx].chn_id == chnid)
- {
- blobmsg_add_string(&b, "name", uri_list[idx].name);
- ret = 0;
- }
- }
- }
- }
- blobmsg_add_u32(&b, "result", ret);
- ubus_send_reply(ctx, req, b.head);
- return 0;
- }
- /* 方法列表 */
- static struct ubus_method scan_methods[] =
- {
- UBUS_METHOD("scan", ubus_start_scan, scan_policy),
- };
- /* type目前没有实际用处 */
- static struct ubus_object_type scan_obj_type
- = UBUS_OBJECT_TYPE("scan_prog", scan_methods);
- static struct ubus_object scan_obj =
- {
- .name = "scan_prog", /* 对象的名字 */
- .type = &scan_obj_type,
- .methods = scan_methods,
- .n_methods = ARRAY_SIZE(scan_methods),
- };
- static void ubus_add_fd(void)
- {
- ubus_add_uloop(ctx);
- #ifdef FD_CLOEXEC
- fcntl(ctx->sock.fd, F_SETFD,
- fcntl(ctx->sock.fd, F_GETFD) | FD_CLOEXEC);
- #endif
- }
- static void ubus_reconn_timer(struct uloop_timeout *timeout)
- {
- static struct uloop_timeout retry =
- {
- .cb = ubus_reconn_timer,
- };
- int t = 2;
- if (ubus_reconnect(ctx, sock_path) != 0) {
- uloop_timeout_set(&retry, t * 1000);
- return;
- }
- ubus_add_fd();
- }
- static void ubus_connection_lost(struct ubus_context *ctx)
- {
- ubus_reconn_timer(NULL);
- }
- static int display_ubus_init(const char *path)
- {
- uloop_init();
- sock_path = path;
- ctx = ubus_connect(path);
- if (!ctx)
- {
- printf("ubus connect failed\n");
- return -1;
- }
- printf("connected as %08x\n", ctx->local_id);
- ctx->connection_lost = ubus_connection_lost;
- ubus_add_fd();
- /* 向ubusd注册对象和方法,供其他ubus客户端调用。 */
- if (ubus_add_object(ctx, &scan_obj) != 0)
- {
- printf("ubus add obj failed\n");
- return -1;
- }
- return 0;
- }
- static void display_ubus_done(void)
- {
- if (ctx)
- ubus_free(ctx);
- }
- int main(int argc, char * argv[])
- {
- char * path = NULL;
- if (-1 == display_ubus_init(path))
- {
- printf("ubus connect failed!\n");
- return -1;
- }
- uloop_run();
- display_ubus_done();
- return 0;
- }
- #include <libubox/uloop.h>
- #include <libubox/ustream.h>
- #include <libubox/utils.h>
- #include <libubus.h>
- #include <json/json.h>
- #include <libubox/blobmsg_json.h>
- #include "ubus_invoke.h"
- static struct ubus_context * ctx = NULL;
- static struct blob_buf b;
- static const char * cli_path;
- enum
- {
- SCAN_CHNID,
- SCAN_POLICY_MAX,
- };
- static const struct blobmsg_policy scan_policy[SCAN_POLICY_MAX] = {
- [SCAN_CHNID] = {.name = "chnID", .type = BLOBMSG_TYPE_INT32},
- };
- static int timeout = 30;
- static bool simple_output = false;
- static void scanreq_prog_cb(struct ubus_request *req, int type, struct blob_attr *msg)
- {
- char *str;
- if (!msg)
- return;
- /*
- 在这里处理返回的消息。
- 本例子只是将返回的消息打印出来。
- */
- str = blobmsg_format_json_indent(msg, true, simple_output ? -1 : 0);
- printf("%s\n", str);
- free(str);
- }
- static int client_ubus_call()
- {
- unsigned int id;
- int ret;
- blob_buf_init(&b, 0);
- /* 需要传递的参数 */
- blobmsg_add_u32(&b, scan_policy[SCAN_CHNID].name, 0);
- /*
- 向ubusd查询是否存在"scan_prog"这个对象,
- 如果存在,返回其id
- */
- ret = ubus_lookup_id(ctx, "scan_prog", &id);
- if (ret != UBUS_STATUS_OK) {
- printf("lookup scan_prog failed\n");
- return ret;
- }
- else {
- printf("lookup scan_prog successs\n");
- }
- /* 调用"scan_prog"对象的"scan"方法 */
