







转载请注明出处:http://blog.csdn.net/Righthek 谢谢!
为了能够对Socket CAN的深入理解,我们需要了解Socket的机制。
Socket的中文翻译为“插座”,在计算机世界里称为套接字。Socket最初是作为网络上不同主机之间进程的通信接口,后来应用越来越广,在同一主机上的不同进程之间通信也可以用Socket。简单来说,当网络上不同主机之间的两个进程(A、B)采用Socket进行通信时,那么它们之间需要建立一个通信端点,即创建Socket,创建Socket时就分配端口号和网络地址。当进程A向进程B发送数据时,那么进程A必须要知道进程B的网络地址及端口号。
Socket采用C/S模型进行设计的,即Client/Server,面向客户端—服务器模型。
每一个Socket都用一个半相关描述:
{协议,本地地址,本地端口}
一个完整的Socket则用一个相关描述:
{协议,本地地址,本地端口,远程地址,远程端口}
一、Socket的类型
Socket有三种类型:
1、字节流套接字(SOCK_STREAM)
字节流的套接字可以提供可靠的数据传输、面向连接的通讯流。数据按何种顺序发送,就按何种顺序接收。例如,当我们按顺序发送A-B-C,那么在数据到达接收端时,它的顺序也是A-B-C。字节流套接字采用的是TCP(Transmission Control Protocol)协议。保证了数据传输的可靠性。
2、数据报套接字(SOCK_DGRAM)
数据报套接字定义了一种无连接的服务。所谓无连接服务,简单来说,即在发送数据时,无需在收发两端建立类似TCP那样的握手连接,在发送时,将数据打包,然后加上远程IP地址,即可把该数据包发送出去。
数据通过相互独立的报文进行传输。并且是无序的、不可靠的传输。
3、原始套接字(SOCK_ROW)
原始套接字是我们需要关心的,因为我们的Socket CAN采用的即是原始套接字。该接口允许对较底层协议进行操作,如IP、ICMP等。原始套接字常用于检验新的协议实现或访问现有服务中配置的新设备。
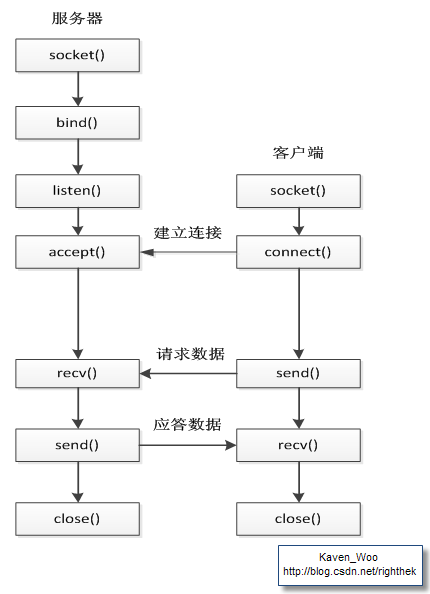
套接字的工作流程如下:
先启动服务器,通过调用socket()函数建立一个套接字,然后调用bind()函数将该套接字和本地网络地址联系在一起,再调用listen()函数使套接字做好侦听的准备,并规定它的请求队列的长度,之后就调用accept()函数来接收连接。客户端在建立套接字之后就可调用 connect()和服务器建立连接。连接一旦建立,客户端和服务器之间就可以通过调用recv()/recvfrom()函数和send()/sendto函数来进行发收数据。最后,待数据传送结束后,双方调用close()函数关闭套接字。
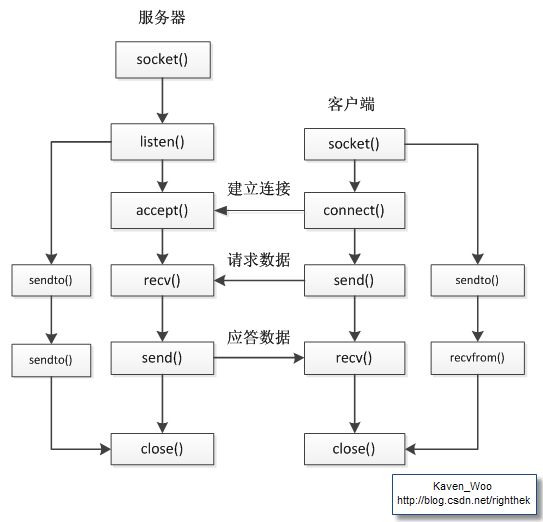
下面我们来写两个简单的基于Socket的CAN应用程序,但是我们采用的是SOCK_ROW,因此在套接字工作流程上有区别于SOCK_STREAM和SOCK_DGRAM。由于Socket采用C/S模型进行设计的,所以我们的这两个程序也分别为Server和Client。
首先是server端的程序,我们需要写一个服务器的程序,该程序接收来自客户端发来的数据,代码如下:
int can_recv()
{
int sock_fd;
unsigned long nbytes, len;
struct sockaddr_can addr;
struct ifreq ifr;
/*为了能够接收CAN报文,我们需要定义一个CAN数据格式的结构体变量*/
struct can_frame frame;
struct can_frame *ptr_frame;
/*建立套接字,设置为原始套接字,原始CAN协议 */
sock_fd = socket(PF_CAN,SOCK_RAW,CAN_RAW);
/*以下是对CAN接口进行初始化,如设置CAN接口名,即当我们用ifconfig命令时显示的名字 */
strcpy(ifr.ifr_name,"can0");
ioctl(sock_fd, SIOCGIFINDEX, &ifr);
printf("can0 can_ifindex = %x\n",ifr.ifr_ifindex);
/*设置CAN协议 */