- return ubus_invoke(ctx, id, "scan", b.head, scanreq_prog_cb, NULL, timeout * 1000);
- }
- /*
- ubus_invoke()的声明如下:
- int ubus_invoke(struct ubus_context *ctx, uint32_t obj, const char *method,
- struct blob_attr *msg, ubus_data_handler_t cb, void *priv, int timeout);
- 其中cb参数是消息回调函数,其函数类型定义为:
- typedef void (*ubus_data_handler_t)(struct ubus_request *req,
- int type, struct blob_attr *msg);
- 参数type是请求消息的类型,如UBUS_MSG_INVOKE,UBUS_MSG_DATA等。
- 参数msg存放从服务端得到的回复消息,struct blob_attr类型,同样用blobmsg_parse()来解析。
- 参数req保存了请求方的消息属性,其中req->priv即ubus_invoke()中的priv参数,
- 用这个参数可以零活的传递一些额外的数据。
- */
- static int client_ubus_init(const char *path)
- {
- uloop_init();
- cli_path = path;
- ctx = ubus_connect(path);
- if (!ctx)
- {
- printf("ubus connect failed\n");
- return -1;
- }
- printf("connected as %08x\n", ctx->local_id);
- return 0;
- }
- static void client_ubus_done(void)
- {
- if (ctx)
- ubus_free(ctx);
- }
- int main(int argc, char * argv[])
- {
- /* ubusd创建的unix socket,默认值为"/var/run/ubus.sock" */
- char * path = NULL;
- /* 连接ubusd */
- if (UBUS_STATUS_OK != client_ubus_init(path))
- {
- printf("ubus connect failed!\n");
- return -1;
- }
- /* 调用某个ubus方法并处理返回结果 */
- client_ubus_call();
- client_ubus_done();
- return 0;
- }
也可以通过shell命令来请求server的服务,例如:
ubus call scan_prog scan '{"chnID": 0}'
这条命令和执行client程序的作用相同。
这条命令和执行client程序的作用相同。
2. subscribe/notify的方式实现订阅
ubus支持以订阅的方式进行进程间通信,通信方式如下图:
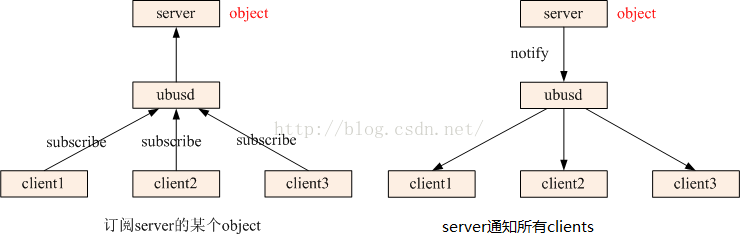
被订阅者(server)又称为notifier,订阅者(client)又称为subscriber。这样一来,可以同时有多个client订阅server的某个服务,当server通过该服务广播消息时,所有client都会被通知,并执行各自的处理。
主要过程为:
server进程:
- 连接ubusd。
- 注册一个object,用于client订阅。
- server可以向订阅者广播消息。
- 等待消息。
client进程:
- 连接ubusd。
- 向server订阅object,并定义收到server的消息时的处理函数。
- 等待消息。
代码示例:下面这个例子中,server注册了一个名为“test”的对象,并定期广播消息。而client去订阅这个对象,并对server发出的消息做处理。
notify_server.c:
- #include <unistd.h>
- #include <libubox/blobmsg_json.h>
- #include <libubox/uloop.h>
- #include <libubus.h>
- static struct ubus_context *ctx;
- static void test_client_subscribe_cb(struct ubus_context *ctx, struct ubus_object *obj)
- {
- fprintf(stderr, "Subscribers active: %d\n", obj->has_subscribers);
- }
- /* 这个空的method列表,只是为了让object有个名字,这样client可以通过object name来订阅。 */
- static struct ubus_method test_methods[] = {};
- static struct ubus_object_type test_obj_type =
- UBUS_OBJECT_TYPE("test", test_methods);
- static struct ubus_object test_object = {
- .name = "test", /* object的名字 */
- .type = &test_obj_type,
- .subscribe_cb = test_client_subscribe_cb,
- };
- static void notifier_main(void)
- {
- int ret;
- /* 注册一个object,client可以订阅这个object */
- ret = ubus_add_object(ctx, &test_object);
- if (ret) {
- fprintf(stderr, "Failed to add object: %s\n", ubus_strerror(ret));
- return;
- }
- /* 在需要的时候,向所有客户端发送notify消息 */
- /* step1: 如果需要传递参数,则保存到struct blob_attr类型的结构体中。 */
- /*
- int ubus_notify(struct ubus_context *ctx, struct ubus_object *obj, const char *type, struct blob_attr *msg, int timeout);
- type是一个字符串,自定义的。msg是需要携带的参数。如果需要等待回复,timeout需设置为>=0。
- */
- while (1) {
- sleep(2);
- /* step2: 广播notification消息。 */
- ubus_notify(ctx, &test_object, "say Hi!", NULL, -1);
- }
- }
- int main(int argc, char **argv)
- {
- const char *ubus_socket = NULL;
- uloop_init();
- ctx = ubus_connect(ubus_socket);
- if (!ctx) {
- fprintf(stderr, "Failed to connect to ubus\n");
- return -1;
- }
- ubus_add_uloop(ctx);
- notifier_main();
- uloop_run();
- ubus_free(ctx);
- uloop_done();
- return 0;
- }
- #include <unistd.h>
- #include <libubox/blobmsg_json.h>
- #include <libubox/uloop.h>
- #include <libubus.h>
- static struct ubus_context *ctx;
- static int counter = 0;
- static uint32_t obj_id;
- static struct ubus_subscriber test_event;
- static int test_notify(struct ubus_context *ctx, struct ubus_object *obj,
- struct ubus_request_data *req,
- const char *method, struct blob_attr *msg)
- {
- printf("notify handler...\n");
- counter++;
- if (counter > 3)
- ubus_unsubscribe(ctx, &test_event, obj_id); /* 取消订阅 */
- return 0;
- }
- static void test_handle_remove(struct ubus_context *ctx,
- struct ubus_subscriber *obj, uint32_t id)
- {
- printf("remove handler...\n");
- }
- static void subscriber_main(void)
- {
- int ret;
- /* 通知到来时的处理函数。 */
- test_event.cb = test_notify;
- test_event.remove_cb = test_handle_remove; //server主动发起删除该client的订阅的cb函数(如server退出的时候)
- /* 注册test_event */
- ret = ubus_register_subscriber(ctx, &test_event);
- if (ret)
- fprintf(stderr, "Failed to add watch handler: %s\n", ubus_strerror(ret));
- /* 得到要订阅的object的id */
- ret = ubus_lookup_id(ctx, "test", &obj_id);
- if (ret)
- fprintf(stderr, "Failed to lookup object: %s\n", ubus_strerror(ret));
- /* 订阅object */
- ret = ubus_subscribe(ctx, &test_event, obj_id);
- if (ret)
- fprintf(stderr, "Failed to subscribe: %s\n", ubus_strerror(ret));
- }
- int main(int argc, char **argv)
- {
- const char *ubus_socket = NULL;
- uloop_init();
- ctx = ubus_connect(ubus_socket);
- if (!ctx) {
- fprintf(stderr, "Failed to connect to ubus\n");
- return -1;
- }
- ubus_add_uloop(ctx);
- subscriber_main();
- uloop_run();
- ubus_free(ctx);
- uloop_done();
- return 0;
- }
运行多个client程序,由于每个client都订阅了“test”对象,则所有client都会收到server发出的消息。当client取消订阅后,则不再收到server端的消息。
event的方式实现事件通知
event机制从一对一的进程之间通信来讲,和invoke机制类似。不过event机制中,发送方不需要知道谁要接收这个消息,实际上就是一个广播消息。这类似于U盘的热插拔:当插上或拔出U盘时,内核会广播一个NETLINK事件,之后内核继续做自己的事情,而不关心谁会去监听和处理这个事件。
event_client.c:
- #include <libubox/uloop.h>
- #include <libubox/ustream.h>
- #include <libubox/utils.h>
- #include <libubus.h>
- #include <json/json.h>
- #include <libubox/blobmsg_json.h>
- static struct ubus_context * ctx = NULL;
- static const char * cli_path;
- #define UBUS_EVENT_ADD_DEVICE "add_device"
- #define UBUS_EVENT_REMOVE_DEVICE "rm_device"
- static void ubus_probe_device_event(struct ubus_context *ctx, struct ubus_event_handler *ev,
- const char *type, struct blob_attr *msg)
- {
- char *str;
- if (!msg)
- return;
- /*
- 在这里实现收到事件后的动作。
- event也可以传递消息,放在msg中。
- 本例子只是将返回的消息打印出来。
- */
- str = blobmsg_format_json(msg, true);
- printf("{ \"%s\": %s }\n", type, str);
- free(str);
- }
- static int client_ubus_register_events()
- {
- static struct ubus_event_handler listener;
- int ret = 0;
- /* 注册特定event的listener。多个event可以使用同一个listener */
- memset(&listener, 0, sizeof(listener));
- listener.cb = ubus_probe_device_event;
- ret = ubus_register_event_handler(ctx, &listener, UBUS_EVENT_ADD_DEVICE);
- if (ret)
- {
- fprintf(stderr, "register event failed.\n");