addr.can_family = AF_CAN;
addr.can_ifindex = 0;
/*将刚生成的套接字与网络地址进行绑定*/
bind(sock_fd, (struct sockaddr*)&addr, sizeof(addr));
/*开始接收数据*/
nbytes = recvfrom(sock_fd, &frame, sizeof(struct can_frame), 0, (struct sockaddr *)&addr, &len);
/*get interface name of the received CAN frame*/
ifr.ifr_ifindex = addr.can_ifindex;
ioctl(sock_fd, SIOCGIFNAME, &ifr);
printf("Received a CAN frame from interface %s\n",ifr.ifr_name);
/*将接收到的CAN数据打印出来,其中ID为标识符,DLC为CAN的字节数,DATA为1帧报文的字节数*/
printf("CAN frame:\n ID = %x\n DLC = %x\n" \
"DATA = %s\n",frame.can_id,frame.can_dlc,frame.data);
ptr_frame = &frame;
return 0;
}
接下来是CAN的发送程序,即客户端,代码如下:
int can_send()
{
int sock_fd;
unsigned long nbytes;
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame;
/*建立套接字,设置为原始套接字,原始CAN协议 */
sock_fd = socket(PF_CAN,SOCK_RAW,CAN_RAW);
/*以下是对CAN接口进行初始化,如设置CAN接口名,即当我们用ifconfig命令时显示的名字 */
strcpy((char *)(ifr.ifr_name), "can0");
ioctl(sock_fd, SIOCGIFINDEX, &ifr);
printf("can0 can_ifindex = %x\n", ifr.ifr_ifindex);
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
/*将刚生成的套接字与CAN套接字地址进行绑定*/
bind(sock_fd, (struct sockaddr*)&addr, sizeof(addr));
/*设置CAN帧的ID号,可区分为标准帧和扩展帧的ID号*/
frame.can_id = 0x1122;
strcpy((char *)frame.data,"hello");
frame.can_dlc = strlen(frame.data);
printf("Send a CAN frame from interface %s\n", ifr.ifr_name);
/*开始发送数据*/
nbytes = sendto(sock_fd, &frame, sizeof(struct can_frame), 0, (struct sockaddr*)&addr, sizeof(addr));
return 0;
}
上面两个程序看完后,大家可能会有疑问,为什么这两个程序没有listen()和accept()函数呢?其实这两个程序是独立的运行的,并不像字节流套接字(SOCK_STREAM)和数据报套接字(SOCK_DGRAM),需要先运行服务器进行侦听。SOCK_STREAM和SOCK_DGRAM的两个server和client程序是通过网络相互收发数据。而CAN的socket的server和client程序收发数据的对象是CAN总线。server从CAN总线上接收数据,client将数据发到CAN总线上,当CAN总线上有数据时,server才能接收数据,当CAN总线空闲时,client才能将数据发送出去。
以上是对套接字的简单理解,并附上socket CAN的简单上层应用代码,如有不足之处,敬请谅解!















 646
646











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