- return -1;
- }
- ret = ubus_register_event_handler(ctx, &listener, UBUS_EVENT_REMOVE_DEVICE);
- if (ret)
- {
- ubus_unregister_event_handler(ctx, &listener);
- fprintf(stderr, "register event failed.\n");
- return -1;
- }
- return 0;
- }
- static void ubus_add_fd(void)
- {
- ubus_add_uloop(ctx);
- #ifdef FD_CLOEXEC
- fcntl(ctx->sock.fd, F_SETFD,
- fcntl(ctx->sock.fd, F_GETFD) | FD_CLOEXEC);
- #endif
- }
- static void ubus_reconn_timer(struct uloop_timeout *timeout)
- {
- static struct uloop_timeout retry =
- {
- .cb = ubus_reconn_timer,
- };
- int t = 2;
- if (ubus_reconnect(ctx, cli_path) != 0) {
- uloop_timeout_set(&retry, t * 1000);
- return;
- }
- ubus_add_fd();
- }
- static void ubus_connection_lost(struct ubus_context *ctx)
- {
- ubus_reconn_timer(NULL);
- }
- static int client_ubus_init(const char *path)
- {
- uloop_init();
- cli_path = path;
- ctx = ubus_connect(path);
- if (!ctx)
- {
- printf("ubus connect failed\n");
- return -1;
- }
- printf("connected as %08x\n", ctx->local_id);
- ctx->connection_lost = ubus_connection_lost;
- ubus_add_fd();
- return 0;
- }
- static void client_ubus_done(void)
- {
- if (ctx)
- ubus_free(ctx);
- }
- int main(int argc, char * argv[])
- {
- char * path = NULL;
- /* 连接ubusd */
- if (UBUS_STATUS_OK != client_ubus_init(path))
- {
- printf("ubus connect failed!\n");
- return -1;
- }
- /* 注册某个事件的处理函数 */
- client_ubus_register_events();
- uloop_run();
- client_ubus_done();
- return 0;
- }
- #include <libubox/uloop.h>
- #include <libubox/ustream.h>
- #include <libubox/utils.h>
- #include <libubus.h>
- #include <json/json.h>
- #include <libubox/blobmsg_json.h>
- static struct ubus_context * ctx = NULL;
- static struct blob_buf b;
- static const char * sock_path;
- static int server_ubus_send_event(void)
- {
- blob_buf_init(&b, 0);
- /* 需要传递的参数 */
- blobmsg_add_u32(&b, "major", 3);
- blobmsg_add_u32(&b, "minor", 56);
- blobmsg_add_string(&b, "name", "mmc01");
- /* 广播名为"add_device"的事件 */
- return ubus_send_event(ctx, "add_device", b.head);
- }
- static int display_ubus_init(const char *path)
- {
- uloop_init();
- sock_path = path;
- ctx = ubus_connect(path);
- if (!ctx)
- {
- printf("ubus connect failed\n");
- return -1;
- }
- printf("connected as %08x\n", ctx->local_id);
- return 0;
- }
- static void display_ubus_done(void)
- {
- if (ctx)
- ubus_free(ctx);
- }
- int main(int argc, char * argv[])
- {
- char * path = NULL;
- if (-1 == display_ubus_init(path))
- {
- printf("ubus connect failed!\n");
- return -1;
- }
- server_ubus_send_event();
- display_ubus_done();
- return 0;
- }
再执行server主动触发"add_device"事件,则凡是注册了这个事件的client都会收到该事件并执行各自的处理。
- root@NVR:~# ./server
- connected as fdecbdc1
- { "add_device": { "major": 3, "minor": 56, "name": "mmc01" } }
- { "add_device": { "major": 3, "minor": 56, "name": "mmc01" } }
- root@NVR:~# ubus send "rm_device" '{ "major": 3, "minor": 56, "name": "mmc01" }'
- { "rm_device": { "major": 3, "minor": 56, "name": "mmc01" } }
- { "rm_device": { "major": 3, "minor": 56, "name": "mmc01" } }
在使用ubus时,可根据实际的场景来选择用哪种方式进行进程间通信。如之前所说,ubus是为发送消息而设计的,不合适传输大量数据。















 2034
2034

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









